 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
上周向大家详细介绍了关于哪吒机甲上肢的关键步骤,接下来我向大家介绍哪吒机甲另一关键部分——平衡车。关于平衡车自平衡系统的程序代码,不在此作介绍说明,我主要向大家介绍平衡车的组成原件与使用。
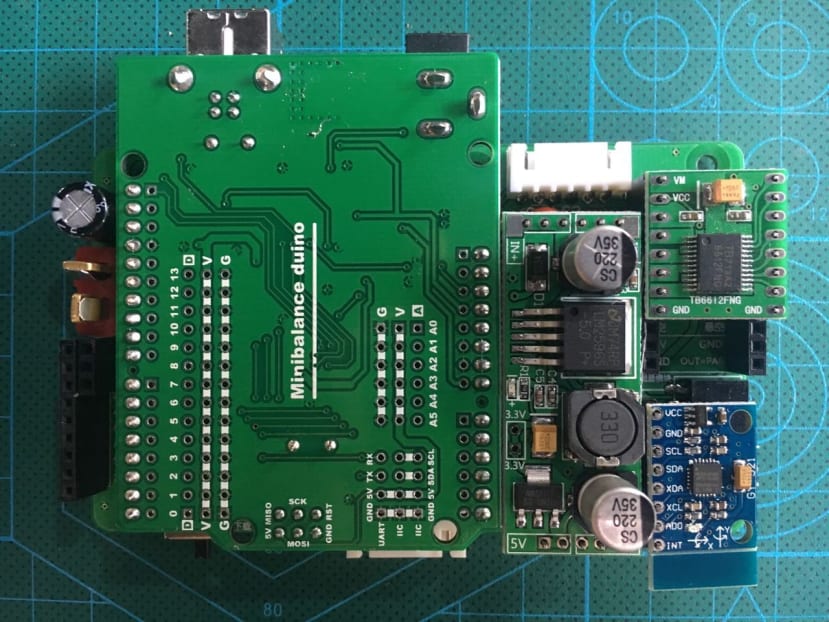
首先用平头螺丝,把转机支架与底板拼接起来。用螺丝将两个转机安装在支架上。然后将Arduino duino板、稳压模块12T05、TB6612、MPU6050分别都嵌在主控板上。嵌入时注意相对应的串口,不要接反,装好后可在接口处用热熔胶焊接。用两个三合一防松螺丝和六角铜柱,将Arduino板固定牢固。同样上述的方式,固定好MPU6050板。
