Student Project Competition: 3D Printed Animal Mobility Device
Follow project
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
 At the Handprints e-NABLE Scotland animal mobility division we have set our minds onto helping a walking impaired dog fend itself. We started out with many sketches which will soon turn into a fitted animal walking device to help Monty.
At the Handprints e-NABLE Scotland animal mobility division we have set our minds onto helping a walking impaired dog fend itself. We started out with many sketches which will soon turn into a fitted animal walking device to help Monty.
Our Team and Initial Brainstorming
Handprints e-NABLE Scotland is a non-profit student-led society at The University of Glasgow. At Handprints we strive to apply the design and project management skills learned throughout our degree courses to help those in need, mainly producing 3D-printed prosthetic devices for children with upper limb deformities. We fundraise in order to be able to provide these prosthetics free of charge as we bear in mind that these might be too costly to afford for a constantly growing kid. Within this society we have the Outreach division, within which the animal mobility team resides. We are Megan, Rachel and Lucia, the members forming this team; we look forward to seeing this project through and restoring mobility to our recipient. Monty (Figure 1) is a 5-year-old walking impaired dog with an inoperable limb deformity as well as gradually worsening arthritis which makes it harder every time to use his front legs. Even with this issue, he is a very happy dog who loves going outside and running around. We aim to help him do what he loves without constant pain.

Figure 1: Monty - our canine recipient
Our team was first formed at the start of this academic year, in September 2020. All 3 of us were selected to form part of this year’s Outreach Division and, after learning that the previous animal mobility project did not come to an end, we decided to form a new team with fresh ideas and a drive to ensure our skills went a long way in aiding animal mobility.
Project initiation was a challenging process, often involving several weeks of outreach contact with animal clinics and vets, both within the UK and abroad, with very little response. Realising that recipient sourcing would take some time, we decided to push our CAD design skills to new heights. After some brainstorming, we decided to create a prototype of a structure which would be able to pull small animals (such as cats or dogs) up if they were unable to support themselves due to a heavy weight or leg injuries.
As shown in Figure 2, the prototype consisted of a strong horizontal pipe supported by two other vertical pipes. Although the main idea was clear: the animal would be wearing a harness, which would be attached to the top horizontal pipe and pull it upwards, we were faced with the challenge about which way to support the structure from the side view. As seen on the sketch, we came up with 2 possible ways, testing of the prototype would have been needed in order to decide which method would be sturdier.
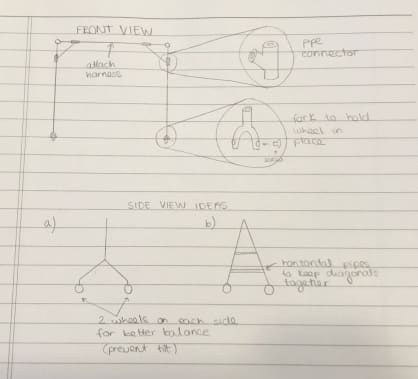
Figure 2: Initial prototype sketches
From Sketches to Prototypes
Following our tireless contact efforts, we gladly received a response from a vet at the Small Animal Hospital from the University of Glasgow. Our new collaborator told us about Monty and his condition, we instantly became driven to help him out and got back to brainstorming. It took much research and many meetings to tailor our previous ideas and designs to Monty’s needs. Due to COVID-19 all this work had to be done remotely, which meant meetings took longer as ideas were harder to get across.
We decided the best approach for aiding this dog would be to create a cart. In order to produce this walking device, 3 distinct parts were needed:
1. PVC pipes are the skeleton of this structure. Due to its durability and strength, we believe this material to be the best option to support Monty and ensure optimum device support. Our plan is to use 1/2-inch sized pipes, which have an outer diameter of 13/16-inches and inner diameter 5/8-inches. In order to be eco-friendly and reduce the amount of waste generated, we have decided to reuse these materials from last year’s project, that way making the design more cost-efficient and preventing throwing away the unused device.
2. Pipe connectors were designed by us using the computer-aided-design tool we have been taught at university: Fusion360. We are 3D-printing these parts using PLA filament which will allow us to fit the PVC pipes and connect them in the desired arrangement. Figure 3 shows our various connector designs, each specialised to facilitate various pipe arrangements for extension.
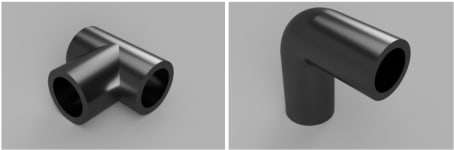
Figure 3: (a) T-type connector; (b) L-type connector
3. Wheels will enable Monty to propel himself forward with minimal effort by providing additional body weight support. To maintain wheel stability, we have designed on CAD a suspension fork using Fusion360. As shown in Figure 4 it has a tube-like exit at the top which facilitates attachment to the PVC pipe, as well as smaller holes on the sides of the fork in order to screw the wheel in place. Like the pipe connectors, this component will be 3D printed using PLA filament.

