Remap UK - Wheelchair and Tablet Control Solution: Part 2
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Remap is a UK charity that provides bespoke engineered solutions to help people with disabilities to achieve greater independence and quality of life ( Remap.org.uk ). As reported in our recent article - UK charity Remap provides bespoke solution for independent control of wheelchair and tablet, we are providing a solution for Kane to become more independent by giving him the ability to control various components of his wheelchair that normally are carried out for him by his parents or a carer.
When Kane wishes to use his tablet, it is swung in front of him on a hinged Daessy support arm. This arm is hinged to the bottom frame of the wheelchair which allows it to move forward in front of him, or backwards behind the rear handrails. At the top end of the arm, there is another hinge that allows a second section to be lowered horizontally in front of him and is where the tablet is mounted. Kane is then given a mouth pointer with which he can then use his tablet.
When Kane wishes to drive his wheelchair using a chin operated joystick, the tablet arm is moved out of the way by lifting the top section up, and then swinging the whole arm backwards behind the rear handrails. The arm with the joystick is then slid into its fixed support bracket, which then holds the joystick just in front of Kane’s chin.
Currently, once the tablet is in front of him, he is stuck in the location he finds himself in. Likewise, while using the joystick to drive himself to a location and park the wheelchair, he is then unable to use his tablet. Both these situations require his parents or a carer to swap the support arms around before Kane can change what he is doing. The objectives of this project are to allow Kane to control the movement of the tablet and joystick arms himself without any assistance from anyone else. Despite Kane not being able to use his hands, he is quite adept with using a mouth pointer and can also operate buttons positioned on either side of his head. The idea is therefore to use head controlled buttons to manoeuvre the tablet and joystick arms in and out of position, allowing Kane do decide what he wants to do and when without having to ask for assistance.
