古い飛行機のロータリーインバータシステムを構築!Part3:最終組み立てとテスト
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
制御装置と筐体の組み立てを終え、配線を完了させ最初のテストを行います。
パート2ではロータリインバータの制御方法、界磁巻線を駆動するための定電流電源の設計、フロントパネルのモックアップを作成しました。今回はフロントパネルのレイアウトを決定し筐体を製作します。そしてすべての制御機器を配線し、重要な初運転を行う予定です。
コントロールレイアウトの最終決定

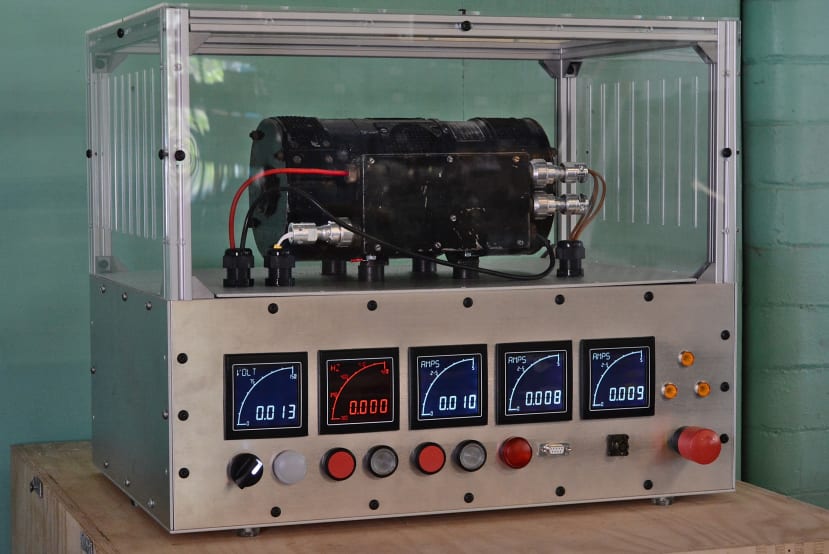
Part2でモックアップを作成し、検討を重ねて満足なレイアウト構成に変更と制御系を追加しました。発電機の出力位相が一目でわかるように、3つのネオンランプ (237-0430) を追加し、本来の三相出力コネクタ(背面パネルに移設)を外部非常停止ループ用コネクタに変更しました。
パネルのサイズはMDFシートの上にすべての部品を十分な間隔で並べて正確な検証を行い、大まかなサイズを決定しました。今回の場合構成部品が手元にありましたので良好にサイズ感を知る事ができました。3DCADでの3Dデータでもサイズ感を得る事は可能ですが、問題を見落としてしまったりする可能性が有りますのであまりお勧めできません。

また配線は思った以上に場所を取るので3Dモデルには騙されないように注意しましょう。ここでもまた、上記の3Dモデルがあてにならないという点が強調されます。インバータの定格電流はDC28V、55Aなので比較的曲げ半径の大きい16mm²の電線(この太さは少々やりすぎかもしれません)を使いましたので、配線する際には多くのスペースが必要になりました。
筐体の組み立て
全ての寸法を確認した後、アルミパネルはレーザーカットを行うために業者に送りました。筐体の残りの部分は20mm正方形アルミニウム形材 (850-8470) で構成されています。さらにロータリインバータの中が見えるようにするためにアクリル板を設置し、保護もしました。内部を可視化し、内部の変化を確認する事はモータの回転数の変化をさせるときにとても重要になります
構成部品配置に確信が持てなかったので、部品の固定にはファスナー用の穴は無しでパネルを設計しました。穴は部品の配置が完全に出来上がってから開けられるように、穴の中心をスコヤを使ってマークし、穴あけのセンターポンチを行いました。配置を最終決定し穴をあけた後、カウンターシンク (508-8982) でエッジのバリを取りました。これは切り傷の原因となる鋭いエッジを取りのぞくだけでなく、ファスナーの頭部がパネルに対して平たくなるようにするためです。
一部のコンポーネントを取り付ける他の方法が無いのと電源や信号を分配する端子などの使い勝手を考えて、2本のDINレールを筐体の内側に取り付けました。
配線

構成部品の配置が決まったところで、配線を開始しました。前回のプロジェクトでも紹介したように配線計画は非常に重要です。配線計画が適切であれば取り返しのつかない問題は回避できます。
しかし、実際に配線を始めると当然のことながら配線の仕方が変わってきます。ある配線は削除されある配線はルート変更され、当初は必要ないと思っていた部品を接続するために追加されることもありました。例えばDINレールに取りつけた配線は非常停止回路が遮断された時に入力コンタクタの電源をカットする信号を送るものです。

