Remap UK - Wheelchair and Tablet Control Solution: Part 3
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Remap is a UK charity that provides bespoke engineered solutions to help people with disabilities to achieve greater independence and quality of life (Remap.org.uk).
As reported in our recent articles (Part 1) and (Part 2), we are providing a solution for Kane to become more independent by giving him the ability to control various components of his wheelchair that normally are carried out for him by his parents or a carer. This article focuses on the stick dispenser to allow Kane to independently operate his tablet using his mouth pointer while allowing separate control of the movement of the wheelchair once the pointer is parked in its storage device.
The stick dispenser needs to be in positions such that the client can park the stick when needed but can also pick it up again without any assistance from his parents or a helper. The mechanism will hold the pointer in place without dropping it whenever the arm is raised and moved out of position.
The pointer needs to be held securely in some form of mechanism for when the arm is moved out of the way to make room for the joystick arm. The mechanism also needs to be able to offer the pointer back to Kane when needed.
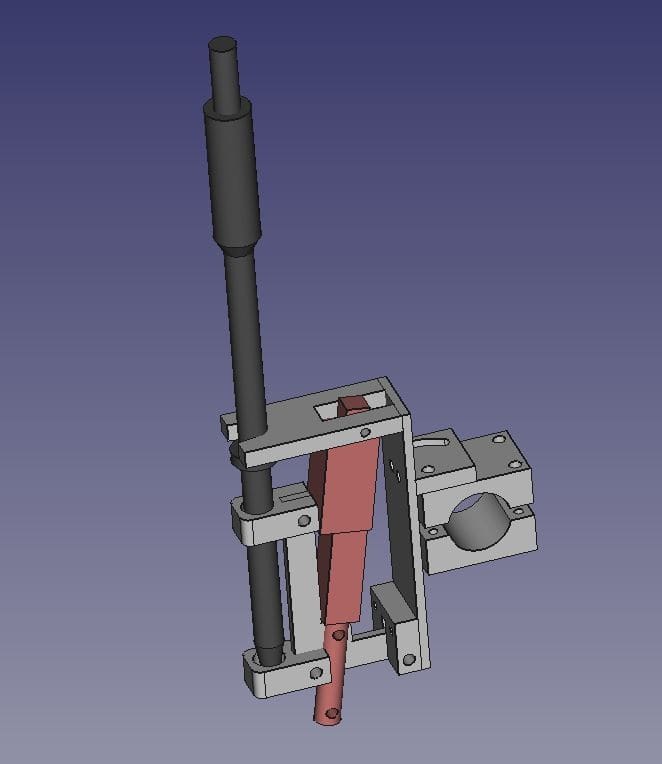
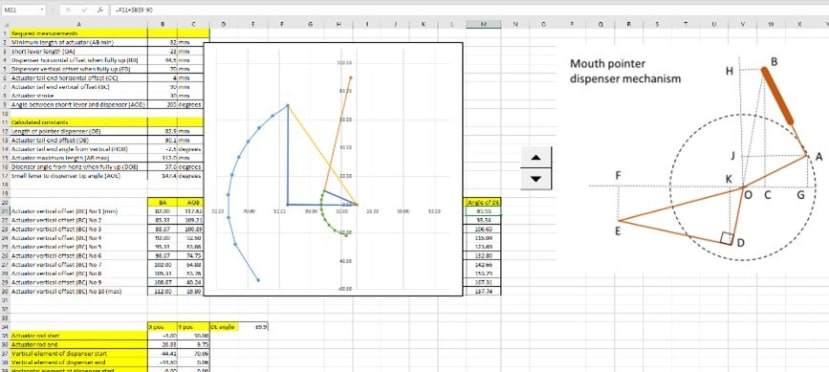
With the help of an open-source drawing package (FreeCad) and an Excel spreadsheet, our volunteer engineer Noel created a prototype design that would secure the horizontal section of the Daessy arm. In the schematic diagram, the stick is shown in black and the motor driving the mechanism in pink. The section in grey clamps onto the horizontal Daessy arm, and the lever holding the pointer pivots at the bottom such that the pointer can be offered out.
