RS Sponsored International Robotics Competition Entry
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Who are we?
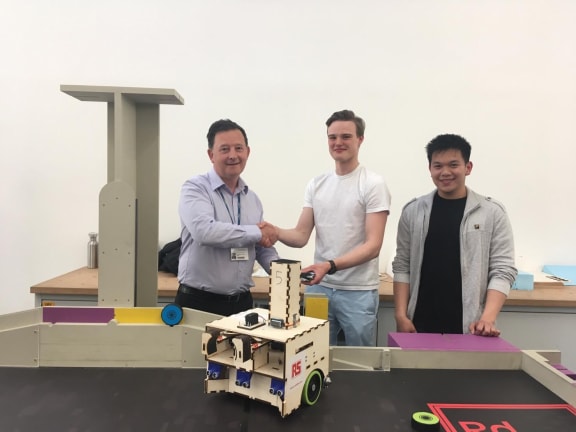
We are a team of five second-year mechanical engineering students (only two are shown in the photo) from the University of Southampton who competed in the 2019 Eurobot competition. This project formed 90% of our Systems Design and Computing module this year and involved building a robot which competed in the UK Eurobot Final and also a University of Southampton Eurobot Final against our peers. The performance of the team at the Southampton Final determined our grade in the module. Teams were randomly assigned and so our group met for the first time on February 1st, less than three months before the UK Final on April 24th.
What is Eurobot?
Eurobot is an international robotics competition where teams build autonomous robots which compete to score as many points as possible on a set course. An interesting aspect of the competition is that matches are played simultaneously with your robot and the opponent’s on the course at the same time. This makes it very important to have a consistent obstacle avoidance system which will stop your robot prior to a collision. Finally, matches are played for 100 seconds and in that time teams aim to score as many points as possible. An example of a Eurobot match from one of the best teams in the world RCVA (the black robots) in the 2018 edition of Eurobot is shown below.
Every year the Eurobot competition has a different theme with this year’s being an “atom factory”. Tasks such as activating a particle accelerator and weighing atoms (actually ice hockey pucks) were features of this year's course. The entirety of the rules for Eurobot 2019 can be found here.
The Eurobot competition itself is split into two parts which are the qualification phase and then the knockout stage. In the qualification phase matches are played in which the aim is not to beat the opposition but instead to score the maximum number of points possible. After every qualification match has been played all the points are added together and the top eight scoring teams qualify for the knockouts. In order to progress in the knockouts, a team must score more points than the opposition at the end of their match.
How did we decide on our robot’s design?
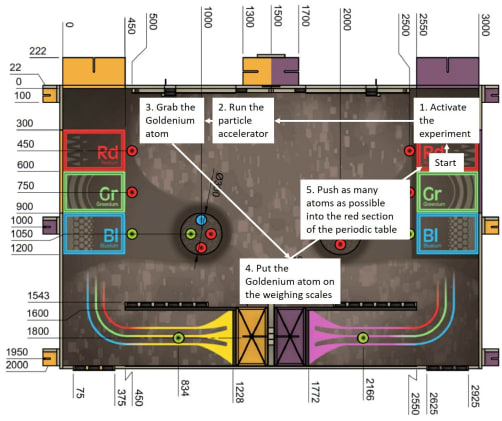
With the robot being autonomous it was very important that the design strategy chosen was reasonably simple. This was to ensure that the robot could score the desired number of points consistently. With this in mind, the team decided to only build one robot even though two are permitted in the rules. This was done so that we could effectively use our limited time to perfect the single robot. In order to decide our strategy, the highest scoring tasks were identified and then prioritised. After this process, our strategy was to grab the Goldenium atom, revealed after running the particle accelerator, and then to place it on the weighing scales. This was believed to be a good balance between scoring a large number of points and being manageable in the short timescale. This strategy which is shown in the strategy map below inspired our robot’s name which is The Goldenium Grabber.
It should be noted that one of the tasks identified as scoring a large number of points was the "experiment" which involved making a device to climb a wire. This was separate to the robot and was made using a stepper motor which reeled in a length of wire. The experiment can be seen functioning in the competition footage of our robot further down the article.