全ての配線が完了すると各接続が配線計画通りに行われているか、すべての接続が適切に接続されているか(断線してないか)、電源レールも短絡していないかを点検しました。そしていよいよ主電源を投入することにしましたが、幸いにも予想通りに機能しました。フロントパネルのメータが全て点灯し、2つのPLCがオンラインになり電流源の入力に36Vの電源が供給されていました。
制御ロジック
全ての配線が完了し、1回目のスモークテストにも合格したところで制御ロジックの考案に取り掛かりました。動作原理はPart2で説明しましたが、いくつかの変更が必要であることに気づきました。例えばロータリインバータの起動時には発電機界磁も少し始動して出力電圧を発生させるようにし、パネルメータを有効化させてフィードバックループを閉じるようにする必要があります。
最終決定なプログラムのロジックは以下の様になりました:
- モータ界磁電流の印加
- いくらかの発電機界磁電流を印加
- モータ電気子電流を印加
- モータ界磁電流を変化させて発電機出力周波数を調整
- 発電機界磁電流を変化させて発電機出力電圧を制御
- 出力が有効(115Vac、400Hzのレギュレーションを達成)な場合、要求に応じて出力接触器を閉じる
2つのPLCを制御するためモータ制御PLCをmain、発電機制御PLCをsecondaryとしmain PLCはシステムの起動と全体の制御を行い、secondary PLCにイネーブル信号を出力し、secondary PLCが出力電圧を調整します。
プログラミング言語にはBARTH社が提供するグラフィカルな環境の“miCon-L”を採用しました。他のグラフィカルプログラミングツールを使用したことがある人なら親しみを感じるような設計になっています。
右側の「ライブラリ」ペインにあるプログラムブロックは、リスト項目からではなく上部にある可視ブロックからドラッグするなど、プログラミング環境としてはわかりやすくレイアウトされていますが少々癖があります。

これを踏まえてイネーブルと緊急停止ロジックから制御系を構築していきました。ここでも左が入力、右が出力という論理的と思われる順序に従うとすっきりします。このように信号の流れを定義する事はデバッグの際にもプログラムの流れを追うのにとても役に立ちます。
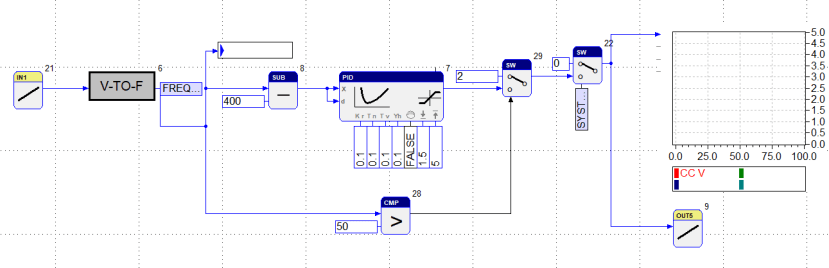
またPIDコントローラを実装したブロックも用意されており、今回は2つ使用しました。出力周波数調整用としてモータPLCに1つ、出力電圧調整用として発電機PLCに1つの構成です。PID制御ブロックを理解するのにしばらく苦労しましたが、このフォーラムの投稿にブロックの使い方が詳しく書かれていました。外部エラー信号を生成する必要があり、私たちの場合は周波数入力を取って400を除算する必要がありました。

全てのロジックが実装されたので実際のハードウェアでテストする前に、システムの動作をシミュレーションすることにしました。便利な事にmiCon-L環境にはシミュレータが内蔵されており、入力のシミュレーションと出力のモニタが可能です。これはモータをオーバーヒートさせて損傷させる可能性があるため、最初に行うべき重要な作業です。またインバータがオーバースピードになり飛散する可能性もあります。
モータと発電機のPLCロジックを実装しシミュレーションを行った後、実際のハードウェアを使ったテストに移りました。まずは両PLCのプログラミングを行い、その後電機子電源の無い状態でのシステムテストに移行しました。これはロジックの動作や入出力が正しく接続されているかどうか検証するためです。
PLCの動作状況もmiCon-Lソフトウェアから観察することができ、入出力がリアルタイムに反映されます。プログラムのパラメータは実行を停止しなくても更新され、再プログラムされます。これはPIDループや制御値などのチューニングに非常に有効です。今回のケースでは2つのPIDループを調整し起動時のフィールド電流など、多くのパラメータを調整しました。

