LoRaWAN Enable a Sensor
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
为现有传感器平台添加低功率、远距离无线通信功能。
随着 LoRaWAN 和物联网的发展,连接设备变得前所未有的轻松,如今通过网关 - LoRaWAN 基站 - 到互联网连接应用程序,从位于远距离的传感器获取数据变得令人难以置信的简单。
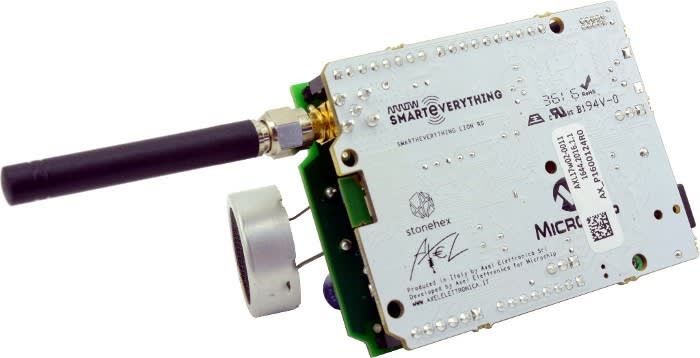
在本示例中,我们将带 LoRaWAN、GPS 等功能的 SmartEverything LION (124-8830) Arduino 兼容板与 Ardubat 屏蔽罩相结合,通过超声波检测蝙蝠。不过,通过简单的调整,此配置应该能够使用其他屏蔽罩和连接的传感器。
LoRaWAN
LoRaWAN 最惊艳的特性之一在于,任何人都可以用它构建网络,这些网关相对廉价,配置起来也十分简单。LoRaWAN 后台有各种选项,这可以视为“网络核心”,处理应用程序收发的路由数据和设备启用等。这些选项包括物联网(全球)、物互联(仅英国)和单机/自托管软件解决方案。
大量的物联网 (TTN) 互联网关覆盖着我们所在的区域,这意味着,我们无需拥有基础设施,可以仅实施节点,使用这种公开网络。如果情况并非如此,在 TTN 上建立新网关也相当简单,还能够与社区共享网络,从而扩大覆盖面。
如果您在访问某个网关,想查看附近是否还有,您可以查看地图。如果网关位于视线内,或者可能仅有少数建筑阻碍,那么连上它的可能性会非常高。
这些网络所使用的无线技术 (LoRa) 堪称现代化奇迹。和许多无线遥控钥匙和门铃一样,它们使用的射频频谱是 868MHz(在欧盟和世界其他地区,使用其他频率)。遥控钥匙的无线覆盖范围为 30m,而 LoRa 可以轻松覆盖 3,000m,甚至够到 15,000m - 是的,没说错,15km 的范围是有可能的。
通过利用一些巧妙的物理技巧可以覆盖如此广泛的区域,这些物理技巧一度为人们所知晓,但是直到最近才在商业电子设备中实施。LoRa 波形并非使用和大多数射频通信一样的单频,而是通过将 FM 线性调频调制到固定信号上进行“扩展”。这种技巧被称为线性调频扩频。通过对信号进行正向线性调频,从背景噪声中甚或在带内/带外干扰中拾取信号会变得更加轻松。
此外,数据编码方式也旨在尽可能扩大覆盖范围,凭借这两个因素,令人惊叹的距离变为现实。
WAN 部分怎么样??
LoRaWAN 的广域网 (WAN) 部分是整个拼图的智能 IoT 侧。节点部分与 LoRa 协议一起,由 SmartEverything LION 上的微芯片 RN2483 模块进行处理。网关负责转发 TTN 收发到的数据包,除了将节点连接到此网络中,我们几乎无需做任何事情;它将负责其余的事情 - 重复网络删除、网关管理、数据转发、加密和安全,等等。
蝙蝠检测
大多数蝙蝠检测器的工作原理是,侦听蝙蝠用于回声定位的超声波啁啾声。从这些啁啾声的波长和频率,我们可以确定检测到了哪个品种的蝙蝠。尽管市场上有商用蝙蝠检测器,但是我们没有找到支持 LoRaWAN 的同类产品,因此,我们也许可以开创先河!
