
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。

Assembling the enclosure and turntable, connecting up the ebm-past motor and controller, and testing setting speed and direction using the Drive Studio software.
We had taken delivery of the custom cut aluminium panels for the enclosure for our antenna measurement system. As detailed in the previous blog post in the series, I had built a frame from 30x30 aluminium extrusion and laser-cut prototyped panels and a turntable from MDF, the designs for which we sent off to be cut from aluminium sheet. Now we were in possession of these they needed fitting to the frame, the motor bolting in place and testing.
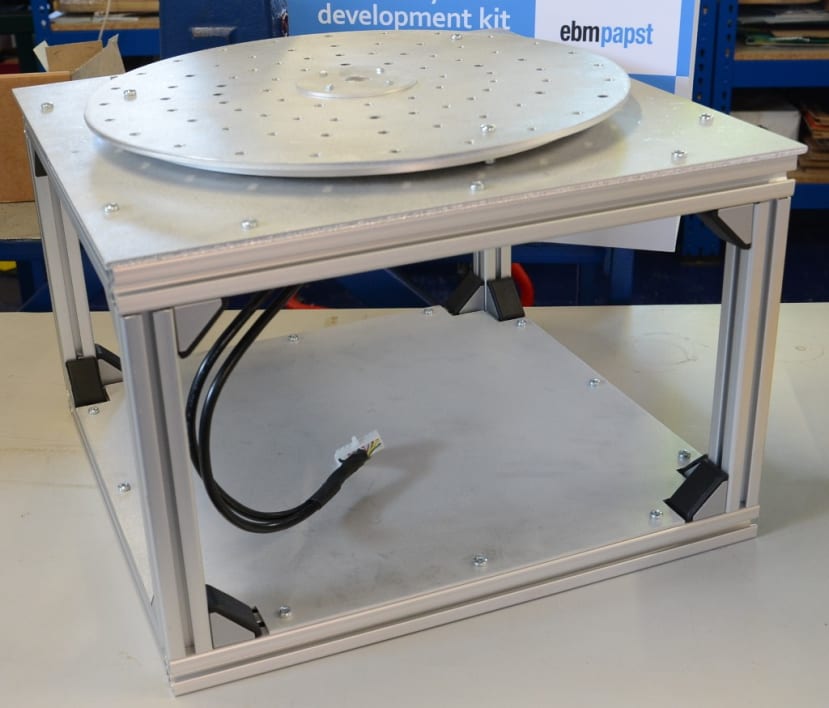
Once this was done it was time to connect up the motor and give it a spin!
Setting up
The K4 Drive System Development Kit (187-2146) comes with a motor controller, an RS485 adapter, RS485 USB cable, 3 power cables and the ebm-papst Drive Studio software on a CD. However, I downloaded the software from the ebm-papst web site to ensure that I had the most up-to-date version before installing it. I say “install” but actually all that was needed was to unzip the files and double click the DriveStudio.exe file.
The Quick Start Guide for the K4 drive system development kit is available for download here.
First I connected the RS485 USB adapter to the motor controller using the three-conductor cable and plugs supplied. The USB adapter plug and the controller socket are clearly labelled X, A, and B, so it is easy to see what goes where.


Next, I connected a 24V power supply to the controller using the cables supplied. The guide states that a minimum 10A rated supply should be used. Luckily I had a suitable power supply in an acrylic enclosure leftover from a previous project and so I used that since my regular bench power supply is only rated at 2A.

The power cables are coloured red, yellow and black. For a 24v supply the red goes to 24V positive, the black to the negative and the yellow connects the positive and the 24/48V socket – the supplied “banana” plugs make this easy.
There is an option for 48V that uses both 24V and a 48V supply, in which case the 24/48V socket connects to the positive of the 48V supply.
Once that was done and the motor was connected to the controller, I could see it was working by selecting inputs using the toggle switches on it. When they are all set to 0 the motor is off, but switching INA to 1 spins the motor clockwise with the dial controlling the speed. INB does the same but anti-clockwise.
Switch both INA and IN1 to 1 and the motor will spin clockwise at a default 1000 rpm. I was a bit wary at first as this sounded pretty fast, until I realised this value does not account for the gearbox ratio and this motor is heavily geared. Different combinations of the toggle switches will produces different rpm and/or spin the motor anti-clockwise.
Drive Studio
Having tried the motor out using the toggle switches on the controller, it was time to have a look at the Drive Studio software.
I connected the RS485 adapter to a spare USB socket on my PC and started up DriveStudio, then selected Demo from the welcome screen.
Clicking the Connect button in top left of the DriveStudio window initiates communication with the motor (I had a message that it could not find COM port 10, but when I clicked OK it connected fine on COM 20 and this has not re-occurred).
Next, select the Service Interface and enable the motor by switching either INA or INB on the controller to 1. Using Velocity mode, selected the desired RPM using the slider and then clicked and holding either the Left or Right button, the motor will spin at the selected RPM until the button is released.
In Position Mode, we can enter a number into the box and click the “Relative” button. A negative number will turn the motor anti-clockwise. 1 revolution of the motor shaft is set by 65535, remembering again that this is before the gearing, so I needed to input a very big number to get it to move much.
Selecting Digital Inputs instead of Service Interface runs the motor via its digital inputs – the toggle switches on the controller for example – whilst Drive Studio monitors and, if required, records what the motor is doing.
Parameters
Moving away from the Demo mode in Drive Studio, if you select the Parameters tab you are presented with a whole load of options to begin customising how the motor performs.
Clicking the Read Button will download the current settings from the motor and display them.
Once any parameters have been edited, clicking Write will update the motor’s settings, but any alterations will be lost when the motor is powered down. The Save button will write settings to the motor memory and these will then persist after the motor is restarted.
The most interesting and easiest parameters for me to understand initially were under the Velocity Mode tab. Here I tried changing the Fixed Speed Parameters and could see the effect after clicking Write and controlling the motor using the switches on the controller.

For the antenna measurement system, we are going to need to employ the position mode, so we can have the turntable rotate by a set amount, accelerating and decelerating slowly so as not to disturb the antenna attached to it.
I selected Driving set 3 from the drop-down menu under the Position tab and then edited the parameters, altering the distance to 1000000, remembering that one revolution of the shaft is 65535 counts excluding the gearbox ratio. I also increased the acceleration and deceleration rates and finally set the position controller to 1. Making sure the motor was de-activated – i.e. all the toggle switches were set to zero – I clicked the Write button. When I then switched the buttons INA, INB to 1 to initiate the motor and then switched IN1 to 1 the motor rotated clockwise for the set distance. Switching IN2 to one reversed the direction.
Next steps
Having worked out how to control the motor using the controller and Drive Studio software, our next task will be to control it with the Kunbus RevPi (192-8177) that we intend to use.
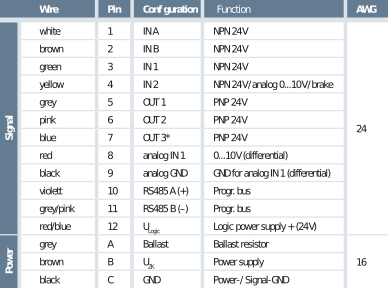
We have the details of the wires that connect to the motor taken from the K4 Drive System Brochure and so we can see the options available for controlling the motor.