Stepper motors and drives, what is full step, half step and microstepping?
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Full step and half step
Stepper drives control how a stepper motor operates, there are three commonly used excitation modes for stepper motors, full step, half step and microstepping. These excitation modes have an effect on both the running properties and torque the motor delivers.
A stepper motor converts electronic signals into mechanical movement each time an incoming pulse is applied to the motor. Each pulse moves the shaft in fixed increments. If the stepper motor has a 1.8° step resolution, then in order for shaft to rotate one complete revolution, in full step operation, the stepper motor would need to receive 200 pulses, 360° ÷ 1.8 = 200.
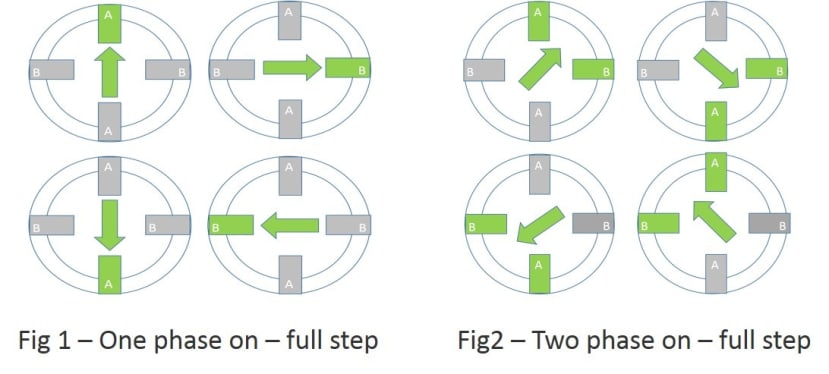
There are two types of full step excitation modes.
In one-phase on - full step, Fig1, the motor is operated with only one phase energized at a time. This mode requires the least amount of power from the driver of any of the excitation modes.
In two-phase on - full step, Fig2, the motor is operated with both phases energized at the same time. This mode provides improved torque and speed performance. Two-phase on provides about 30% to 40% more torque than one phase on, however it requires twice as much power from the driver.
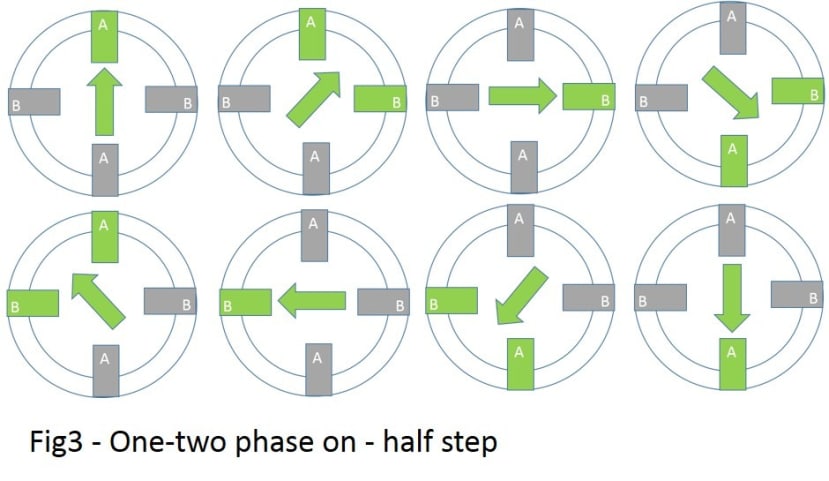
Half step excitation mode is a combination of one phase on and two phase on full step modes. This results in half the basic step angle. This smaller step angle provides smoother operation due the increased resolution of the angle.
Half step produces about 15% less torque than two phase on - full step, however modified half stepping eliminates the torque decrease by increasing the current applied to the motor when a single phase is energized. See Fig3
Microstepping for greater control and smoother operation
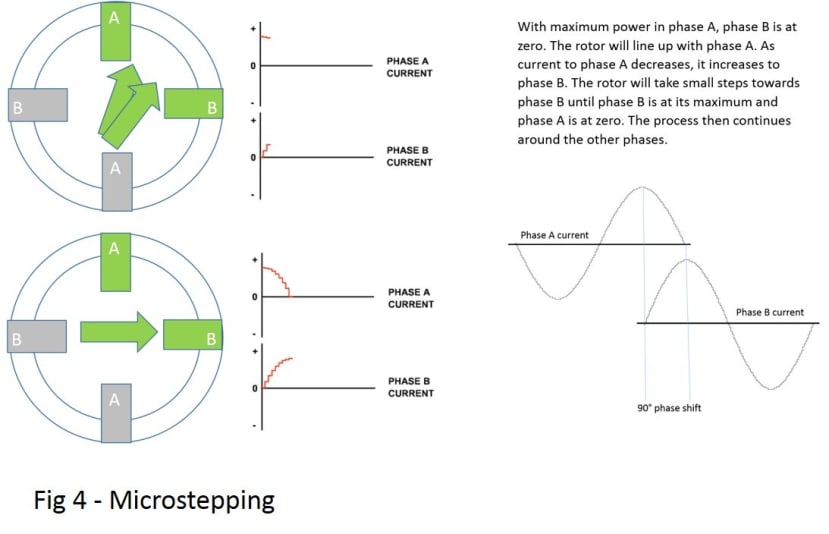
Microstepping can divide a motor’s basic step by up to 256 times, making small steps smaller. A Micro drive uses two current sinewaves 90° apart, this is perfect for enabling smooth running of the motor. You will notice that the motor runs is quietly and with no real detectable stepping action.
By controlling direction and amplitude of the current flow in each winding, the resolution increases and the characteristics of the motor improve, giving less vibration and smoother operation. Because the sinewaves work together there is a smooth transition from one winding to the other. When current increases in one it decreases in the other resulting in a smooth step progression and maintained torque output. See Fig4
See our latest introductions of Sanyo Denki stepper motors and microcontrollers, plus other great ranges from the following brands.

Key Stepper Manufacturers available from RS
Example product:
(535-0401)
Example product:
(829-3525)
Example product:
(044-0262)

Example product:
(877-7247)

Example product:
(337-3727)
Example product:
(793-4127)

Comments