UAV Based System for Detection and Sampling Micro-Plastics and Particulates in the Atmosphere
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?

In most recent years, micro-plastics have become a heavily investigated topic. However, recent studies have shown a significant increase in the distribution of said particulates in more remote locations. Thus, the hypothesis is that the movement of these microplastics is due to atmospheric channels. Therefore, we demonstrate and develop a Microplastics collection and sampling UAV within this paper. This UAV consists of an Integrated companion computer that reads data from an SPS30 particulate sensor. Moreover, the UAV is also fitted with a custom particle filtration unit used to collect ten separate samples at different altitudes. At the time of publication said UAV proof of concept has concluded where indoor testing has verified the effectiveness of detection and sampling. This has been done by carrying out multiple indoor flight tests where different types of particles were incorporated into the surrounding environment.
1 Introduction
1.1 Problem Definition
Microplastics have become a heavily investigated and prevalent field that scientists have been investigating. This is due to single-use plastics and the insurgence of large-scale industrial systems dependent on plastic use. This was first noticed within the 1960s when Kenyon and Krindler (1969) spoke upon small 10-24mm plastics being found embedded within coastal wildlife. However, as the research has matured, the prevalence and impacts of microplastics within the atmosphere have been noted. More specifically, in recent years, atmospheric microplastic has been investigated to allow for a greater breadth of knowledge within this field (Can-Guven, 2020). Moreover, due to plastics being non-biodegradable in nature, the resulting concentration of plastics is increasing, where the rate of increase is currently unknown. However, even though acknowledgement within communities and governing bodies has increased over the years, as have microplastic treatment plants (Sun et al., 2019), the full scope of the issue is still unknown. This can be seen by the current study by (Batool et al., 2021), where an estimate of 17,000 tons of tyre wear is annually released. Furthermore, as the field matured, a clear definition of microfibers in the atmosphere is needed Figure 1. This data is the primary aim of this project, as it will allow scientists to better understand where the pollution is coming from and what techniques can be used to alleviate it.

Figure 1 - Classification of fibre types
1.2 Concept
To define the fibre types, sampling at different altitudes will need to be done. Thus, the proposed solution of a microplastic sensing and sampling UAV was hypothesised. The concept of utilising a UAV for sampling the air at different altitudes with relatively high amounts of control could revolutionize vertical applications. A good example of UAV utilisation for vertical missions is the 60% cost reduction in bridge inspection due to the Skydio 2. This cost reduction has thus had a positive affect on the UAV market where a predicted compound annual growth rate (CAGR) of 55.2% is expected in North America between the years 2021-2028, (Grand View Research, 2021).

Figure 2 - UAV market analysis (Grand View Research, 2021)
Additionally, due to the relatively low cost of developing said UAVs, the authors decided this was the perfect utilisation of aerospace disciplines. Moreover, it was also conceptualised that the propulsion units onboard the quad motor UAV could be utilised for air sampling. This would be done by recycling the downwash produced by the propellers to be a useful mass flow rate through the onboard sensors and filtration units, Figure 3. Therefore, this utilisation was chosen to be the most promising characteristic of using a quad motor UAV as recycling already developed airflows could result in a highly efficient sampling technique.

Figure 3 - Conceptual UAV filtration setup
2 Literature Review
Airborne microplastics have been declared a potentially hazardous material that can lead to severe underlying health conditions. The leading drivers of airborne microplastic toxicity are their size, shape, absorption properties and pathogens (Wieland, S. et al., 2022).

Figure 4 - Comparing microplastics to other airborne microparticles (wieland, S. el al. 2022)
The challenges of deriving these driving factors are evident as there are gaps in understanding of microplastic emission terrestrial ecosystems, especially concentration. This lack of understanding is primarily due to key research areas yet to be evaluated. Moreover, it is stated by Batool, L. et al. (2021) that policy and executive actions with the addition of resolving problems associated with microplastic pollution need to be at the forefront of ecological studies. This has primarily been due to the terrestrial ecosystem directly affecting marine life and marine ecosystems.
Furthermore, from research, it is evident that the short term effects of microplastics on marine life are catastrophic; however, the effects on larger organisms like humans are still unknown. Akanyange, S.N. et al. (2021) evaluates the possible short- and long-term effects microplastic may have on humans, as seen in Figure 5. Thus, it is concluded that engineers and scientists alike need to proactively mitigate these effects by better informing themselves and others of the causes and risks of microplastics.