与商用蝙蝠检测器相比,Ardubat 检测器有一些局限性。例如,它对高频范围有点迟钝,这表示我们可能无法检测马铁菊头蝠/小菊头蝠 (80-100Khz)。此外,我们不录制声音 - 只是记录脉冲频率和持续时间 - 因此区分一些品种可能会比较困难。
鉴于蝙蝠检测器的特性,我们必须考虑以下因素:
- 它需要用电池供电,长时间运行
- 固定设备将位于远离 WiFi 和电力设备的旷野或仓房
我们的设备
Arrow SmartEverything LION 开发平台为兼容 Arduino 的 LoRaWAN 设备/完整 IoT 开发套件,位于一个简洁的封装中。
使用此设备的第一件事情(和使用任意 LoRaWAN 设备一样)就是从它那里获得 HWEUI。这是一个用于网络访问的唯一标识符。之前大多数人遇到过的、最接近的类似概念是 MAC 地址。
因设备的不同,获取此标识符的方法也各不相同,对于 LION,有几个选项,但是最简单的方法是加载代码示例“getChipInformation”,这会将此标识符输出到串口上。另一个选项就是在主应用程序中添加以下代码,这允许直接访问 RN2483 模块,我们可以通过命令“sys get hweui”对此进行查询。
if (Serial.available())
{
c = Serial.read();
Serial.write(c);
buff[i++] = c;
if (c == '\n')
{
Serial.print(lora.sendRawCmdAndAnswer(buff));
i = 0;
memset(buff, 0, sizeof(buff));
}
}物联网设置
在物联网上设置账户非常简单,按照熟悉的帐户设置操作,几分钟内就可以完成注册,获得网络访问权限。接下来我们要进入 TTN 控制台设置我们的节点。
转至“应用程序”选项卡,我们可以先添加新应用程序:
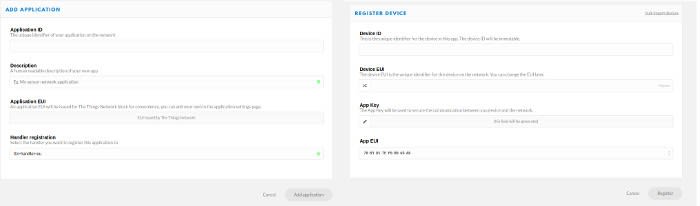
此后,我们需要注册设备,设备概述类似下面的样子:
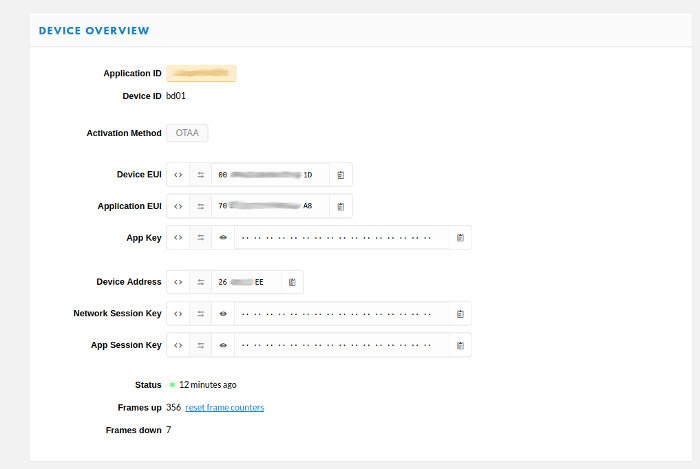
完成这部分后,就配置好了 LoRaWAN 设备,一旦实施了 Arduino 代码,此设备就可以连接至物联网。
由于我们已体验过 SmartEverything LION,因此我们跳过了该步骤,但是在此处,从示例“sendDataOTA_console”入手,测试您的设置和网络连接,这是一个不错的开始。在此示例中唯一需要更改的代码如下所示,这些信息可以在 TTN 应用程序的设备概述选项卡中找到。
err = lora.macSetAppEUICmd("0000000000000001");lora.macSetAppKeyCmd("ffffffffffffffffffffffffffff0000");网络局限性
使用 LoRaWAN 时应注意的一个关键点是,数据带宽较低,非常低!
