 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
本周开始了项目的研发。我们小组负责的项目为格斗机器人“哪吒”的开发。此机器人的主要构想是,将一般普通机器人的下肢用两轮平衡车代替,此项改进是为了起到在机器人格斗比赛中增添观赏性,增加机器人自身灵活性,并方便比赛的输赢的判定。根据资料的阅读与和同伴的沟通,确定了彼此的任务,我们本周的目标是机器人手臂的拼装与接线最后完成调试。
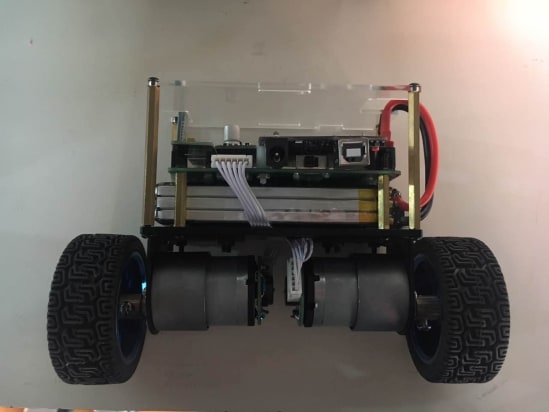
此为网上可以直接购买的平衡车成品。
主材料为八个lobort舵机与一系列的串口直U、串口斜U、侧板、底板、电线与各种螺丝等。因为材料的信号与接口不同,在连接时需要注意对称性与范围的可控性。比如在拼装过程中,我就遇到了舵机方向错误的问题,因为此型号舵机旋转角度最大为240度,分虚、实轴。所以在设计机器人的环节就需要事先想好动作范围与角度,以免舵机的烧伤与损坏。为了保证左右的对称,左右两只手臂使用的舵机在安装方向上会发生改变,比如一开始,我完全按左臂的拼装形式来组装右臂,发现因为两只手臂实轴方向一致,从而转动方向一直,这是错误的,机器人两只手臂的舒展应为不同方向,也就是向外展,改正后如下图所示。

改正后为:

因为设计上,一只手臂按照设想是有四个舵机组成,一共四个自由度,但在四个舵机的组成上,2号与3号舵机共同组成机器人的大臂,在连接上运用到了特殊的部件如下图:

通过两个侧板与一个长板间用两个塑料转轴的方式,固定住两个舵机,这样既稳定了舵机又提供了串线的空间。在这里,又遇到了一个新的问题,因为侧板型号只有一种,所以侧板与舵机的拼接方式只有一种,但是因为左右两只手臂的对称性,原理和上面提过的问题相同,所以需要改正一个舵机的方向。

单一型号侧板两侧不同的孔设计。
拼装过程中还遇到了如螺丝滑丝等问题,均通过多次的拆卸与拼装达到了预期的效果。初步完成后如下图。

左臂与右臂的对比。
在完成接线后,需要做的为将实物的3D图像通过对厂家提供数据的分析再用solidworks建立。如下图(图为串口斜U):

平面数据图。
3D成像图。
接下来需要做的工作就是将整个实体的构想利用软件做到3D成像。