Figure 5 - Potential short and long tern effects to humans (Akanyange, S.N. et al. 2021)
Lastly, collecting and characterizing microplastic techniques are being developed, as seen within Rahman, L. et al. (2022) review. Additionally, high-risk area mapping of microplastics within China (Zhu, X. et al. 2021) are being conducted but is limited to ground level testing of 1.6 meters. Thus a proposed solution for efficiently sampling airways at multiple altitudes needs to be developed for a plethora of data analysis.
3 UAV development
3.1 Filtration unit design (Sampling)
The purpose of the passive particle filtration unit (PPFU) design is to allow for sampling during the mission. The design concept works in the same manner as a conventional impact filter, where the airflow is concentrated through a channel and impacts a sample material, thus, depositing particles. Moreover, the PPFU was also designed to allow for multiple samples to be collected during a single mission, therefore, a circular design was developed which allowed the pilot below to change what section of the sample paper would be exposed to the airflow at different altitudes or locations.


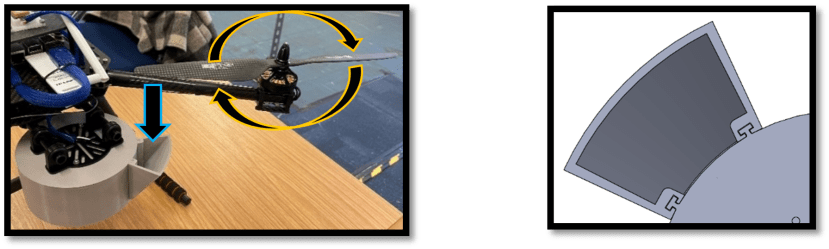
Figure 6 - PPFU design
3.2 SPS30 (Detection)
For particle detection, a Senspirion SPS30 was integrated into an onboard RPi 3B+. This device allowed for particle mass concentration (Pm) from 1.0 to 10.0 and particle number concentration (Nc) from 0.5 to 10.0. This as well as other key integrated systems may be seen in figure 7.

Figure 7 - Systems integration
3.3 UAV platform
The final design of the UAV may be seen in Figure 8. This design resulted in a total gross weight, including a battery of 2.2kg, of which 700g is the battery. Crossfire telemetry was implemented in the UAV, which resulted in a 40km range for pilot control. Moreover, Telemetry via the TP-link implemented to the RPi allowed constant telemetry feedback to the ground station up to 100m. The telemetry link was utilised for live date stream from the SPS30, servo motor control, flight data and backup control encase of an emergency. Additionally, even with the sizeable overweight battery, the UAV's disk loaded comes in at 6.422, well under the recommended range of 7-12. With this efficient disk loading, the flight time was 27 minutes during indoor endurance. However, with this data known, the authors would suggest the implementation of Lithium-ion batteries instead of the LiPo used as Lithium-ion has a much high power density. This was not done with this project due to resources; however, is relatively simple to implement due to the modularity of the battery connector. It is essential to note that the design is for 6s batteries, and 4s batteries will result in a less efficient, sluggish aircraft.

Figure 8 - UAV design
4. Results
The UAV effectiveness of sampling and detecting was tested during indoor flight tests. The first flight test incorporates two separate dust samples into the environment during flight. The results for this indoor flight may be seen below in Figure 9.

Figure 9 - Indoor dust test
from these results, it is clear that two spikes were recorded, which correlated to the time that the particles were introduced. These spikes can be seen in Figure 9, label dust sample one (DS1) and dust sample two (DS2). The authors also noted that the SPS30 data spike was not at the magnitude that would be expected for the introduced dust sample. This was hypothesised to be due to the size of said particle introduced to the environment being too large for a large magnitude of detection.
Thus, a final indoor test was conducted. Said test involved introducing finer particles into the environment that the UAV is hovering in. However, to ensure this test was safe, the authors ensured that the particles introduced into the environment were none toxic and did not comprise of any material that could further pollute the environment. Additionally, the authors also wanted to see at what distance the UAV would be detected said particulates; therefore, there needed to be a controlled way of adding the particles to the environment in a specific position. To solve all of the spoken limitations, the users utilised a household aerosol can, which should theoretically disturb the same amount of particulates in the exact location with high repeatability if active for the same duration within the exact location.
Lastly, the authors choose to add particles to the atmosphere in three intervals, all at different distances from the UAV. The authors tested the UAV detection capabilities at 7.5, 4 and 1.5 meters away from the UAV during flight. Said results of the above test can be seen below in Figure 10.

