リアルな走行機能を搭載した火星探査ローバーキットを組み立てる
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
市販されているほとんどの「趣味用」モバイルロボットは、一般的に、2輪、4輪、または6輪で、サスペンションやステアリングシステムは付いていません。方向を変える方法としては、スキッドステアリングやタンクステアリングと言われている、車輪ごとの速度の違いにより行います。2つの車輪とキャスターを備えたタイプについては、正確に移動でき、移動位置も予測可能ですが、他のものに関しては、正確に移動することは難しく、移動位置の予測もできません。
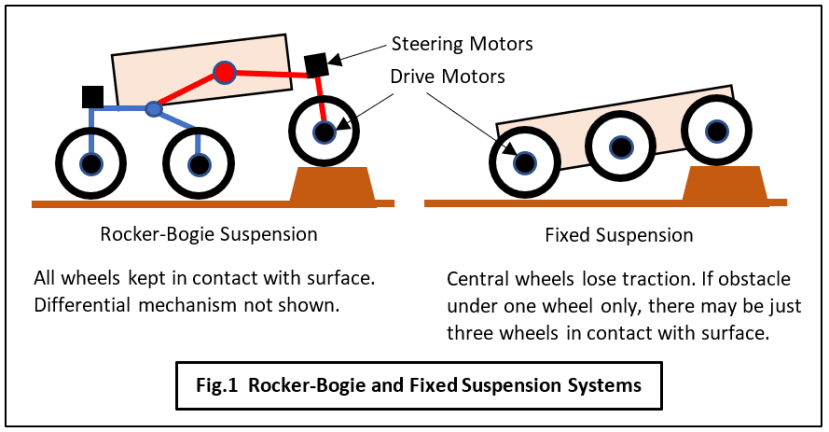
問題としては、火星探査ローバーのような「本物」のロボットは、険しい地形を正確に移動する必要があるということです。スキッドステアリングは不正確で、サスペンションがないと揺れがひどい程度では済まないトラブルが発生します。このため、火星のような、地表面は柔らかく、不安定な走行条件にもかかわらず、月面や火星において、キャタピラを備えた探査機は使用されません。この詳細については、私のロボット走行制御に関する記事を参照してください。すべての車輪が常に地面と接触している状態にするため、モバイルロボットにはサスペンションが搭載されています。下のFig.1から、6輪駆動で、Rocker-Bogie サスペンションを備えたものが、固定車軸式のものよりも、荒れた地面を走行するのに適しているかが分かります。また、方向を変えることができる4つの「コーナー」の車輪により、正確な方向制御も行うことができます。
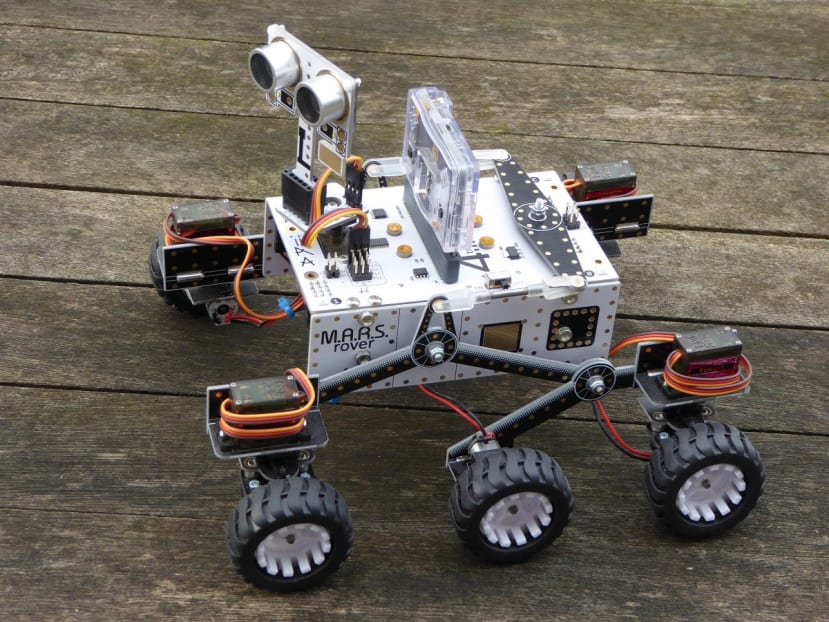
4tronix製 「M.A.R.S.ローバー」
なぜ、市販されているほとんどの「趣味用」ロボットにはサスペンションが付いておらず、スキッドステアリング方式が採用されているのでしょうか。特に目的なく庭の上を高速で動き回れるようにするために、単純な構造かつ頑丈につくることが理由のひとつとして挙げられます。皆さんは、本物のローバーの動きがどれだけ遅いかご存知でしょうか。
