University of Southampton team go for gold at Eurobot 2020
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Who are we?

We are a team of four third year mechanical engineering students from the University of Southampton. Last year, as part of our degree, teams of five were randomly assigned and took part in the Eurobot 2019 competition. That year, each of the members in this year’s team took the role of team leader in different groups and so were responsible for ensuring the success of their individual teams.
At the UK Eurobot finals last year our teams finished 1st, 2nd, 4th, and 5th which resulted in two of the teams (1st and 2nd) qualifying for the World Finals in France. The teams placed 17th and 19th at the World Finals, and were impressed by their performance considering some other teams have been in the competition for over ten years, are composed of over fifty members, and spent €150,000 on the 2019 competition alone.

With a strong understanding of what it takes to succeed in the competition, and an existing relationship with RS Components, we decided to form a team and partner with RS to surpass last year’s achievements.
What is Eurobot?
Eurobot is an international mechatronics competition where autonomous robots compete against each other in a pick and place timed exercise. Teams employ advanced manufacturing techniques, involving CAD, laser cutting, 3D printing, and soldering. Through a systems design approach, and utilising these manufacturing techniques, the competing students develop a final product.
The 2020 theme is ‘Sail the World’, where teams accumulate points by having dynamic mechatronic systems retrieving and delivering coloured cups, called buoys, to the corresponding teams’ ports, and fairways for additional points (seen in the diagrams below). In addition, a stationary mechatronic system, that must be activated by the autonomous robots, representing a lighthouse, can be developed for additional points. With the theme of this year’s competition being nautical and the team coming from the University of Southampton we chose our team name to be The Titanic Buoys. Building on our team name we gave the robots appropriate names, Jack and Rose. This is in reference to the movie Titanic.

The world finals consist of the top three teams of each participating country. In order to qualify for the world finals, a good performance in the national finals is therefore necessary.
Our Strategy
With the experience gathered from last year’s competition, the team knew that the most important consideration when designing our strategy was consistency. For this reason, during the initial design stages, simple strategies and robots with minimal moving parts were prioritised.
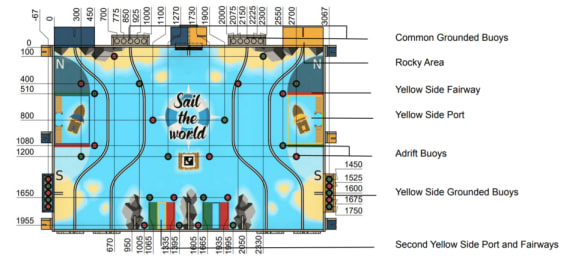
Names of key points in the playing area
One of the main difficulties with last year’s competition was the highly valued Goldenium atom positioned on the opposite side of the table. Subsequently, many teams targeted this atom in their strategy even with the increased risk of colliding with opposition robots and receiving a costly penalty.
In this year’s competition, there are some point scoring activities positioned on the opposition side of the table, notably the second port and the common grounded buoys. However, the team decided to focus on all of the point scoring activities on our side of the table in order to avoid contact with opposition robots.
On the table there are both grounded buoys and adrift buoys, seen in the figure above. The grounded buoys are located within mounts in predefined positions whereas the adrift buoys are located on the table itself. To target both varieties of buoys, each of our two robots was customised to each type of buoy.
For the adrift buoys, the team designed Jack which has two compartments, guiding arms, and is able to store a total of four buoys. The compartments can be utilised to separate the buoys by colour. This allows the robot to place the stored buoys onto the correctly coloured fairway, scoring the maximum possible points.

Initial concept of Jack designed for classifying and transporting adrift buoys
In regards to the grounded buoys, we devised Rose which can pick up a total of four grounded buoys and subsequently place those of the appropriate colour on the correct fairway. This is through the use of foam coated arms. The arms will be inserted into the buoys, and the foam lining wil hold the cups without the need for any additional electronics. In contrast, European teams were seen to utilise active pumps and suction last year to lift items from the table and will, most likely, be using similar technologies to compete against us. Differences in the design from team to team are dependent on budget, team size, and experience.

