DIYアンテナ測定システム Part 1: はじめに
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
ebm-papst製 ECモータに、RevPi CoreとLimeSDR Miniを統合し、アンテナ性能を測定するシステムを作成する。RevPi Coreはモーターの制御、LimeSDR Miniは信号の生成・受信の役割を担う。
DesignSparkによる新しい「ebm-papst K4ドライブシステム開発キット」のプレビューは、こちらからご覧いただきたい。

アンテナ設計は実に興味深い分野の1つだ。小規模な設計変更により大きな効果が得られる場合があり、革新的で、常に活発な研究開発が行われている分野となっている。
本記事シリーズでは、設計の進行と、Enhanced Machine Controller Antenna Range (EMCAR)オープンソースプロジェクトに基づいた低コストのシステムの構築を追っていく。
基本事項
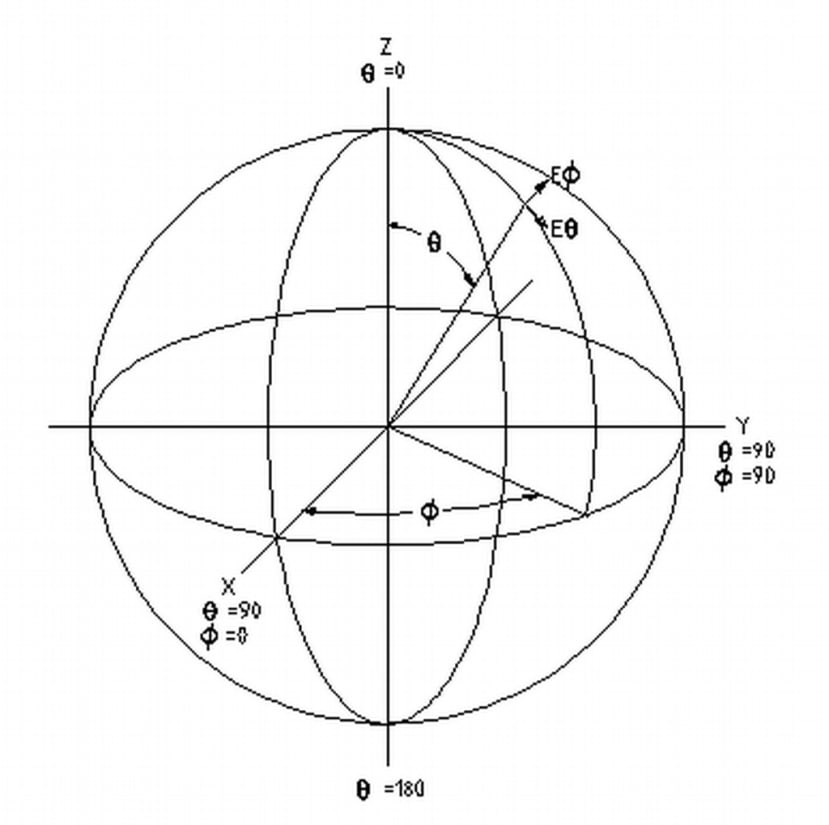
IEEE規格149-1979 アンテナ測定用座標系(出典: EMCARプロジェクト)
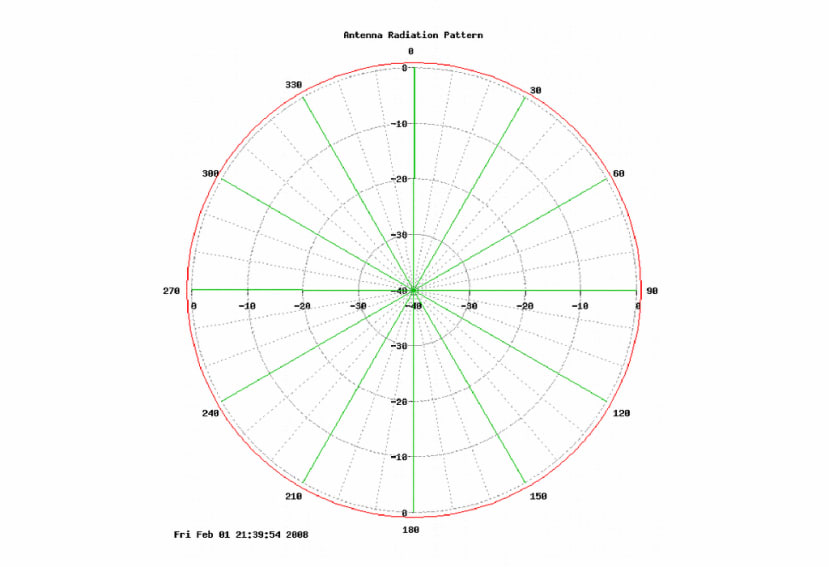
まず、アンテナの放射パターンを測定する場合を考える。この場合は、出力が2Dの極座標プロットになる。3Dプロットの生成を可能にするため、将来的に設計のアップグレードを目指すことも可能だが、現時点では、正方向/逆方向、側面方向のアンテナ利得を確認できればよいため、2Dで十分だ。無指向性アンテナ、ポイントツーポイントリンクに対応する高い利得と高度な指向性があるもの、あるいは狭角で「セクタ分割された」マルチアンテナの使用に適したものが必要な場合において、アンテナ利得などの情報は非常に重要だ。
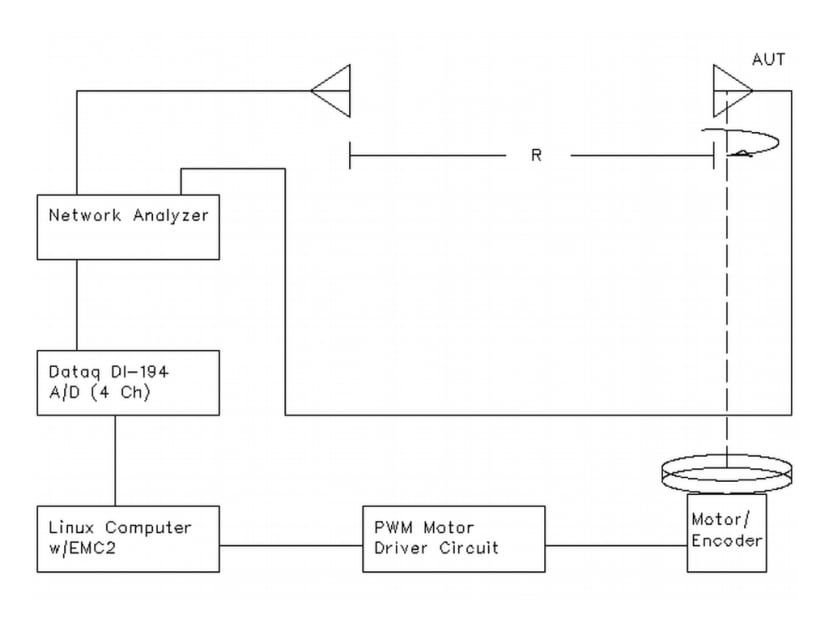
アンテナ測定システムブロックダイアグラム(出典: EMCARプロジェクト)
基本原理は実際のところかなりシンプルだ。私たちは、回転するプラットフォームにテスト用のアンテナを固定し、2台目の固定式アンテナをある程度離れた場所に設置した。いずれもRFネットワークアナライザに接続されており、1台目は回転しながら測定を行なう。
私たちの作成したシステムでは本格的なネットワークアナライザを使用しない。代わりに、LimeSDR Mini ソフトウェア無線(SDR)をベースとして、よりシンプルで低コストなシステムを実現する。
モーター