Figure 10 - Indoor aerosol test
From the data collected within this test, it is clear that the hypothesis that the SPS30 detects extremely fine particulates was correct. The authors have annotated Figure 10 to display when the particles were added to the environment where S1, S2 and S3 are at 7.5, 4.5 and 1.5 meters, respectively. From these annotations, it is clear that the SPS30 detected both the 4.5 and 1.5-meter samples with great success. The SPS30 did not detect the 7.5-meter sample; however, the authors can confidently say that the SPS30 samples a 63.52m^2 area based on the 4.5-meter radius detected.
Moreover, during the indoor dust test, the PPFU was equipped with an adhesive material to verify that the UAV was sampling the surrounding environment. This adhesive material used within this experiment was household Sellotape within the passive sensor. The Sellotape was then sealed within a Crime Scene Investigation (CSI) tab to prevent cross contaminants due to molecular masses bonding to the tape. After the indoor dust test, the samples were retrieved and then assessed.
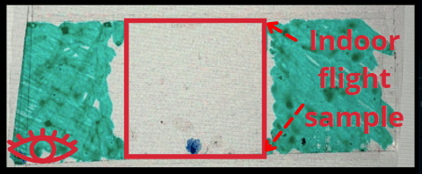
Figure 11 - Indoor dust test sample material after test
Two Microscopes were utilised to analyse the sample collected during the indoor detection and sample test. At first, the sample was analysed with the lab microscope with the range of 5x-100x and then secondly analysed using a digital Microscope with the range 20x-400x. Both methods were used as the lab microscope was the first microscope the authors had access to. However, the digital microscope was primarily used to analyse the sample and will be disused further within this section. The results concluded that the PPFU successfully collected particulates. The results visually display what is assumed as fibre strands and micro-plastics. We can further investigate the composition and quantity of the results collected from the PPFU. The figures below display a black particulate with a measurement of 225 ×160μm. The PPFU also collected thinner low mass particulates estimated to have a geometry of 10× 320μm. The authors can cross-reference samples with mass and number concentration from the result found with the SPS30 and the PPFU sample. Thus, conclude if high mass and number concentration areas contain harmful microplastic or just natural fibres.