允许的限值为每个信道约 1%,但是各不相同。这可能是模块-在我们的情形中为 RN2483-强制执行的硬限制。这也是网关必须遵照的限值(在这以后会更多)。
此外,TTN 具有公平的节点访问策略,广播时间限制为每 24 小时上行链路 30 秒,每天 10 条下行链路信息。由于网关必须遵照这些传输限值,因此不保证会从网关得到回应,尤其是如果有人违反了网关上的公平使用策略,则更是如此。
LoRaWAN 有两种供应方法:空中启动 (OTAA) 和个性化启动 (ABP)。简单来讲,ABP 使用一个设定的密钥,并且此密钥永不更改。这可能会变成一个安全问题,因为加密密钥永不更改,长期来讲安全性可能会越来越弱。
每次连接时,OTAA 都会分配新的加密密钥,因此这可以通过重新引导设备和强制重新连接来更新密钥。第二个方法操作起来有点烦琐,并且依赖于网关的响应。这表示如果网关处于忙碌状态或者已用完其传输配额,可能要花一些时间才能实现成功连接。
调整示例
先前已针对其他应用对此示例进行调整,我们发现了一些局限性:
- 主循环对定时的控制效果不佳,并且可能向无线模块发送垃圾信息
- 由于上述调节定时的原因,添加代码可能会成为一个问题
- 这会导致 RN2483 拒绝传输请求,从而出现连接问题
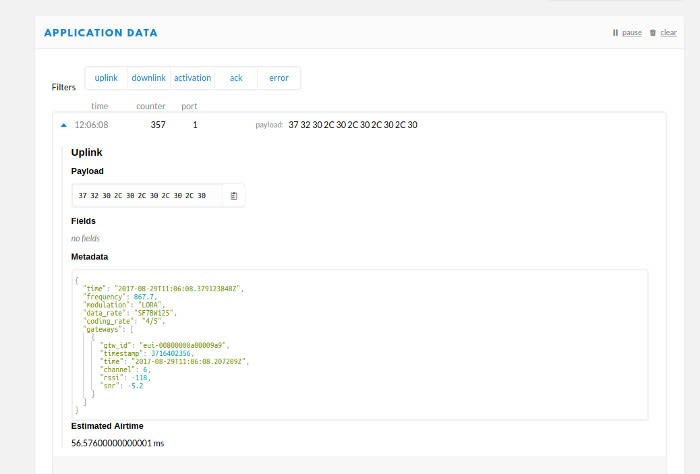
这个问题的解决方案是,实施更准确的定时循环,并且将传输事件限制为数十分钟一件。我们在最终应用中使用 60 分钟。按照 SF7BW125 的最低扩频因子(最小范围),2 字节有效负载每次通信将消耗大约 45 毫秒广播时间。每天提供 1 秒广播时间的总传输。如果增加至 SF12(最长范围),我们将有 27.6 秒钟,这使我们的节点有相当多可用的总广播时间,而且未打破公平使用策略。
考虑扩频因子的这种差异,并且不去想当然认为任何传输都使用 SF7,这在 LoRaWAN 中至关重要,因为很有可能使用的是 SF12。考虑到这一点,我们将示例中的大量代码移到称为“LoRa_TX”的函数中,用我们自己的字符串替换发送的数据,并且为确认的传输添加条件检查,因此我们可以决定周期性地使用它。
if (MAC_JOINED(state))
{
if (!joined)
{
Serial.println("\nOTA Network JOINED! ");
joined = true;
}
tx_cnt++;
if(Confirmtx==true)
{
Serial.println("Sending Confirmed String and clearing count...");
returned = lora.macTxCmd(String(s), 1, TX_ACK); // Confirmed tx check received ok so we can clear the count
if(Serialdebuglevel <=1)
{
Serial.println(returned);
}
if(returned == "RN_OK")
{
BatsDetected =0; // clear bat count
}
Confirmtx=false;
}
else
{
Serial.println("Sending UnConfirmed String ...");
lora.macTxCmd(String(s), 1); // Unconfirmed tx buffer if required
}
}
else
{
joined=false;// Network is not joined so try to join
Serial.println("\nNot Joined Tying to Join");
lora.macJoinCmd(OTAA); // wait a while after joining
delay(4000);
} 我们有一个看起来相当稀疏的主循环:
void loop()
{
static bool joined = false;
LoRa_management(); // in here we relay commands to the RN2483 and deal with RX.
bat_detection_loop(); // bat related items get done here
checktime(); // this keeps track of time (must be entered a few times per second to avoid loss of time)
Time_to_tx(); // check the set the flag Go_Tx when we are ready to tx.
if (Go_Tx)
{
Serial.println("\nTry to TX:\n");
LoRa_TX(String(BatsDetected)); // this sends the Bat string
Go_Tx=false;
}
}添加了可自由使用的必要的全局变量和设置。是的,这是一种不好的做法,但是出于便利性原因,这里这么做正合适。该应用程序会开启并连接至物联网。
改进
如今代码会保留累计的蝙蝠计数,并每 60 分钟传输此未确认值。然后每 12 小时按照确认的上行链路对此值进行重置(仅在成功的情况下,才会重置计数)。
可能的改进:
- 理想情况下,这应该由网络应用程序控制,并且可以发送下行链路,以执行此计数重置功能。
- 这种蝙蝠检测不太智能,并且根据接收脉冲的频率和持续时间应该“丢弃”。这只是编码和实验的问题。
- 记录应该存储到 SD 卡中
- 系统使用相当大的功率,并且可能会处理硬件定时和睡眠例程,所以它对于电池应用而言更加实用。
- 最后也是最重要的,我们的数据有点“臃肿”,因为我们使用了 ASCII 编码字符串。理想情况下,我们需要处理程序来压缩和删除冗余数据并且仅发送二进制代码。
结语
向任意传感器添加 LoRaWAN 功能是一件相对琐碎的事情。但是凡事都有改进的空间,轻松实现核心功能也不是不可能。
此技术允许实现极低功率射频通信,非常适合长期记录应用。它具有一些局限性,但是了解这些局限性,并且相应地实施我们的代码,就可以为几乎所有传感器创建一个可靠的低成本系统。
Karl Woodward
Comments