Initial concept of Rose designed to lift and classify grounded buoys

Current designs of Rose and Jack
The final aspect of the competition this year is a lighthouse which, when activated, has to rise from a maximum initial position of 300 mm to a minimum final position of 700 mm. At the final height, it must have a rotating light that is visible to the audience. The major challenge in the design of the lighthouse is the difference in height between its undeployed and deployed state.
Having identified the diagonal length of the rocky area, where the lighthouse is mounted, as being 502 mm, the team realised that a "seesaw" mechanism could be used to arrive at the final height from the initial one. This is because the diagonal length of the rocky area is greater than the needed increase in height of the lighthouse. A seesaw mechanism avoids the need for more complex rack and pinion designs.
How is the project progressing?
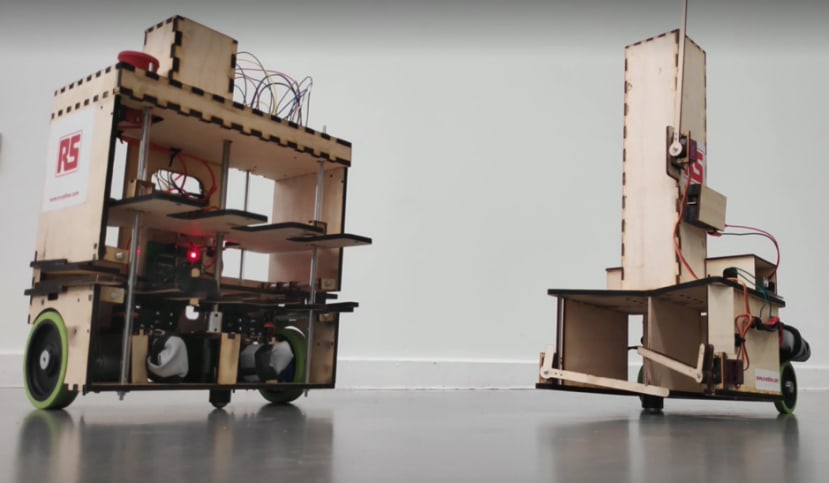
Initial prototypes of Rose and Jack
Since partnering with RS Components, the team has completed the design, test, and build of the initial robot prototypes.
Many design meetings were conducted to rigorously remove potential flaws seen in the CAD drawings. This minimises the number of iterations between the initial and final prototype. After suitable designs were agreed upon, the team began building initial prototypes for testing. Tools supplied by RS Components gave a large amount of independence to the team, enabling construction not to rely on the university’s workshop availability. Due to this independence, in just under one week the team was able to construct the chassis, shown above, and solder the power circuits, shown below.

Electronic circuit of components in ‘Rose’
Alongside the design process, the components supplied by RS were standalone tested so that as soon as the robots were constructed, the initial control system could also be immediately integrated. The quality of the components was clear as most of the team members bought the cheapest parts available for the 2019 competition. Unreliable components were the root cause behind many matches lost last year. Therefore the team hopes that we will be more successful this year using the components supplied by RS. A video of the initial robots in action can be seen below.
Computer vision prototyping

A significant difference in strategy this year is the plan to be the first UK team to utilise computer vision in the competition. The rulebook states that QR codes must be present at the top of each robot (seen above), so a vision system is being developed to capitalise on this rule. Computer vision will enable more reliable obstacle avoidance, as well as adaptive scenario-based strategies. A working prototype of this system has also been completed using a Raspberry Pi, and camera purchased from RS Components.
Next steps
In the coming months, the team will iterate through prototypes of the robots and systems to create an optimum design for the competition. This includes creating the foam coated arms for Rose and building the Lighthouse. A final design will be completed before the UK final in April, with programmed paths and logic ready for the more advanced teams at the world final. In order to reach this goal, the majority of our time will be spent testing the robots on a table made to the specifications of the competition which will be ready from the middle of February.