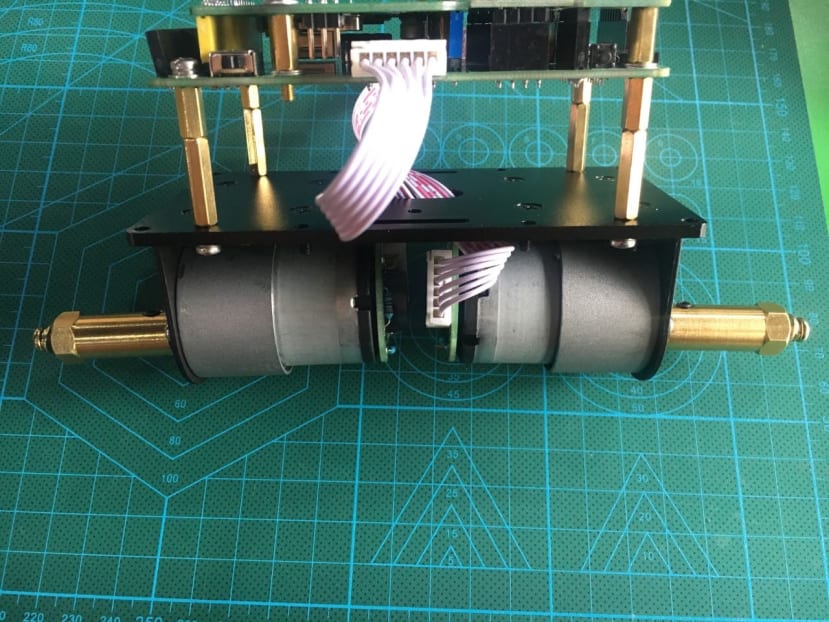
用两个不同型号的六角铜柱拼接为一个长度适宜的支架,用来支撑主控板,并为电池腾出放置的空间。注意不要忘记,我们刚才已经事先完成了四个支架中的其中一个,即MPU6050处的六角铜柱。用防松螺丝上下分别固定支架。将转机用专用线穿过底板连接到主控板上,用阻转螺丝将固定轮胎的金属元件固定在转机上。之后用防松螺丝固定好轮胎。利用防松螺丝在平衡车底板的四个角固定长的六角铜柱,以用来连接机器人的上肢。最后将中间有圆洞的木板固定在四个六角铜柱上
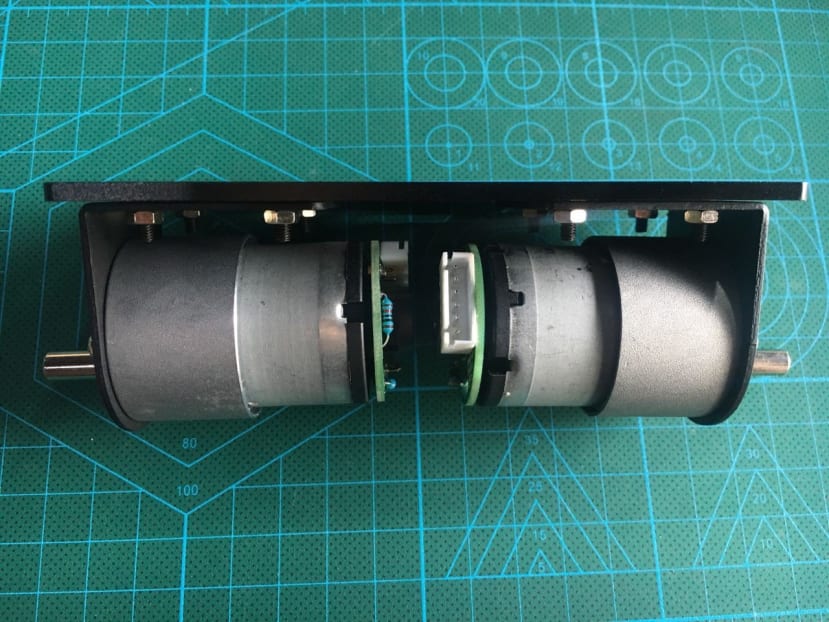
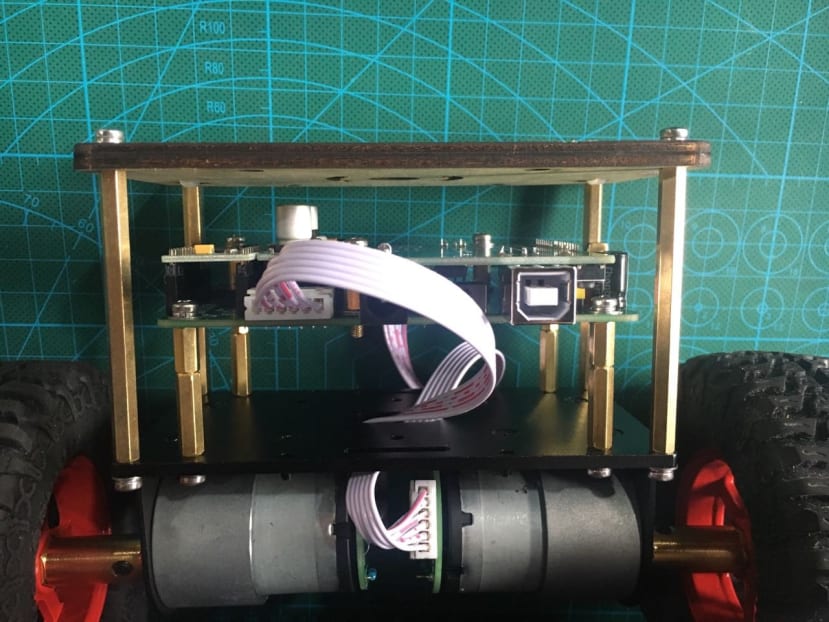
这样就完成了一部哪吒机甲的下肢,也就是平衡车部分,大家通过下图可以看到两组不同的平衡车转机,试验并对比后,我们选择圆形转机。