その他、数値を表す他の有用なツールも提供されています。例えばオシロスコープのように時間軸で入力する「トレンドライター(Trend-Writer)」ブロックなどです。これを2つ追加して発電機の周波数と界磁電流を指令する制御電圧を表示し、デバッグを支援するようにしました。
テスト
プログラムが実機で確認できたので、ここは思い切って同僚が作った大電流28V電源を接続する事にしました。
この最初のテストは問題があった場合電源が80A以上の電流を供給できてしまいロータリインバータが未知の状態になってしまう事と「正しく」制御するための情報があまりない事(ゴーカートの大型「sepex」DCブラシ付きモータを制御した実験から推測しました)などで、非常に不安な気持ちで臨みました。
最初のテストではモータを恐ろしい速さで加速し、最終的に450Hzを超える出力を発生させました。その際にオーバースピードの安全装置を作動させ、インバータへの全電源を切断しました。これはPID制御ループのチューニングが必須であることが判明しました。その後、様々なパラメータを変えて数回動作させましたが大きな効果は得られませんでした。


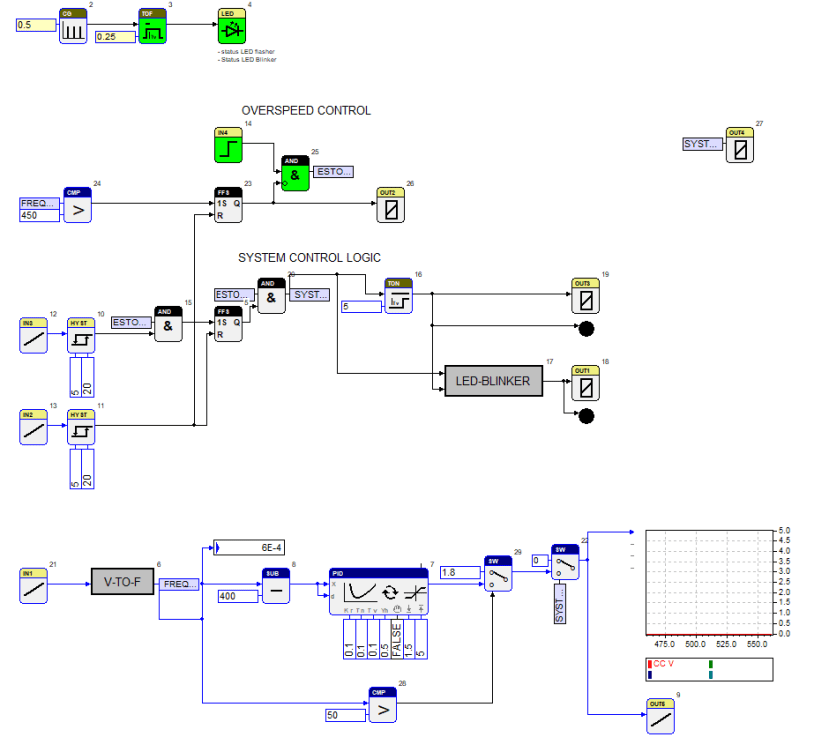
最後に手動でモータの界磁電流を低くしたり高くしたりして、2つのテストを行いました。これの目的は界磁電流の変化がモータ速度に影響すること、つまり、より高い界磁電流は最初はモーターをより短時間で加速させるけれどその後より遅くなる、およびその逆が起こるのを確認するためでした。上の2つのグラフは界磁電流を変化させた時のインバータの加速度にどのような変化が出るかを示したものです。
今後は出力電圧と周波数を完全に調整できるように界磁巻線を正しく制御する方法についてさらに調査し、出力を安定させるために追加でPIDループのチューニングを行う必要があります。
テストの様子
まとめ
このプロジェクトは大電流が流れ危険が伴ったり、ものが動作しバラバラになる機会が多くありましたが開発の古臭い感じがとても楽しいものでした。
またBarth lococube STG-820 PLCの柔軟性とプログラミングのしやすさは、驚くべきものでした。パラメータ容易にを変更できる事でロータリインバータの動作にどのような影響があるかをすぐに試すことができ、開発をよりスムーズに行う事ができました。
ハードウェアのプラットフォームができたので今後はその上に適切なソフトウェア制御を構築し、出力を安定化させて他のプロジェクトを実行できるようにすることを目指していきます。
このプロジェクトの別の記事はこちらで確認できます。
>Part 1 - 原理と制御系
>Part 2 - 組み立て編