Figure 4: Fork for wheel attachment
Our team has designed 2 different prototypes in Fusion 360:
Prototype 1:
As shown in Figure 6, the first design has wheels which would sit either side of Monty’s front legs; the forks attached to the wheels allow for rotation without hindrance. The top bar will sit along Monty’s back and the two parallel PVC pipes will be sewn onto a harness which will distribute the pressure along his whole back to maximise comfort. Once Monty’s dimensions are finalised and received, we intend on buying both the wheels and the harness online. It is also being considered whether to use two or four wheels, shown in Figure 6, to maximise Monty’s whole-body stability.
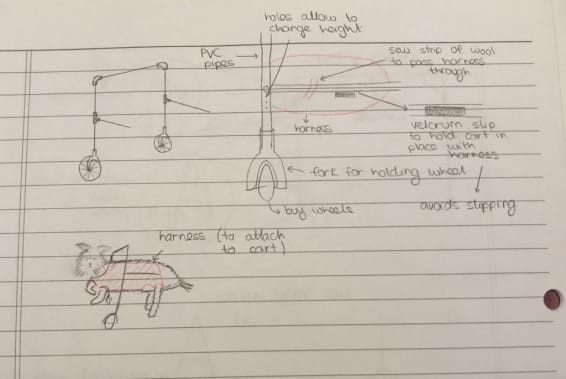
Figure 5: Prototype 1 sketches

Figure 6: Prototype 1 CAD designs with (a) two wheels and (b) four wheels
Prototype 2:
Prototype 2 (Figure 8) consists of a cart with a curved top to fit comfortably with the shape of Monty’s back. It is connected to the main bars via L-connectors and fitted with wheels which would sit on either side of Monty’s front legs. Due to the fact that Monty’s measurements are still unknown, this design was made adjustable by adding a connector with holes placed at different points along its length. This is so that the height of the wheels can be adjusted based on what is most comfortable for Monty. The connector can also be moved along the bar so that we can find the optimal position before locking it in place using screws. Similar to Prototype 1, Prototype 2 was designed with the intention that the bars would be attached to a harness.
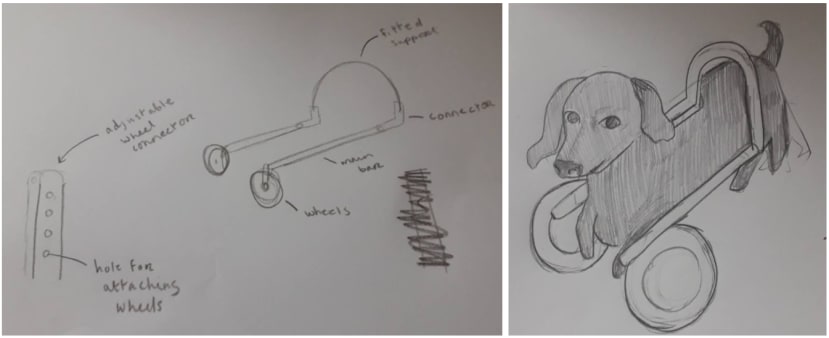
Figure 7 (a) and (b): Prototype 2 sketches

Figure 8: Prototype 2 CAD design
Previous team's design:
The 2019-2020 designed dog cart was custom made for a dog with arthritis in its back legs. The team tested out different types of fabrics to see whether they would provide enough support. The two main aims were to use readily available materials and allow for as much adjustability in the design as possible. Therefore, it was chosen to use PVC pipes for the main body and joints of the cart, keeping the cart lightweight and offering the flexibility of frame size. For this initial model, the team opted for dense foam “leg rings” that were commercially available to support the dog’s back legs. Upon construction, it was discovered the wheel supports rotated as the cart was in motion: creating a triangular support with a wooden dowel solved this problem. The security of the harness could have been improved by creating a groove in the pipe for the fabric loops to sit in. Overall, the team was pleased with this prototype as they created a functioning design whilst satisfying the initial aims and learnt about the support and other attachment improvements required in order for use by a recipient.

