Remap UK - Building a bespoke dog ball launcher: Part 1
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Remap is a UK charity which provides bespoke engineered solutions to help people with disabilities to achieve greater independence and quality of life ( Remap.org.uk ). The charity has around 70 local groups across the UK, comprising over 850 volunteer engineers with a variety of skills and disciplines, to design, engineer and produce these bespoke solutions. We help around 4000 people every year, who in many cases are unable to find a suitable solution from NHS or from normal commercial sources. This is generally because the need is developed from a number of different problems, not just the direct issues derived from their disability. All equipment is provided to the beneficiary free of charge, so the charity is reliant on grants and donations to fund materials and equipment.
Solutions range from relatively straightforward carpentry or metalwork to more challenging equipment requirements encompassing electrical, mechanical and control, and 3D printing. For many cases, we are approached by local occupational therapy staff to help people where NHS solutions are not available.
I am Chairman of the Brighton and Sussex local panel (brighton.remap.org.uk ) which has around 20 volunteers all giving their free time to be involved with engineering, admin, organisation and finances or other activities. Approximately 6 or 7 volunteers are very active in the engineering and completion of cases, others are less active, any involvement is welcome, we have around 20 cases live at any one time. We are also fortunate to have 2 volunteers with professional experience in Occupational Therapy so they review each case when first received and discuss it with the prospective client in more detail before making recommendations to our engineering team
Examples of recent cases
The range of cases varies significantly and can involve all aspects of engineering and practical skills. Some volunteers make equipment in their home workshops and others design the solution for making by others. Examples include -
- Helping a client, born with no arms and short legs, to modify a lightweight travel wheelchair for use during regular travel across Europe, it was not quite fit for purpose to suit the client's bespoke needs, it was very uncomfortable and needed modifying to improve access, egress and control.



- Helping a client with MSA (Multiple System Atrophy) who has poor head control & general posture meaning that he can’t hold his head to project his voice, i.e., his chin is almost pinned to his chest. His voice isn’t very strong so it’s very difficult for his wife and daughter to hear him. A lapel-style microphone, amplifier and wired headset was the solution needed, the client provided a donation for the commercially available items and we did the rest!

- Helping a client with Motor Neurone Disease to suction excess saliva from the front of his mouth every 2-3 minutes.

- Helping a client who is unable to stand for more than 20 seconds, transport food and beverages to his TV room

- Providing a 3D printed holder to operate a spray dispenser

- Enabling a client with chronic pain and full-time care to continue with playing the harp

