 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
上周通过调整,已经将哪吒各组件拼接完成。并且整体轮廓已经初步呈形。此项目至此已步入中间阶段——改进。
通过上周的文章大家可以知道在哪吒中我们加入了一个复合的单片机板,但通过这周的测试与研究,发现这块板子是不必要的,因为完全可以通过外接蓝牙来与外界对接,并将平衡车与lobort板,也就是控制机器人动作组的主控板相串联,然后再通过简单的usb数据线便能做到烧写,所以不再需要这块既占地方又效耗电量的一块电路板。
因为平衡车主控板上电源的接口位置,以及电池延伸出的接线较短,导致插电时不方便,并且有损坏电池的风险,再因为平衡车与机器人主控板串联,所以每次都需要反复插拔电源线,这导致了电池寿命的损耗以及器材的损耗。于是用过讨论,我们决定,安装开关。
我们将开关安装在电池电源的输出端,剪断红线,将开关接入其中。此开关可控制后续将压板以及机器人总控板的电源输入。所以现在,只需要手动控制平衡车的开关以及新接入的开关即可。方便简洁并不易出错。
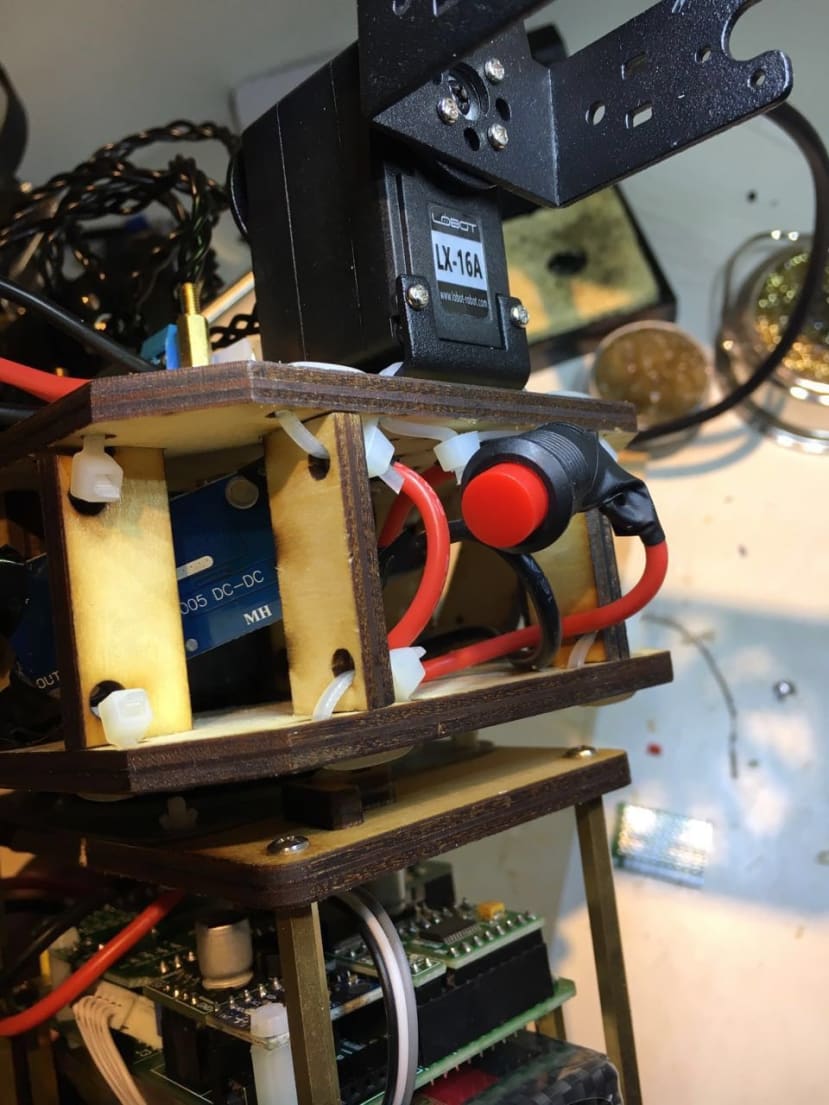
另外,为防止电源端线路因隔板空间狭窄而受阻或损坏的情况,我们人工实用工具在中间木板阻挡电源线路的地方,锯出一个类似梯形的空间,来缓和线路的连接时的不便。

在此之后,因后续机器人越加的完善,可以明显的感觉机器人的重心上移,并且重量在不断增加,这就加重了平衡车的负担。一个是平衡车PID参数的问题,需要进一步的调整来达到是机器人更加的平稳。二是机器人轮胎的问题,我们现在改换为更大的轮胎来支撑我们的机器人,这样可以大大降低PID参数调整的困难,并且可以较好地支撑较重的机器人。