ところで皆さんは4tronix製のキット品「M.A.R.S.ローバー」をご存じでしょうか?このM.A.R.S.ローバーは、実際に運用されている火星探査ローバー(超小型のSojournerから、来年の打ち上げが予定されている最新のマーズ2020)とかなり類似しています。rocker-bogieサスペンションが効果を発揮し、6輪すべてが駆動、さらに、そのうち4輪はステアリングサーボモータも装備しています。キットの他に必要なものは、「頭脳」となるBBC micro:bitコンピュータボードのみです。Raspberry Pi Zeroバージョンも開発中ということです。このキットは「フラットパック」形式で提供され、表面に美しい金の回路パターンやプリントが施されている基板でつくられた、本体パネルとサスペンションパーツで構成されています。ねじ込みブッシングまたはナイロックナットと機械ねじで、部品同士が1つに結合されています。扱いにくいセルフタッピングネジは使用していません。唯一の懸念としては、ねじ付きボルトで留められている、旋回するアームです。細いスチール製のスリーブを入れる穴に、毎回腹を立てることになるかもしれません。PMDCトラクションモータとステアリングサーボのどちらも金属ギアで構成されているというところは良い点です。スキャン用サーボモータには、超音波距離計も搭載されています。さらに良い点として、ServoZeroツールが含まれています。このServoZeroツールという小型ボードは、ステアリングアームを組み立てる前に、ステアリングサーボを90°にセットする用途で使用します。
4tronixのWebサイトに詳しい手順書が掲載されていますが、部分的な組み立てを先に行ってから、本体に取り付けることをお勧めします。こちらの方がずっと簡単で、破損のリスクも減ります。
micro:bitは、ブロック言語MakeCodeを使ってプログラムします。このMakeCodeはMicrosoft社によって提供されている無料アプリで、4tronixのWebサイトにて、ローバー用の拡張機能が提供されています。
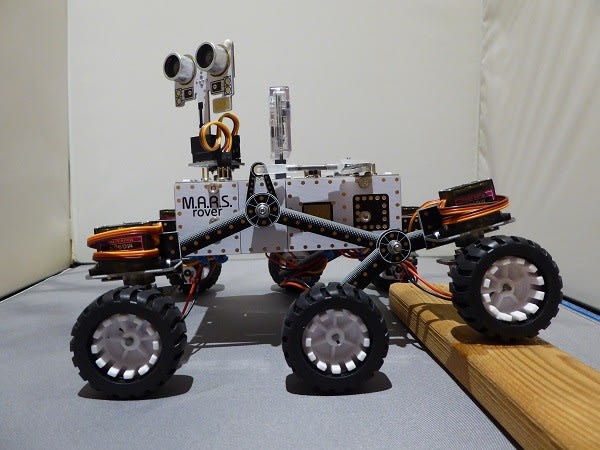
下の画像は、rocker-bogieシステムの仕組みを示すものです。この静止画像では片側しか見えませんが、路面の大きな隆起を通る際、サスペンションシステムによって、6つすべての車輪が接地した状態を維持していることを確認できます。
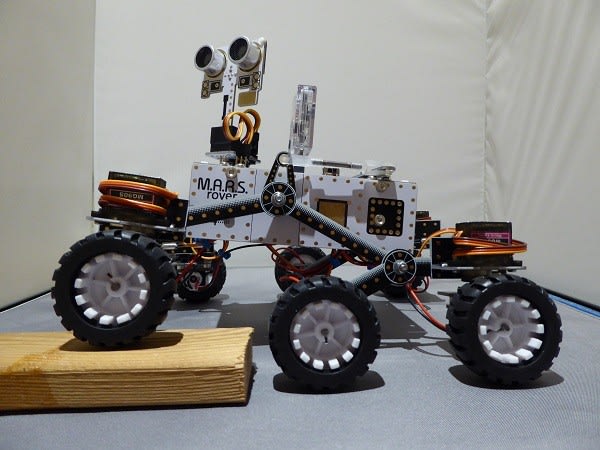
