Schrittmotoren und -antriebe – was bedeutet Vollschritt, Halbschritt und Mikroschritt?
Artikel folgen
 Dave von DesignSpark
Dave von DesignSpark
Wie finden Sie diesen Artikel? Helfen Sie uns, bessere Inhalte für Sie bereitzustellen.
Dave von DesignSpark
Vielen Dank! Ihr Feedback ist eingegangen.
Dave von DesignSpark
There was a problem submitting your feedback, please try again later.
Dave von DesignSpark
Was denken Sie über diesen Artikel?
Vollschritt und Halbschritt
Schrittantriebe steuern den Betrieb eines Schrittmotors. Für Schrittmotoren werden allgemein drei Erregungsmodi verwendet: Vollschritt-, Halbschritt- und Mikroschritt-Modus. Diese Erregungsmodi wirken sich auf die Laufeigenschaften und das Drehmoment des Motors aus.
Ein Schrittmotor überträgt elektronische Signale jedes Mal in mechanische Bewegung, wenn ein Impuls an den Motor gesendet wird. Mit jedem Impuls wird die Welle in festen Schritten weiterbewegt. Wenn ein Schrittmotor eine Schrittauflösung von 1,8° aufweist und die Welle im Vollschrittbetrieb eine komplette Umdrehung machen soll, müsste der Schrittmotor 200 Impulse erhalten (360° ÷ 1.8 = 200).
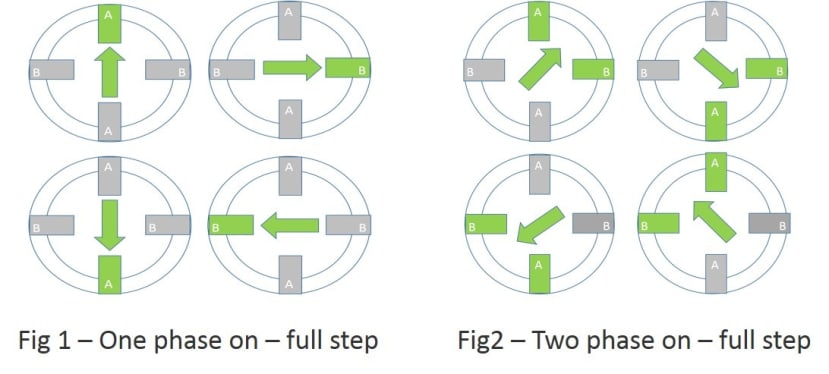
Es gibt zwei Typen von Vollschritt-Erregungsmodi.
1-phasiger Erregungsmodus Vollschritt, Abb. 1: Der Motor wird so betrieben, dass jeweils nur eine Phase unter Spannung gesetzt wird. Dieser Modus weist von allen Erregungsmodi den niedrigsten Treiber-Energieverbrauch auf.
2-phasiger Erregungsmodus Vollschritt, Abb. 2: Beim Betrieb des Motors werden beide Phasen gleichzeitig unter Spannung gesetzt. Dieser Modus sorgt für eine Optimierung von Drehmoment und Drehzahl. Im 2-phasigen Erregungsmodus steht rund 30–40 % mehr Drehmoment zur Verfügung als im 1-phasigen Erregungsmodus, allerdings ist auch der Energieverbrauch doppelt so hoch.
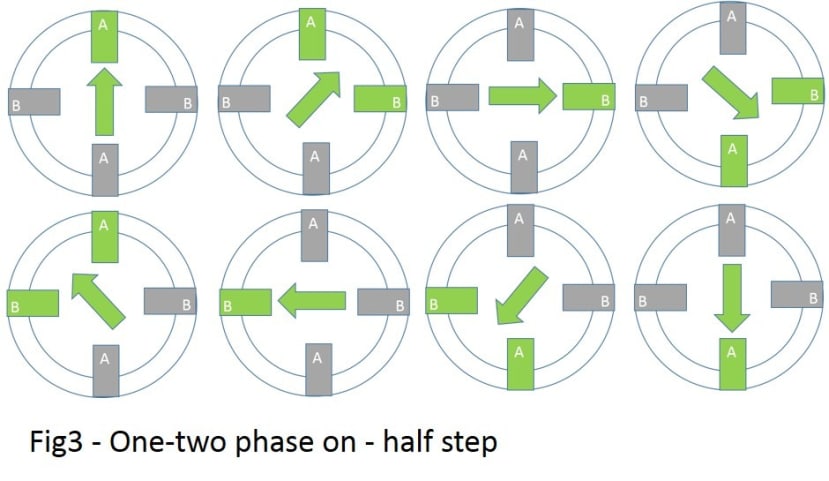