One constraint was that whatever solution we came up with, it should not permanently alter any of the components of the wheelchair. E.g. no cutting, drilling, bending, etc. would be carried out. If the project proved to be impossible to do, then all the components could be removed, leaving the chair in its original condition, and usable just like it was before the project was started. This meant that any motors or levers would have to be bolted to, or clamped around the existing support arms, and driven by the new motors.
Initial contact with Daessy & Dutch company HMC- NV confirmed that no off the shelf motorized arms existed, so the only solution was to attempt to develop one ourselves. To prove if it was going to be possible, the focus was to be on motorising the top Daessy hinge first. If that proved successful, then work would continue to develop motorising the remaining motions of forward and backward too, both for the tablet arm, and also the joystick arm.
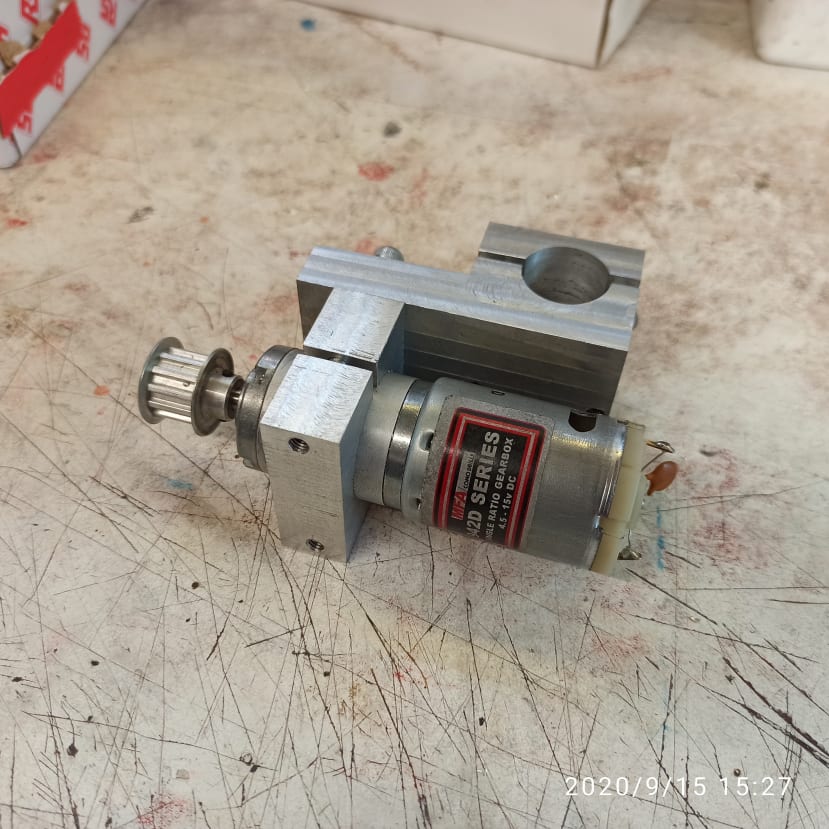
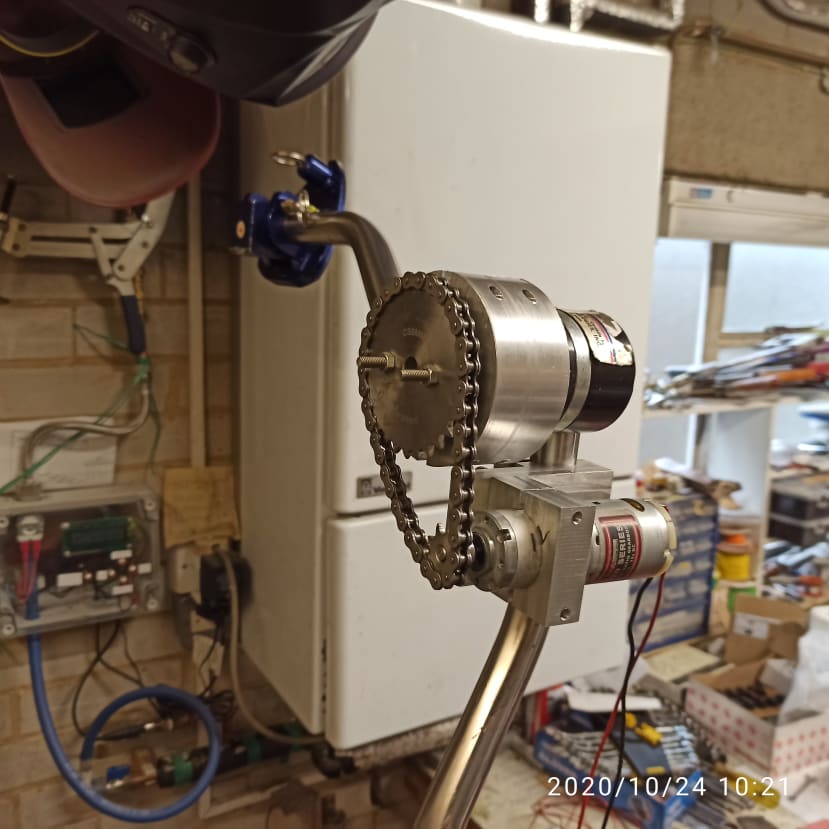
The first solution incorporates a mechanism that bolts onto the top hinge. It is a motorised mechanism, using a chain and sprocket drive (an initial toothed belt system slipped on occasions). In the end, two mechanisms will be required; one to manoeuvre the arm supporting the drive joystick, and the other to manoeuvre the tablet support arm.
The attached pictures show the clamp (machined from a square slab of aluminium) ready for insert of the toothed wheel, the support clamp for the motor, and the final assembly ready for testing of movement of the Daessy arm.

The software for driving the motors was designed to coordinate the movements of the forward/backward and up/down action of the two arms.