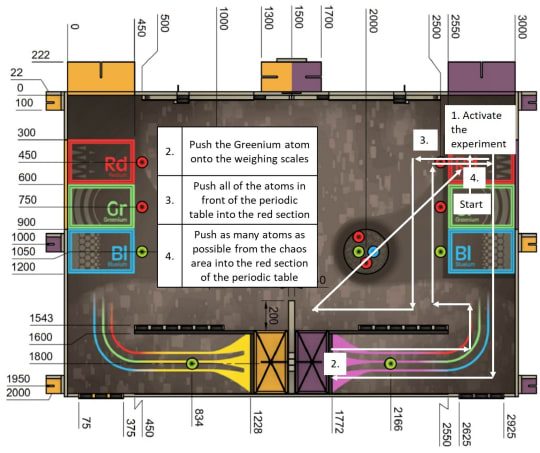
However, after considering this strategy further, we realised that the strategy was rather risky as it involved going into the opponent's side of the course and so made collisions more likely. If a collision were to occur it could result in a poor points score which would be disastrous for the qualification phase. For this reason, another more conservative strategy was devised in which our robot would stay on our side of the table and so score more consistently. We decided to program both strategies into the robot and called the first strategy “Aggressive mode" and the alternative one "Conservative mode". Either strategy could be chosen before a match depending on how many points we needed to score and where we thought the other team's robot would be during the contest. The strategy map for conservative mode is shown below.
Final Design
In the picture below our finished experiment and robot can be seen. The robot has a four-bar linkage grabber for the Goldenium atom, servo controlled arms at the sides to activate the particle accelerator and a plough in the front to manipulate atoms on the table floor. The method of controlling our robot was with the use of an Arduino Uno microcontroller, an MD25 motor controller, and two EMG30 motors. A project such as this really shows the admirable capabilities and versatility of Arduino microcontrollers which are available at RS Components.

As our robot has no manual control all necessary movements had to be pre-programmed. We were able to accomplish this with reasonable accuracy through the use of built-in encoders within our motors. These measure the rotation of the wheels and therefore the distance the robot has travelled can be calculated. Navigation through the use of this method is known as odometry. However, there is a significant issue with odometry which is wheel slippage. When wheel slippage occurred it caused our robot to not travel as far as intended. These inaccuracies would accumulate and therefore lead to a considerable error by the end of a run. Thanks to our sponsorship from RS Components we were able to source superior wheels for our robot from the USA. Using these higher quality wheels ensured minimal slippage and therefore a more consistent and successful robot.
With our design built we were then able to program both aggressive and conservative modes. Videos of our robot performing these runs are shown below, first aggressive mode and then conservative mode. Please turn captions on to get an explanation of what is going on.
UK Eurobot Final
Unfortunately, the table at the UK Finals was of inferior quality to the one which we had been testing on in Southampton. This meant that a last minute change of strategy had to be made which scored fewer points than was desired. Nevertheless, we qualified for the knockouts as the 5th seed but unfortunately lost to the 4th seed in the quarterfinals by 2 points. A video of one of our qualification matches is below (again please turn captions on). This competition was a great learning experience for the team which was invaluable for the Southampton Final, in which our grades were based.
Southampton Eurobot Final
This competition went very well with the careful use of both aggressive and conservative modes allowing the team to qualify for the knockouts and then to progress to the semifinal. This is where our obstacle avoidance system, programmed to stop the robot before colliding into another, failed for the first time in a competitive match. Unfortunately, with the resulting points penalty, we did not qualify for the final. In the 3rd 4th place playoff we played the team which had won the UK Final so even though we scored well we were unable to beat them. The video below shows the 3rd 4th place playoff (yet again please turn captions on). Although unlucky not to reach the final the team was happy to finish 4th out of the 12 Southampton teams.
Sponsorship
The team would like to finish by thanking RS Components whose sponsorship allowed us to buy superior components, at no cost to ourselves, which was one of the reasons why we performed as well as we did.