前輪が持ち上がると、rockerアームがその支点を軸に回転し、differentialロッドが押し下げられ、その結果、ロボット本体上面のdifferentialアームが回転します。この動作により、反対側のrockerアームが回転し、もう一方の前輪を押し下げます。これによりロボット本体の横方向の傾きが軽減されます。それと同時に、両側のbogieが中央の支点を軸にわずかに回転し、4つの後輪が接地した状態が維持されます。
中央の車輪が岩に乗り上げたとき、rockerアームの位置は変わりません。代わりに、bogieが支点を軸に回転し、後輪が接地した状態で保たれます。ロボットの反対側に変化はありません。

ここで前輪が障害物から離れ、後輪がこの障害物に乗り上げます。すると両方のbogie車輪がrockerアームを押し上げ、ここで前輪が地面に戻ります。differentialアームが反対に回転して、もう一方のbogieを押し下げます。これにより、前輪が引き上げられ、横方向の傾きを相殺します。
最後に後輪のみが障害物上に残った状態になり、rockerアームがほとんど始めの位置に戻りますが、bogieが旋回して中央の車輪を地表面に戻します。
まとめ
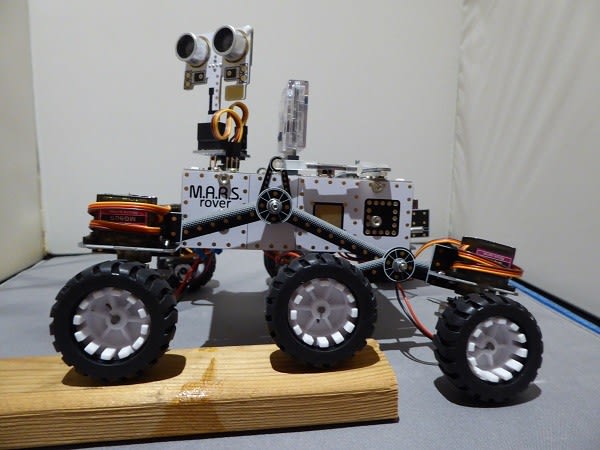
すべての段階で、6つすべての車輪が接地している状態が保たれます。庭の石を乗り越えるのではなく、大部分が平坦で、小さい障害物があちらこちらに散らばっている、火星の表面のような場所を走行させて、実際の動きを見ることで、この複雑な構造の効果を理解することができるでしょう。今回行った簡単なデモでは、画像にある木のブロックを平坦なテーブルに置きました。ローバーは片側だけブロックにぶつかり、止まることなくブロックを乗り越えて走ります。コースを外れることもありません。固定車軸式のバギーであれば、コースを大きく外れてしまうでしょうから、これは驚くべきことです。
来年打ち上げ予定のESAのローバー、Rosalind Franklinにも期待しています。こちらも6輪ですが、完全に異なるサスペンションシステムが採用されています。
もしどこかで行き詰ってしまったら、私のTwitterの投稿を見てください。電気や科学技術に関する最新のおもしろい記事や、ロボット、宇宙探査に関する記事を紹介しています。