Automotive design - sustainability and sensor ability
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Automotive design is going through some of the biggest changes it has seen, possibly since the invention of the internal combustion engine. The pressures for change are coming from several directions, ultimately much of this centres around global net-zero targets and reducing our reliance on fossil-fueled vehicles.

Emission and safety are two factors that are changing our daily commute
Fuel economy and emissions have been long-standing concerns, driving the development of increasingly efficient engines and control systems. The need to move towards a net-zero world is pushing automotive designers to focus increasingly on battery electric vehicles as the ultimate endpoint. Similarly, safety concerns have led to the introduction of systems that actively protect the driver, passengers and other road users from injury with autonomous vehicles seen as the best route to preventing accidents from happening.
All of these trends are facilitated by the strategic deployment of intelligent electronic systems. But it will take time to reach some of the targets. In the case of autonomous driving, projections by Edwin Olson, professor of electrical engineering and computer science at the University of Michigan and the CEO of May Mobility, indicate that full autonomy will not be reached before the next decade based on the number of errors requiring human intervention that automated systems make when presented with real-world road conditions. When the systems are perfected to the degree that errors that do not need human intervention occur no more frequently than every 100 million miles of driving across the entire fleet, the market will likely accept full autonomy.
Because it is such a long road to autonomy, the key to success for automotive designers is to work on gradually upgrading the performance of advanced driver assistance system (ADAS) designs until they are ready for fully autonomous operation and doing it in such a way that the manufacturers can provide features that are attractive to drivers with each upgrade. This strategy is driving the development of what have become known as Level 2+ capabilities.
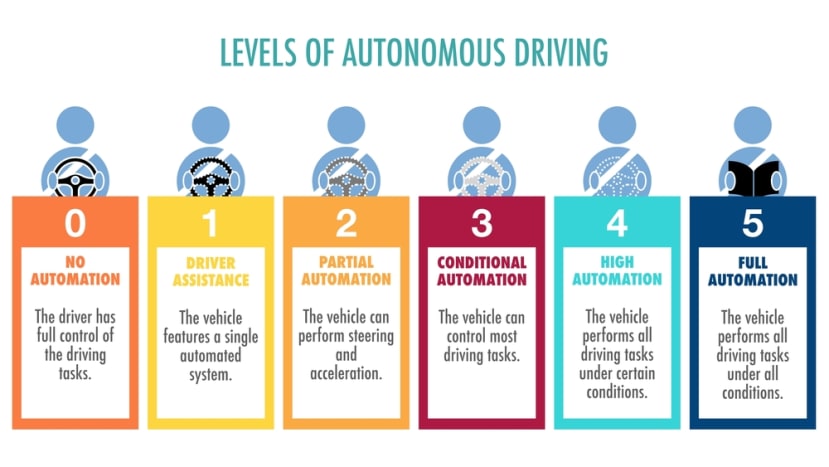
The Society of Automotive Engineers (SAE) has defined six levels of autonomy, from Level 0, where there is no practical automation other than alarms such as those generated with the help of ultrasonic proximity sensors added to aid parking, to full autonomy at Level 5. At Level 2, control over direction and braking is shared between the driver and the vehicle computers but the driver is considered to be in charge of decisions at all times. An example is adaptive cruise control combined with lane-keeping. The driver can take their hands off the wheel, but they remain responsible for situational awareness.
At Level 3, the car can take over some functions, such as driving along a motorway or valet parking in a garage where the car directs itself to a free space all the way from the entrance. These features are being incorporated into some luxury models, with work for mainstream products focusing on enhancements to the next level down. Level 2+ provides an intermediate point that automotive vendors are focusing on for the near future because it provides saleable features that can be implemented using today’s level of AI and computing technology. It supports the deployment of autonomy during clearly defined operations, such as overtaking a vehicle on a multilane highway or letting the vehicle take control when stuck in a traffic jam. In slow-moving queues, as space opens in front, the vehicle sees that it can crawl forward, relieving the driver from constantly having to switch between accelerator and brake. Automated overtaking helps improve safety and convenience by checking for a safe gap in the outer lane before pulling out, accelerating and pulling back into the inner lane. As well as reducing risk, such systems may contribute to lower congestion by encouraging drivers to stop hogging outer lanes unnecessarily, making the deployment of Level 2+ more attractive.
Making Level 2+ and Level 3 systems possible relies on a number of technologies, ranging from the application of multiple sensor modalities to improved processing throughput and safety features in compute SoCs. Because of the increased use of autonomy, dual redundancy in the processors used to analyse scenes and predict how the traffic will move is becoming a vital feature. In these architectures, the multicore processing complexes are duplicated and managed by logic that detects discrepancies and warns the driver of problems. High performance is a key requirement of these compute devices. To support the execution of deep-learning models, the processors are accompanied by arrays of accelerators that are optimised for handling the fixed-point matrix arithmetic that the algorithms need.
Because of the number of kilometres of driving conditions that need to be analysed, computer simulation is at the same time becoming a key part of the development toolbox. By playing out numerous scenarios on cloud-based servers, it is possible to exercise the ADAS more fully than would ever be possible in physical tests.