After proving that the motor could lift and lower the arm with the tablet on it, we needed to know where the arm was so that we could turn the motor off once it reached the end of its travel. This required two sensors to be positioned somewhere on the mechanism that would detect when the arm was fully up or fully down. Microswitches were preferred over photo-interrupter devices, to enable suitable functions at “end of travel” of the Daessy arm. These are shown in the photo.

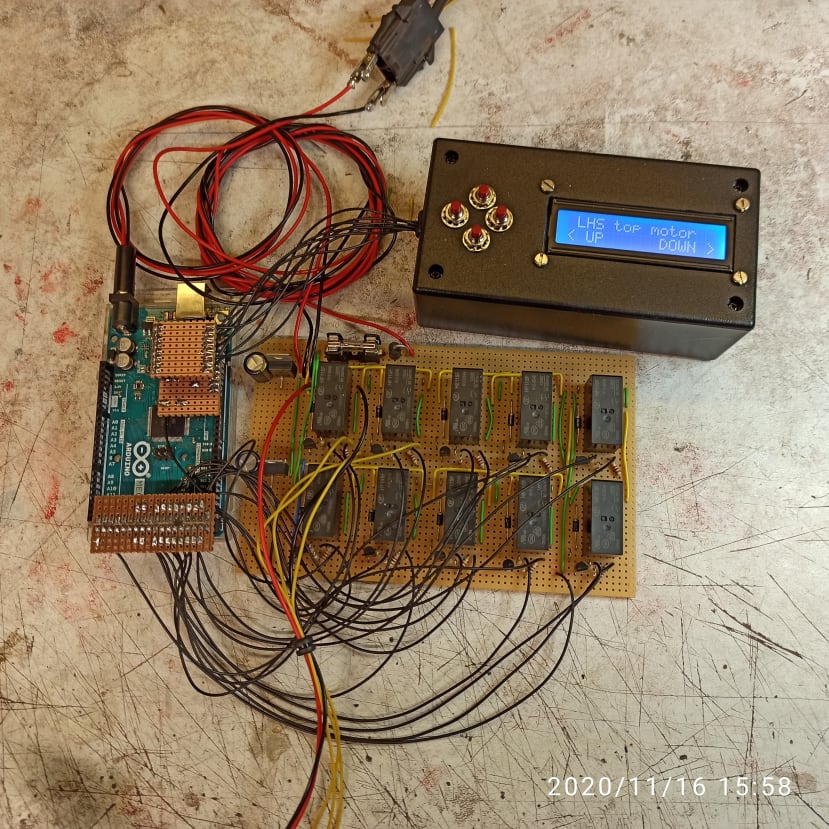
With the top hinge mechanics now ready for testing, I turned my attention to the control of the motors. The whole system would be controlled from a readily available one-board-computer such as an Arduino (715-4084) , but I needed to design and build the electronic interface between the two, so that the Arduino knew where the arms were, and could turn each motor on and off when necessary. The main controlling components are shown in the photo below e.g. the Arduino (top left), the interface board (bottom left), and a test box for diagnostic purposes (top right)
I needed to control five motors and five sets of sensors. E.g. all the following:
- Tablet arm up and down motor with up and down sensors.
- Tablet arm forward and backward motor with forward and backward sensors
- Joystick arm up and down motor with up and down sensors.
- Joystick forward and backward motor with forward and backward sensors
- Mouth pointer “offer and retract” motor with “offer and retract” sensors.
Compact linear actuators were procured to enable a more user and space-friendly operation to move the support arms forward and backwards. Again, bespoke machined clamps and attachments are required to fit the actuator to the arm, and then to the wheelchair arm.


Once the solution was proven through initial trials, it became apparent that on top of motorising the two arms, some form of storage device would be needed to keep hold of the mouth pointer. The mechanism would need to hold the mouth pointer securely when necessary, but when needed, would offer it up to Kane to grab with his mouth and then use.
The development of this mouth pointer dispenser will be described in detail in the next DesignSpark article, together with information on adaptations and redesign of the control system in light of practical and safety-related issues.