A new case - background - dog ball launcher
Our client Olli suffers from muscular dystrophy and spends all his time in his powered wheelchair. He wants to be able to throw a tennis ball for his dog in the garden, but with his health declining significantly over the last year, he is unable to throw or collect a ball. There are devices on the market that will throw balls for dogs, but they all require the ball to be replaced into the machine’s hopper before the ball can be thrown again. Olli bought one of these devices but is now too weak to pick the ball up and drop it in the hopper himself, and so far, he has been unable to train the dog to do it for himself! Olli wants to actively interact with his dog.
Our expert volunteer engineer Noel has been working closely with the client who had researched commercially available items and bought some of them for trial purposes. He describes the progress below.
Challenges
Many readily available devices throw out lightweight plastic balls (mainly for use by young children, but in this case the plastic ball would soon be destroyed by use with the dog.
The new system using a tennis ball will need motors to launch the tennis ball into the air, from its robot base, motors to drive the robot around, motors to raise and lower the launch tube, electronics to power and control these motors, and an Arduino to decode the radio signals and coordinate the actions required.
Solution phase 1
Firstly we needed to develop the “specification” for the bespoke equipment so our engineer Noel identified some questions which Ollie was able to answer. These included:
- Distance range the ball needs to be thrown? - Our garden isn't very big so it doesn't need to throw miles, Maybe 5-10 meters.
- Angle range the ball can be thrown? Not sure what's best for this, 45 degrees?
- Terrain capability. E.g. Solid wheels, pneumatic wheels, Mecanum wheels? Basic solid wheels with rubber tyres would be fine.
- The power supply requirements. Mains or battery, voltage, run time? I have lots of 2s LiPo batteries already so if we can get it working with them that would be great.
- Weight and size of robot. Doesn't need to be very big or heavy, as long as it’s fairly stable.
- Radio controller type and number of channels required for all operations. Game style controller would be best so it’s easy for me to hold something like a radiomaster T8 lite, would need forward/reverse, left/right steering, then if you use the same design as the one I found on Amazon that has a "grabber/pincher" then a way to raise the barrel up/down then also a shoot.
- Projection method. Springs, catapult, slingshot, spinning gears, other? I'm guessing springs would be easiest, I'm not too sure on this one.
- Speed of operation. How quickly to prime and launch ball. Time to recover ball and reload? Speed of robot across ground? Doesn't need to be fast, precision is more important.
- Build material. Aluminium, steel, plastic, wood, combination? Whatever is the cheapest, easiest for you to work with.
- Completion timescale? How long are you willing to wait for a “workable” solution? Ideally I would love to have something ready for this summer so i can use it in the garden.
I developed a spreadsheet where you could enter the motor speed, the gear size, and the tube angle, and it would display a graph showing the ball trajectory. By tweaking these three parameters you could establish a combination of settings that would provide you with an order of magnitude for the launcher.
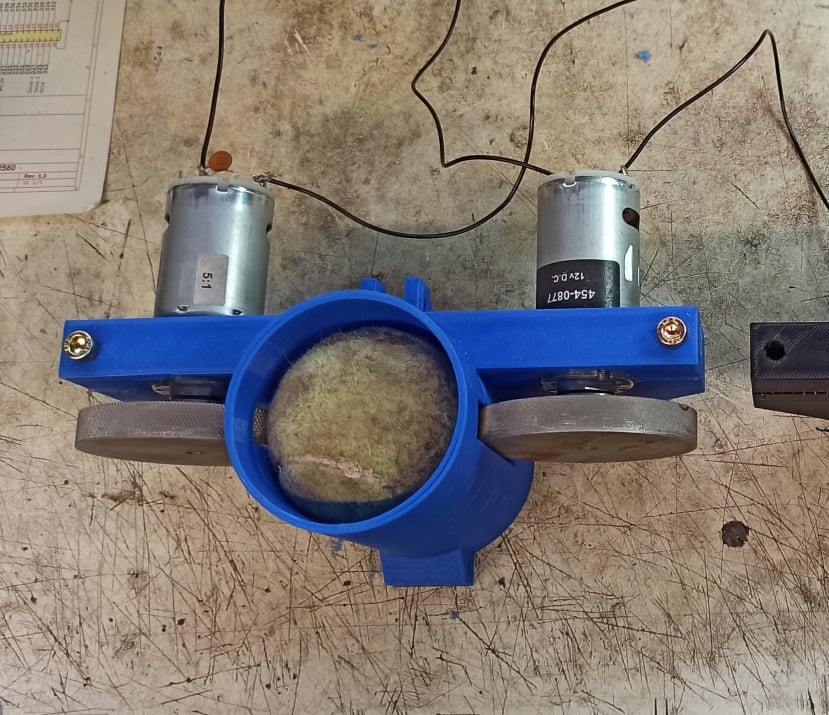
I then needed to decide how to grip the tennis ball, and how tightly to be able to launch it a reasonable distance, I chose a system using knurled wheel arrangement, one of the prototypes is shown in the photo. I tested the amount of squeeze and checked the power required to eject the tennis ball. Using trails with my own dog in the back garden I confirmed the amount of “squeeze” on the tennis ball of 15mm was sufficient to launch.
Trying an early prototype with our own dog in the back garden.
Further blogs involving the further phases of mechanical, electrical and control items will be outlined in subsequent news articles, as well as the development work required for this solution to overcome the additional challenges faced.
Comments