Building a PLCnext Controlled Can Crusher Part 1: The Design
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Designing a pneumatic-powered can crushing machine that uses the PLCnext platform for control and monitoring.
Building a pneumatic can crusher seems an easy task but does in fact require some finessing to make something that will successfully crush a can, without being too big or too loud.
We set out to make a can crusher that would be suitable for use indoors and without being too much of a distraction, so it needs to be fairly compact, self-contained and not too noisy — inevitably some sound will be emitted, but this cannot be avoided. The choice to use compressed air was settled upon as not only does it add a bit of a dramatic flair with all the hisses, but it also allows for a large amount of energy to be kept in a small package.
We will be using the PLCnext Control ecosystem from Phoenix contact (as covered in DesignSpark Ask the Expert) in this project, which includes a number of different PLC controllers (we have picked the PLCnext AXF C 2152), and a diverse range of IO modules ranging from simple digital in- and output modules to specialist modules designed to interface with things like strain gauges or even DALI lighting networks.
In particular, we will be using the Axioline Smart Elements digital input module that gives 16 digital inputs, the digital output module that gives 16 digital outputs, the analogue input module that gives 4 0-10V analogue inputs, and the AXL F PM EF 1F power measurement module that can handle up to three-phase voltage and current measurements at 5A directly, or can be interfaced to current transformers to handle higher currents.
The PLCnext controllers also have features aimed at Industrial IoT and Industry 4.0, with the inclusion of Ethernet that can be used for functions such as Profinet, OPC UA, other standard protocols such as HTTP/HTTPS, SNMP and others. Alongside the traditional PLC runtime environment that supports common IEC 61131-3 languages, there is also a Linux environment that can be used to run Python, C/C++ and C#, Node-RED, a fully customisable web browser-based HMI (Human-Machine Interface), Rust, .NET Core and others. Not only are the more modern automation protocols available to use, but Phoenix Contact has also kept compatibility with existing automation systems — converters that handle protocols such as Interbus, Profibus, CAN, RS485 and others are available to allow for integration into systems that might use these protocols.
Mechanical Design
The starting point for our design was the selection of the pneumatic cylinder, which needs to be large enough to be able to provide the forces required to crush a can and is one of the most important components of the crusher. Finding the forces required to crush a beverage can, was an exercise in reading academic papers, such as this one that listed forces of around 1000N. We assumed a value of 1500N to crush a can adequately, which should allow for any variations.

The original cylinder picked was the RS Pro 80mm bore, 125mm stroke double-acting cylinder (176-1705) , which would generate enough force to crush a can at around 4 bar. This cylinder was then changed, after some discussion, to the RS Pro 100mm bore, 200mm stroke double-acting cylinder (176-1706) which generates enough force at only 2.5 bar - making the machine even safer as we can run at lower pressures, but also giving us enough room in case we need to adjust the pressure to crush cans better.

We needed to design a suitable subassembly that can contain the can and hold the cylinder in place, and a plate to crush the can, necessitating the creation of custom steel components.
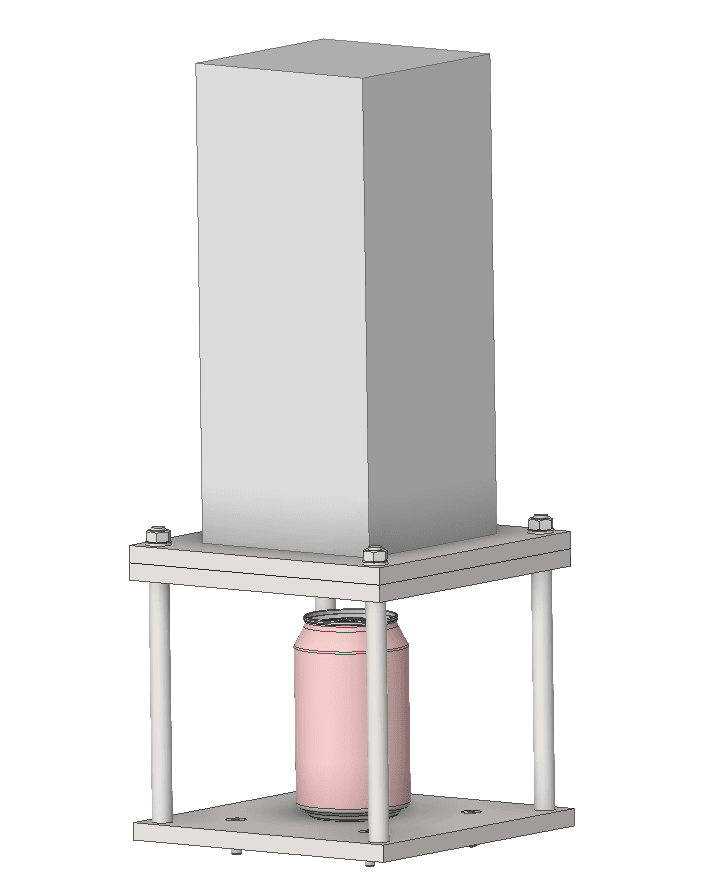
This assembly was simulated to check for deflection and any excessive stresses in the components, and fortunately, none were found.
What seemed like the next logical step was to design an enclosure to hold the rest of the componentry, since there is no use in having a can crusher when the rest of the components are scattered about. Given this might be used in an office kitchen environment, we settled upon a podium style design with the can crusher subassembly on top, and then all the control equipment and compressor located beneath. The height to the top of the podium was decided at 900mm, and then the can crush assembly adds another 500mm on top, once the guards are installed. Most of the size was dictated by the dimensions of the compressor which is 340x340x500mm, so the side lengths were all sized at 500mm.

