 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
私たち "trifle" チームは、遠隔操作可能なカメラ付き小型探査システム「みまわりくん」を開発しました。本作品は、タブレット端末のモニター・コントローラーアプリを使用することで、遠隔地に存在する探査ロボットのリアルタイム中継映像を確認しながら RC カーのように自由自在に操縦できるシステムです。IP ネットワークにより通信するので、特別な無線通信のセットアップは不要です。
開発背景
本作品は、巡回警備や実地調査を自動化することを目的として開発されました。探査機に巡回させることで、ユーザーは敷地を歩き回ることなく快適な居室にいながら警備業務が実施できます。据え付けて設置された監視カメラよりも機動性が高いため、広範囲の場所で映像を捉えることが可能です。また、危険な区域での調査が必要な場合でも、本作品を利用することで人が立ち入る必要がなくなり、安全な探査が実現できます。
システム概略
本作品は Android タブレット端末に対応のアプリと、Raspberry Pi を搭載したカメラ付き小型探査機で構成されます。アプリは、探査機カメラの映像モニターおよび走行コントローラーの機能を持っています。それぞれのコンポーネントは下図のように通信しています。

探査機の Raspberry Pi 上では、カメラ映像のストリーム配信サーバと車両走行制御サーバが稼働しています。タブレットアプリが探査機にネットワーク接続をすることで、受信したカメラ映像のストリームをリアルタイムで視聴することができ、また探査機の走行をリモートコントロールすることが可能です。
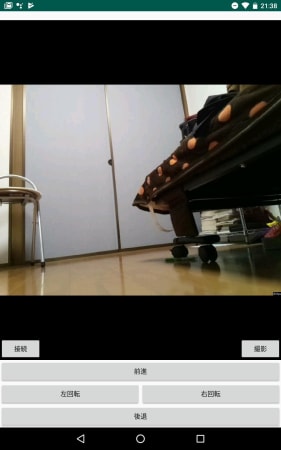
アプリのインタフェースは下図のようになります。探査機サーバのホスト等を設定して接続すると、探査機の映像モニターとコントローラーが表示されます。ユーザーはリアルタイム映像を確認しながら、RC カー感覚で探査機を操縦します。映像はいつでも画像として保存することができます。
 |
 |
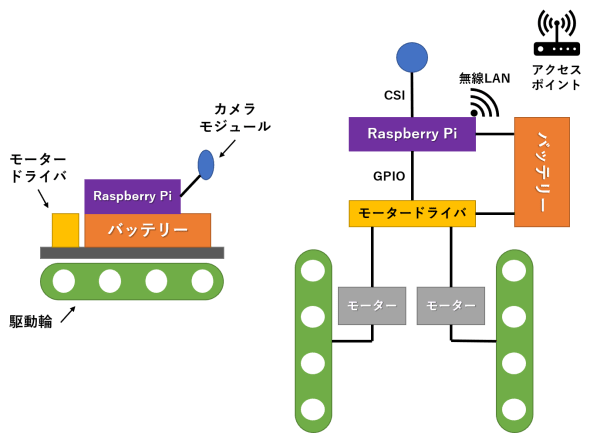
探査機のアーキテクチャの概要は下図のようになります。探査機は Raspberry Pi を中核とするデバイスで、バッテリー、カメラモジュール、モータードライバー、および左右のモーターと駆動輪が搭載されており、無線 LAN に接続します。電源ケーブルや LAN ケーブルは必要ありません。
実演動画
以下のリンクに、動作させた際の動画を掲載します。