【参考回路例】Renesas社のインダクティブポジションセンサ、IPS2550
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
IPS2550は、磁石を使わないインダクティブポジションセンサです。自動車や産業、医療、民生用アプリケーションの高速位置検出に使用可能です。渦電流の原理を利用して、1つの送信用コイルと2つの受信用コイルを組み合わせた部分上を移動する、金属の位置を検出します。
製品スペック
| VEL | 600,000 RPM Max. |
|---|---|
| 精度(3.3V) | +/- 0.2 %FS |
| 精度(5.0V) | +/- 0.1 %FS |
| 温度上下限 | -40C to 160C |
詳しくはIPS2550のデータシートをご覧ください。IPS2550のようなモーションセンサICは、RSのWebサイトから購入可能です。
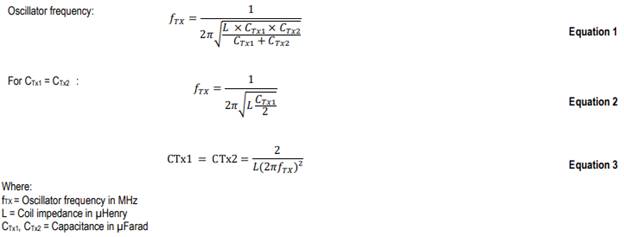
共振周波数は、送信側コイル L とコンデンサ CTx1、CTx2の値から、以下の式で決まります。
以下の角度追尾システムは、「随時変更可能な」設計になっています。青色で表示されているシステムのパラメータは、アプリケーションの要件に合わせて変更が可能です。実際にパラメータを変更後、新規のシミュレーションを実行(緑の再生ボタンをクリック)し、結果の違いをご覧ください。
この応用例では、IPS2550が0から2*Pi(6.28ラジアン)まで、0.2msで1回転するシャフトを追跡できることを示しています。これは300,000RPMに相当します。大半の設計パラメータはユーザーが変更可能で、回転角度を追跡するこのシステムに対してどういった影響を及ぼすのか確認することができます。これには、インダクティブポジションセンサ(IPS)の目標「形状(ここでは1回転当たりの電気サイクル)」や、発信周波数を設定するセンサのインダクタンスと外部静電容量値、入力電源電圧(Vdd)、アナログローパスフィルタの容量、量子化ビット数、角度検出アルゴリズムのサンプルレートなどが含まれています。
ぜひお試しを!
IPSのパラメータ「n」(シャフト1回転当たりの目標電気サイクル)を1から2に変更してシミュレーションを実行すると、有効な最大「電気」回転数である600,000RPMでのシステムのパフォーマンスが理解できます。また、ローパスフィルタのコンデンサを様々な値に変更することで、復調ノイズの低減だけでなく、回転角度の遅延や位相ずれの影響を確認することも可能です。
ぜひ、色々と動かして、他のシステム構成も自由に試してみてください。波形(スコープ)プローブを動かして、回路図上の配線部分や、コンポーネント内部の信号を確認することもできます。
コメント