Figure 12 - Digital microscope sample analysis
5. Recommendations for Future Work
5.1. Modular Funnel Design and CFD
The investigation of the aerodynamic flow conditions can further influence the geometric design of the funnel. By analysing the flow conditions, aerodynamic implementational designs could be used to control flow behaviour to assess how the particulates can be collected and optimised to improve the sampling of the particulates.
Factorising the design implementation of the funnel and the PPFU design by varying the funnel and the cross-sectional area of the geometry of the PPFU inlet would idealise a theoretical estimation of how many molecules can be collected. Furthermore, the lattice structure of the mesh could be further analysed to evaluate the impact of the flow distribution across the filtration by optimising the geometry and the density of the lattice structure. Finally, CFD analysis would verify the ideal mass flow rate to attain the ideal pressure distribution for the design implementation.
A Method such as male and female dimple indentation design, aspired by a golf ball to re-energise the flow of the boundary layer within the funnel. Equilibrial dimples can be created to investigate this effect alongside different geometrical design variations. A further adaption of the investigational method is to evaluate the dimple design by developing variable dimple designs by refining the dimple sizes to the region where the particulates would want to be concentrated the most. Discrete Element Modelling (DEM) could also be used to assess the behaviour of the particulates, coupled with CFD; this would assess the behaviour of the particulates within the funnel to understand and optimise the overall aerodynamic motion.
For future analysis of the number of particles at a given altitude, the PPFU may be utilised. This utilisation would be assessed by calculating the mass flow rate entering the PPFU at a given altitude. This mass flow rate could be used with the time duration at the given altitude to calculate the total amount of molecular mass passing through the PPFU. This value then is compared to the number of particles collected during the sample tracking thus the engineers can say with confidence that the number of particles per meter cubed for a given area.
5.2. UAV Design
For future development of this aerial platform, the authors recommend the following be considered. The battery used was a 5000mAh 6 cell Lithium polymer soft case battery from Hobby King initially used for FPV. Although the battery used should have theoretically provided enough power for a flight time above 30 minutes. The battery used was towards the end of its designed life and therefore could not store the original capacity, thus reducing the flight time. The authors recommend that the power supply be optimised with the rest of the UAV. To do this, the author recommends that the continuation team consider using a Lithium-ion battery pack.
The Current lidar system is the Benewake TFmini-s. This lidar system is an excellent addition to the UAV. The system is lightweight and reliable, with capabilities beyond most competitors in the same price range; however, the TFmini-s does have one drawback. The systems range, 12 meters, is limited to approximately 10% of the intended flight altitude. The system then becomes redundant to other systems beyond this range. To advance on this, the authors recommend a lidar with a greater range, such as the TF03 lidar by Benewake. This lidar system would allow for accurate altitude control throughout the entire flight up to the maximum altitude of 120 meters and would exceed that to leave future scope for other purposes.
The flight computer for this project, the Kukute F7, was genuinely brilliant and easy to use. However, some aspects of the system were undesirable. A flight computer with a more modular set-up such as the Pixhawk would remove much of the soldering and increase interchangeability through the design for rapid changes of sensors and easier working conditions in the UAV.
Another less desirable attribute of the Kakute was the lack of a current and voltage sensor on the printed board. The authors in future would recommend considering the AIO version of the board to remove the imprecise nature of the sensors in the ESC. This recommendation would remove the need for such a complicated ESC and simplify the design from a systems point of view. The authors highly recommend arranging an outside testing area to solidify the stability characteristics and efficiency of the aerial platform.
6. Conclusion
This project concludes with a fully developed UAV platform capable of sampling and detecting airborne particles within a 63.52m^2 area between the altitudes of 10 and 100 meters. Said platform has been proven to have vibrational and magnetic field stability where appropriate GPS and RC failsafe have been implemented and tested. Moreover, this stability was further improved within this design by implementing an optical flow and Lidar sensor. The UAV weighs 2.2kg; however, it has additional payload capability up to an MTOW of 3.5kg. The current transmitter and receiver maximum range is 40km, where a 100m WIFI telemetry feed has been set up for continuous data during the 10-100 meter mission. Additionally, the UAV disk load is 6.422, allowing for a 27-minute indoor flight with a single non-optimised 6s LiPo battery.
The indoor sampling and detection tests show great promise for outdoor detection and sampling. The SPS30 implemented on the UAV detects both large dust particles and fine dust particles within the surrounding environment. However, the results of these experiments would indicate that smaller lower-mass particles are far more likely to be detected with the SPS30. Additionally, the passive particle filtration unit (PPFU) custom-developed to utilise recycled propeller airflow showed promising results for outdoor sampling. The PPFU successfully sampled an array of different-sized particles from the indoor sample test. Moreover, the PPFU has been proven to collect airborne particles where the size of said particles can be seen to be 150μm.
Furthermore, the integration of an onboard Companion Computer has been utilised for secondary ground control and control of the onboard systems and sensors. This integrated CC functioned as intended and is compatible with the obstacle avoidance algorithm shown within this report. This algorithm has been proven to work within the digital testbed developed within the project and would be recommended to be implemented if the project became a commercial product.
Finally, to conclude this project, the authors would like to state that utilising multiple different techniques and disciplines has benefited all participants involved. This project will be seen as a legacy of the author's achievements throughout their academic journey. The possible future implications that this project could have on society are vast, and with the appropriate support and encouragement, this project could be seen in the near future improving the air quality across the world.
References
- Kenyon, K.W. and Kridler, E. (1969) Laysan Albatrosses Swallow Indigestible Matter. The Auk. 86 (2), pp. 339–343. doi:10.2307/4083505.
- Can-Güven, E. (2020) Microplastics as emerging atmospheric pollutants: a review and bibliometric analysis. Air Quality, Atmosphere & Health. doi:10.1007/s11869-020-00926-3 [Accessed 11 November 2020].
- Sun, J., Dai, X., Wang, Q., van Loosdrecht, M.C.M. and Ni, B.-J. (2019) Microplastics in wastewater treatment plants: Detection, occurrence and removal. Water Research. 152 pp. 21–37. doi:10.1016/j.watres.2018.12.050 [Accessed 15 April 2020].
- Batool, I., Qadir, A., Levermore, J.M. and Kelly, F.J. (2021) Dynamics of airborne microplastics, appraisal and distributional behaviour in atmosphere; a review. Science of The Total Environment. pp. 150745. doi:10.1016/j.scitotenv.2021.150745 [Accessed 11 November 2021].
- Grand View Research (2021) ‘Commercial Drone Market Size | Industry Analysis Report, 2019-2025’ [online]. Available from: https://www.grandviewresearch.com/industry-analysis/global-commercial-drones-market.
- Wieland, S. et al. (2022) From properties to toxicity: Comparing microplastics to other airborne microparticles. Journal of Hazardous Materials. [online]. 428, p.128151.
- Akanyange, S.N. et al. (2021) Does microplastic really represent a threat? A review of the atmospheric contamination sources and potential impacts. Science of The Total Environment. [online]. 777, p.146020.
- Rahman, L., Mallach, G., Kulka, R. and Halappanavar, S. (2022). Microplastics and nanoplastics science: collecting and characterizing airborne microplastics in fine particulate matter. Nanotoxicology, pp.1–26.
- Zhu, X., Huang, W., Fang, M., Liao, Z., Wang, Y., Xu, L., Mu, Q., Shi, C., Lu, C., Deng, H., Dahlgren, R. and Shang, X. (2021). Airborne Microplastic Concentrations in Five Megacities of Northern and Southeast China. Environmental Science & Technology. [online] Available at:https://escholarship.org/content/qt6vf7v59s/qt6vf7v59s_noSplash_470832c8a3d7158f5ba26c9914eb4a88.pdf?t=r1mv2z.
Comments