Figure 9: Last year's discarded project
Next Steps
After meeting with Monty’s owners, it was decided to test both prototypes to ensure optimal comfort and ease of use for Monty. We are currently awaiting Monty’s dimensions which will allow us to properly scale the device. Once this has been achieved we will be able to go into trying both prototypes on Monty, ensuring that his reaction to each walker is carefully noted by his owner and ourselves to select the most appropriate prototype for final production, making adapting to the device less challenging.
Based on the feedback from last year’s team we also plan on adding wooden dowels or something similar to add a triangular support which will prevent unwanted rotation of the wheel supports. We also plan on adding indentations along the PVC pipes where the loops of the harness will sit.
After this project, we hope to be able to grow and develop the team into helping animals with similar disabilities to Monty, using our walking device as the standard design. We will use these files to explain to different clinics and owners how we would be able to aid their pets, adapting the design to needs based on specific cases. We strive to work alongside the Myoelectrics Division at Handprints e-NABLE Scotland and find a way to remotely control the cart in case other animals are not able to propel themselves due to other conditions such as paralysis.
Even though we are a division of a student prosthetics society, we are 100% driven to utilise our skills as Outreach Division members and budding engineers to advance the wider cause of low-cost animal walker design.
Challenges and Solutions
During the course of the design process, we have encountered several demanding challenges, some of which have been easier to face than others. At the start of the academic year, we were faced with the challenge of finding a recipient to help. Most people are not aware of the help we can provide and are wary at first, resulting in a dip in team motivation. Nevertheless, with persistence and a keenness to promote our cause, we sourced Monty’s case and acted on the heart-warming opportunity in a heartbeat!
COVID-19 has made everyone’s lives harder. Working remotely has not been easy, meetings took longer to be scheduled, as we had to take into account differences in time zones and made progress harder during the meetings. The current situation has also made it impossible for us to be able to meet with Monty in person, in turn demanding the creation of a detailed dimension list for Monty’s owners and vet. As we are unable to do this ourselves this year, we are waiting for Monty’s vet to take the measurements herself and get back to us about this.
Even though Fusion 360 was a challenge to self-teach throughout the pandemic, the decision to use this software as our main project CAD platform was nothing short of phenomenal in the production and alteration of our cart components.
As you would expect, there is a language barrier between us and our recipient. This has made things difficult as we have to guess ourselves, with help from the owners, what needs Monty might have and whether it feels comfortable. Many factors had to be taken into account to ensure the device would not restrict the dog physically, allowing him the freedom to run outside and go on long walks with his owners once more.
Motivation
Learning and helping were our main motivations. As biomedical engineering students, we are set on developing our skills to improve the quality of life of those in need. Handprints e-NABLE Scotland inspired us to put our efforts into making devices as inexpensive as possible, making it more affordable, as well as improving the structure and durability of previous models. After learning last year’s team’s project was put on hold and never came to an end, we were determined to ensure our project would be seen through all the way, even if that means continuing our work over the summer.
This project, besides helping out Monty, serves other purposes, such as including the promotion of the Handprints cause to the wider public and engineering community. This way we help promote our other teams, such as the Education Division who teach younger kids about the inspiring design efforts and work ethic that Handprints maintains at its core. We are exceptionally grateful to RS Grass Roots for providing us with the amazing opportunity to promote our inspiring animal-focused cause to the wider student and engineering communities.
3D printing is a cost-effective method of production. At Handprints e-NABLE Scotland we take advantage of this and all the skills our members bring to ensure the best possible help is given to our recipients. To learn more about the work we do at Handprints e-NABLE Scotland you can have a look at our social media platforms:
- Instagram: https://www.instagram.com/handprints.enable/
- Facebook: https://www.facebook.com/handprints.enable
- LinkedIn: https://www.linkedin.com/company/handprints-e-nable-scotland/
- Website: https://www.handprintsenable.com/prosthetics
If you have any comments about our project or know of anyone who could benefit from our help do not hesitate to reach out to us:
- Outreach team: outreach.handprints@gmail.com
- Megan: 2557744k@student.gla.ac.uk
- Rachel: 2449877d@student.gla.ac.uk
- Lucia: 2401478m@student.gla.ac.uk / https://www.linkedin.com/in/l-munoz-bohollo/
Comments