What is the difference between shielded & unshielded proximity sensors ?
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Select a proximity sensors
Inductive Proximity Sensors are great for detecting metallic objects. There are many uses for them in different types of industrial applications such as material handling and conveying.
In a recent application case, a major conveyor manufacturer put together a material handling solution for a large retail distribution centre. In this operation, inductive proximity sensors are used to detect diverters operation on conveyors. The challenge comes when the space available for installing inductive proximity sensors is limited and reduced compared to a standard installation. For these types of applications, a flat format factor range can be used.

Besides providing an easy integration into the machine thanks to its flat body and small housing, a major advantage is that you do not need to mechanically adjust the position of the sensor to ensure detection. This also makes product replacement much easier and faster. And for the most demanding applications, a flat range brings increased sensing distance and a teach mode that allows the sensor to learn its environment. Thus, the sensor will ignore fixed metal parts so the output will only change state when the desired moving parts are detected.
Example of inductive application: Parallele travel control (2.23min)
Shielded vs unshielded
A sensor has a field which extends around the front surface to the sides of the product. If metal is brought into the field without triggering the output, the sensing distance and pattern of the sensor will not be predictable.
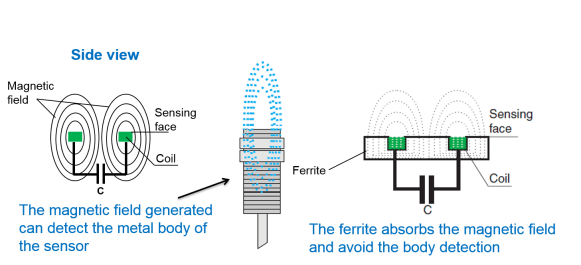
You may recall that the amount of metal in the field is what causes the sensor to trigger, and if there is already metal in the field before the target enters, the field is preloaded, causing the target to be sensed prematurely. Common situations for having a preloaded field are when the sensor is mounted in metal or when metal is in the background. Because most of the time the ability to mount a sensor in metal is desirable, we need to cancel the influence of the metal preloading the field. If we introduced metal into the field in a controlled manner (by incorporating it into the sensor itself), the sensing pattern becomes predictable.
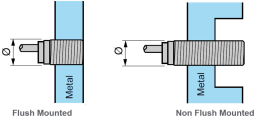
This sensor can now be flush-mounted. This type of sensor is called shielded, as opposed to non-shielded.
You should note that the shielding that makes flush mounting possible also reduces the sensing distance. Plastic sensors can also be shielded. As with sensors having metal bodies, the shielding is on the inside of the housing.