Though some manufacturers have chosen to focus primarily on visible-spectrum cameras arranged around the outside of the vehicle, many see the value in applying multiple sensor types, such as radar and LIDAR devices. In recent years, the angular resolution of radar has improved dramatically so that it can resolve smaller objects of interest, making it more attractive for Level 2+ functions. The addition of LIDAR increases cost but provides confirmation for the other sensor types as well as a level of redundancy if one or more other sensors fail at a critical moment, which helps improve the reliability of Level 3 features.
Level 3 autonomous driving using LIDAR and Radar
Linking these distributed systems is the increasingly important Ethernet network standard. Vehicle makers have a number of choices for in-car connectivity, beginning with standards such as CAN to support both safety functions such as advanced braking systems as well as in-cabin electronics. MOST was added in the early 2000s to support multimedia and infotainment. However, MOST has largely given way to Ethernet thanks to its high data rates and widespread semiconductor support. To support the demands of multiple cameras and sensors, manufacturers are turning to even higher data rate versions of Ethernet, pushing to 1Gbit/s and higher, to convey data reliably to the ADAS functions as well as dashboard and head-up displays that provide the driver with far greater situational awareness.
There continue to be developments on lower-data rate forms of Ethernet as manufacturers look to it to support functions that traditionally have been interconnected using CAN. The 10BASE-T1S standard provides for higher performance compared to CAN with similar functionality. For example, 10BASE-T1S, in contrast to the faster in-car forms of Ethernet, supports multidrop bus configurations, allowing one backbone cable to support multiple spurs to individual electronic control units (ECUs). This helps minimise space and weight requirements for cabling, which are important considerations for vehicle designers.
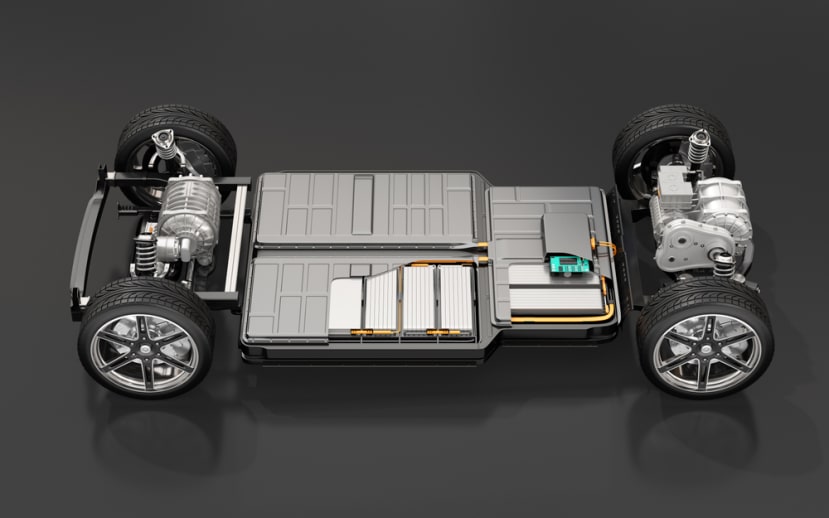
The growing reliance on batteries for providing traction is another driver of the need for efficient, low-weight interconnectivity. Electric vehicles (EVs) represent a small fraction of worldwide vehicle sales, but sales are forecast to rise rapidly over the coming years. Recent rises in oil prices will likely persuade more consumers to replace their existing cars as purchase prices drop and their maximum range increases.
Part of the solution to increased range lies in battery technology. However, developments in battery chemistry tend to be far slower than advances in semiconductor and compute technologies. So, much of the focus in R&D at automotive companies and suppliers is on improving the efficiency of energy conversion from the lithium-ion battery packs they employ. The key to efficient conversion is constant monitoring of the state of cells inside each battery pack. Each pack needs its own monitoring circuitry to gauge how much charge is left in each of the cells at each point. If the vehicle cannot monitor this charge status accurately, its estimate of range left has to be excessively conservative. According to some estimates, a 1mV error in measurement across the entire EV leads to a loss of one mile of driving range. As a result, highly accurate analogue-to-digital converters and other analogue circuitry are essential to improving the capability of EVs.
As batteries will be spread around the vehicle to balance their weight distribution, this leads to a high demand for connectivity. That need for connectivity is supported in part by multidrop networks such as 10BASE-T1S. However, some suppliers are looking to introduce wireless connectivity for battery monitoring to reduce the amount of local wiring.
The need for arrays of high-power semiconductor switches to convert energy from the batteries into traction is leading to major changes in the types of devices being deployed in vehicles. The wide-bandgap gallium nitride (GaN) and silicon carbide (SiC) technologies are proving instrumental in improving power density, not least because both are able to operate at higher temperatures than silicon equivalents. The relatively high electron mobility of these technologies coupled with high breakdown voltages both facilitate reductions in transistor size, which in turn helps increase switching frequency and efficiency. SiC is becoming a key technology for use in the voltage regulators used to charge high-capacity automotive batteries quickly. As well as being crucial to the RF systems that will be used in communications systems, GaN is also being investigated as a technology for building more efficient inverters that will be used to supply power to the vehicle’s main motors as well as in the DC/DC converters of air conditioning systems.
As we have seen, automotive design is undergoing massive changes through a long-term evolution that will need multiple incremental upgrades. As the coming year will show, even comparatively incremental progress will result in major changes to the electronics systems built into vehicles, as designers investigate a range of novel technologies, from process-level innovations in SiC and GaN up to advanced AI-based software tools.