Given the rough dimensions of the unit have been decided, we could begin work on building the frame. Aluminium extrusion was chosen as the frame material, as an ideal tradeoff between weight, ease of use, and availability, with the base being made of 40x40mm Bosch Rexroth extrusion (459-7205) and the top guards being made of 20x20mm Bosch Rexroth extrusion (466-7219) . The other advantage of using aluminium extrusion is there are a number of accessories that are available off the shelf, such as feet, wheels, door slides and so on.

Once most of the frame had been designed, some more custom steel components were created - a plate to hold the all the control equipment on a length of 35mm top hat DIN rail (467-416), another plate to sit in the bottom of the frame to hold the compressor, and finally, another plate to act as the top surface of the frame. As these are all relatively simple parts to have manufactured, the cost of raw materials and machining is fairly low.

Now that the bottom frame has been designed, the side panels for the frame were designed. We settled on using machined polycarbonate sheets, as it offers some impact protection whilst still showing off the internal componentry. These were designed and added to the model.

The top guard assembly was designed next, which will contain the can crusher assembly and stop foreign objects being inserted into the crush area whilst the crusher is in motion. Again, the frame was designed using 20x20mm extrusion with more polycarbonate sheeting to form the side panels. A sliding door was integrated into the front, and then a solenoid interlock switch (826-3953) integrated to add a safety interlock to the crusher.

Selection of the other components that will make the can crusher could now go ahead, as we know the dimensions of all the critical components, and the sizes of all the pneumatic and electrical fittings. This includes all the “Tee” fittings, reducers of various sizes, the tube itself and a number of other fittings to connect everything up.
Pneumatic Control Components
We started out designing the pneumatic control system and selecting the components. The very first step was to design a control system that could actuate the cylinder, and also fail-safe so that if power is lost or the control circuit fails, any stored pressure is vented to atmosphere (except from the compressor, as this would require modification of what is an already certified system).

The entire pneumatic circuit was drawn out in SMCDraw, provided free of charge by SMC Pneumatics. Two valves were used in the pneumatic, one 5/2 port valve (176-2115) for controlling the cylinder movement and a 3/2 port normally closed valve (176-2112) for venting the system to the atmosphere for safety. The solenoid valves are sold without coils, so a suitable 24Vdc coil (176-2130) was picked out, and two plugs (176-2066) to mate with the coils.
A number of other components were included mainly for adding better control over the system; the cylinder could be controlled with just one solenoid valve, but the components add some extra safety and feedback. Two SMC digital pressure sensors (700-7569) were used to monitor the state of the system, an analogue pressure gauge (777-075) to mount in a location visible to the user, two-speed control valves (210-014) to adjust the movement speed of the cylinder and a number of brass silencers (176-2279) to help manage the noise of compressed air release.
Electrical Control Components

With the pneumatic control circuit designed, we then began selecting the electrical components to bring the system together. At the heart of the system will be a Phoenix Contact PLCnext AXF C 2152 controller (177-1391) , together with the AXL Smart Elements DI16/DO16/AI4 I/O modules to interface with the pressure sensors, buttons and solenoid valves, and the AXL F PM EF 1F Power Measurement Module to measure the compressor running current and voltage. The components all operate at 24Vdc, which is a common control voltage in industrial automation, so we picked an RS Pro 24Vdc DIN rail power supply (136-8310) that is capable of providing enough current to power everything.
Other ancillary components, such as fuse holders (189-5333) , DIN rail terminals (878-7506) , a rotary isolator for power (257-9384) and other parts, were picked so that we could connect all the components together.
Safety Components
As we have a machine that is capable of producing a large amount of force and includes hazards relating to the stored energy of compressed air and the crushing risk, we opted to use a suitable safety controller in combination with the safety interlock to implement further safety measures.
We spoke to the product manager for Safety & Networks at Phoenix Contact, who was very helpful and advised us on the right controller to use given the set of criteria we had provided. The controller that was agreed upon was the PSR-M-B2-SDI8-SDO4-DO4-PI, which features 8 safe inputs, 4 safe outputs, and either 4 reset inputs or 4 signal outputs which are configuration dependent. This provides us with enough IO to handle all our door interlock and solenoids, the two e-stop buttons, and the two cylinders that control the cylinder movements.

The safety controller is also programmable over USB, which allows for flexibility in how the IO is configured. In addition, this allows for routines to be programmed in — for example the door unlock routine could wait until a timeout has expired after receiving a pulse from the PLC indicating a request to unlock the door, which would ensure the cylinder is in the safe home position before unlocking.

As there is a need to lock the door, we picked an interlock switch (826-3953) that requires power to release the interlock key from the interlock switch, adding an element of safety as there will be restricted access to the crush area when the unit is in operation. This will be mounted on the underside of the top cover of the unit, reducing the ability to tamper with and defeat the interlock.
Two emergency stop buttons (795-1306) were also specified, as this will allow for interruption of the machine should anything go awry. These will also be connected into the safety controller, which can provide clock outputs that are fed through the safety circuits to detect for breaks, crossed circuits and stuck contacts.
Wrapping up and Next Steps
In the first part of this series, we have taken a look at some of the design choices made in constructing a pneumatic can crusher, and the safety aspects that have to be considered in the design.
In the next post of this series, we will begin construction of the can crusher by making a mockup of the frame design using acrylic and MDF sheets, before committing to getting custom parts machined and cutting all the other parts to size and then beginning full construction.
Comments