モータは重要な部品で、その性能は私たちの測定システムの性能に直結する。モータの位置を高精度に把握する必要があり、処理に長い時間を取られたくなければ、その動作が非常にスムーズである必要がある(そうでないと、アンテナが不安定になる場合があり、動作のステップ間で停止する必要がでてきてしまう)。
回転プラットフォームは、必要に応じて小さくすることも、大きくすることもできる。三脚や他のマウントを使って、プラットフォームに大型のアンテナ構造を直接取り付けることも可能だ。その場合、プラットフォームを支える頑丈なフレーム、その下にソリッドベアリング、アンテナを駆動する適度に強力なモータが必要となる。
数多くの選択肢がある中で、元のEMCAR設計で使用されているステッパモータも候補の一つだった。また、速度を低下させ更にスムーズな動きを作り出すため、ベルトとプーリーを使用することも考えた。しかし私たちは、ドライブエレクトロニクスとギアボックス内蔵のebm-papst電子整流モータ (187-2145) を使用することにした。スムーズな動きの制御をシンプルに実現できる。
制御

制御システムのベースには、Kunbus Revolution Pi Core (181-1141) を使用する。RevPi Coreは、多くの産業用アナログ・デジタルI/Oを簡単に追加できる点が強みだ。これに加え、さまざまなプログラミングオプションを使用できる。私たちのケースでは、EMCARプロジェクトの既存のコード(CとPythonを組み合わせたもの)を使用することになると思う。
RF測定
これで、テスト用のアンテナを回転させ、その位置と測定プロセスを制御する方法が決まった。次は、実際にRF測定を行う必要がある。
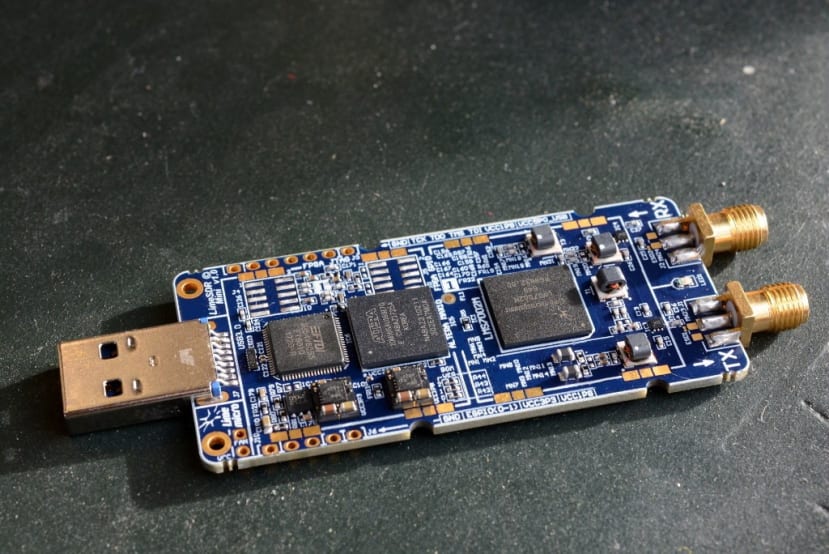
RF測定には、低コストのLimeSDR Mini SDRを使用する。対象の周波数で信号を生成し、受信アンテナでこの信号を測定する。
次のステップ
次の記事では、プラットフォームに使用する電子的・機械的な支持構造物用の筐体設計とプロトタイピング、プラットフォーム設計、ベアリング、そしてモータカップリングについて説明する。
次のパート:パート2