Der Halbschritt-Erregungsmodus ist eine Kombination aus 1-phasigen und 2-phasigen Vollschritt-Erregungsmodi. Daraus ergibt sich der halbe Winkel eines Basis-Schrittwinkels. Dieser kleinere Schrittwinkel sorgt für einen flüssigeren Betrieb, da die Winkelauflösung höher ist.
Im Halbschritt-Modus wird ungefähr 15 % weniger Drehmoment erzeugt als im 2-phasigen Vollschritt-Modus. Allerdings wird durch einen modifizierten Halbschritt-Betrieb der Drehmomentverlust beseitigt, indem die Stromzufuhr zum Motor erhöht wird, wenn nur eine Phase unter Spannung gesetzt wird. Siehe Abb. 3
Mikroschritte für größere Steuerungsmöglichkeit und flüssigeren Betrieb
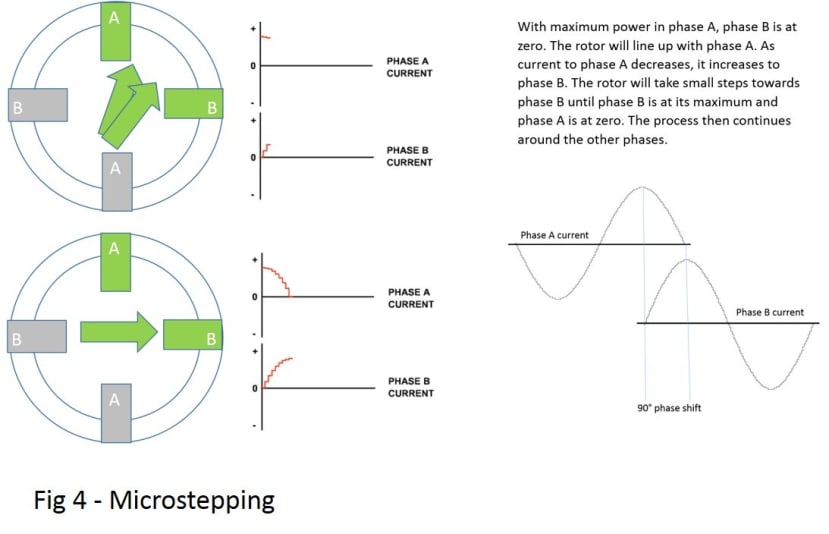
Beim Mikroschritt-Betrieb kann ein Grundschritt des Motors um das bis zu 256-Fache unterteilt werden, sodass kleine Schritte noch kleiner werden. Wird der Strom beider beteiligten Spulen vom Mikrotreiber sinusförmig um 90° phasenversetzt verändert, wird ein flüssiger Betrieb des Motors erreicht. Sie werden bemerken, dass der Motor leise läuft und die Schritte praktisch nicht wahrnehmbar sind.
Durch die Steuerung der Richtung und der Amplitude der durch die beiden Spulen geleiteten Ströme wird die Auflösung erhöht und die Motorcharakteristik wird optimiert, sodass weniger Vibrationen entstehen und er Betrieb flüssiger wird. Da die beiden Sinuskurven sich ergänzen, entsteht eine flüssiger Übergang von der einen zur anderen Spule. Wenn der Stromfluss in einer Spule erhöht wird, nimmt er in der anderen ab, sodass flüssige Übergänge zwischen den Schritten erreicht werden und eine konstante Drehzahl erhalten bleibt. Siehe Abb. 4
Sehen Sie sich unsere neuen Schrittmotoren und Mikrocontroller von Sanyo Denki an, sowie andere hervorragende Produktsortimente der folgenden Marken.

Schrittmotoren von Top-Herstellern bei RS erhältlich
e.g.
(535-0401)
e.g.
(829-3525)

e.g.
(044-0262)

e.g.
(877-7247)
e.g.
(337-3727)

e.g.
(793-4127)