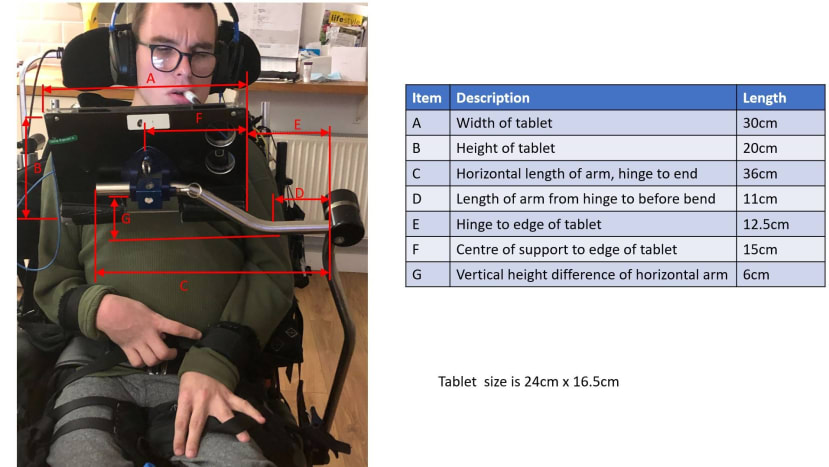
Further information was needed on the “working space” around Kane and the Daessy arm, in order to develop the system. With an understanding of what was being proposed for a “pointer dispenser”, Kane and his parents provided a video showing how Kane could drop his mouth pointer into a receptacle and pick it up again. They used an apple corer as a makeshift holder and positioned it at various angles to show how Kane could drop off and pick up his pointer.
After discussion, measurements were undertaken to confirm the space and movement requirements.
A revised CAD design is done and the tech diagrams printed, work proceeded to make and assemble the ten component parts, mostly out of aluminium. The assembly is shown in the photo

Several additional issues were necessary to consider, in terms of how Kane would operate this dispenser, including switches for moving the arms in and out of position, this also required some adjustment to the Arduino software. Kane’s parents loaned one of his wheelchairs so that the equipment could be properly checked in the engineering workshop. Noel was able to provide a video discussion of his progress during the covid restrictions so that further discussion and optimisation could take place.
Further optimisation of the daessy arm system already built, was also necessary, to cope with the differences between the two wheelchairs that Kane is using.
As we progressed towards finalising the design, a peer review of the complete system was undertaken by Remap experts. Design improvements were discussed including several safety issues such as current sensing, motor speed control, and watchdog timers to restart the system if necessary. With these new features in place, it would then be possible, for example, to detect if the motors had hit an obstruction. The current movement of the arm could then be stopped, with the motors backing the arm off from the obstruction if necessary.
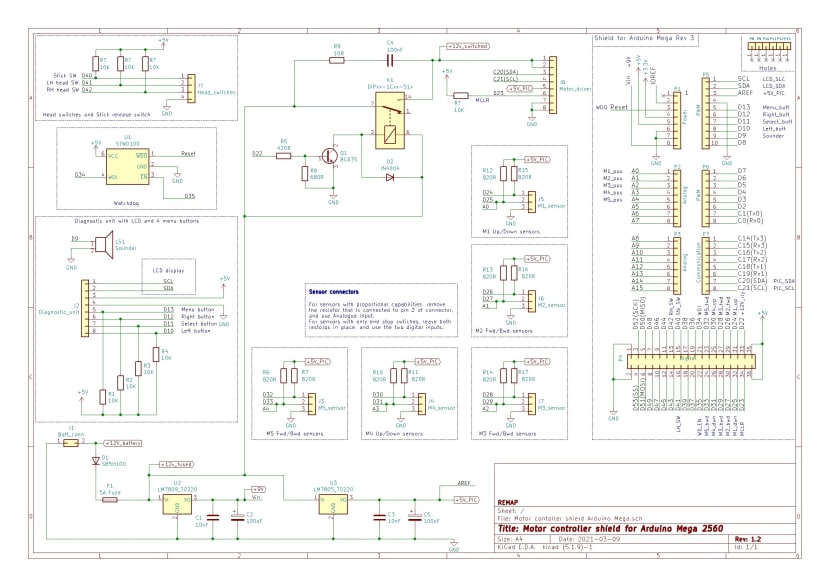
The main system board was redesigned to accommodate these refinements. A purpose-built PCB rather than a hand-wired breadboard was made, using the open-source PCB package, KiCad to develop the design. Examples below show the Arduino shield circuit and the PIC-based motor controller

As we move to the present day, the equipment and controls modifications continue to be progressed by engineer Noel, and ongoing hurdles overcome, towards the goal of final completion. Once this is done, we will provide a further update showing the final solution in operation.