Pulse Train Hat for Raspberry Pi
Follow article
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
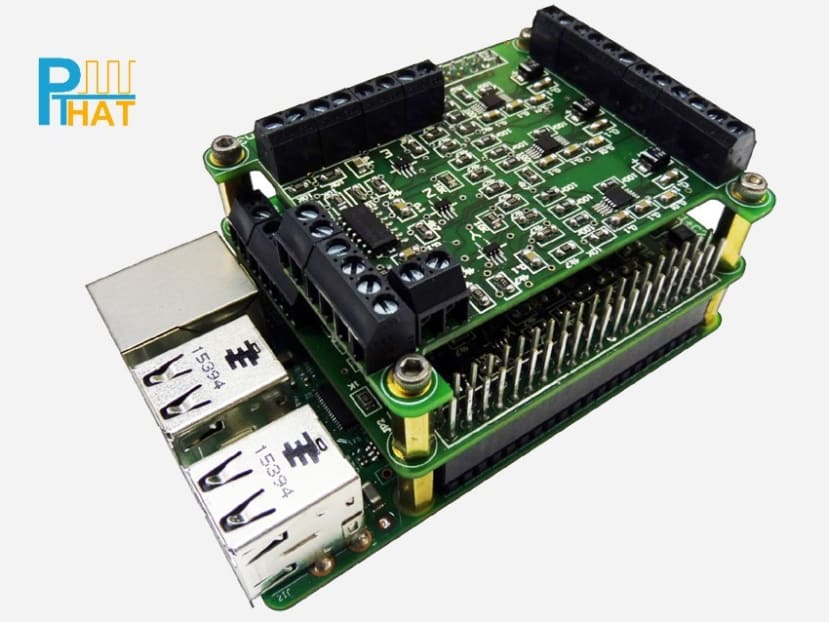
The Pulse Train Hat for Raspberry Pi is a unique solution for anyone wanting to control motors within their own projects using the Raspberry Pi computer.

The Pulse Train Hat is an add-on board for the Raspberry Pi computer and allows clean, fast and accurate pulses to be created using simple ASCII commands.
There are many hardware designs where a variable frequency pulse is needed, but one that is the most popular is for driving stepper/servo motors that use pulse and direction lines.
Motors like this are found in machines such as 3D Printers, CNC machines, Robot Arms and not to mention the other endless motion control and automation machines.
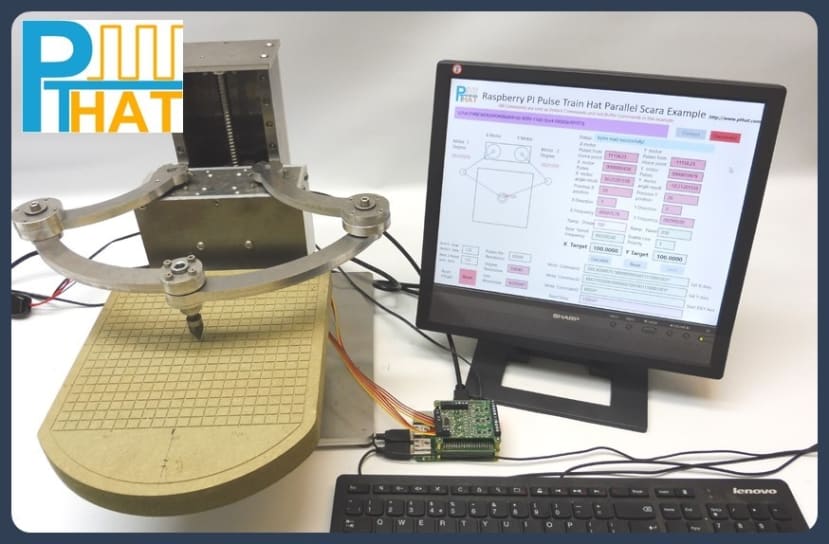
Below is a Test Rig we used while developing the code.
It allows us to test all 4 channels of the PTHAT by sending the pulses to stepper drivers, that were connected to small Nema 17 motors. It also has all the limit switch inputs brought out to switches, the ADC inputs connect to 10K pots and AUX outputs connected to LEDs.
We decided to use low-cost stepper drivers that are usually found in 3D printers as they are not brilliant, but do the job. Our thinking is if the PTHAT can control these noisy little drivers, then handling the more expensive drivers would be easier!

Controlling motors may seem simple, but when you get down to detailed control, it can all become very confusing and a big learning curve.
With the new Pulse Train Hat (PTHAT) add-on for the Raspberry Pi and a new dedicated support site, we plan to make that task very simple and allow everyone to easily create their automation product.
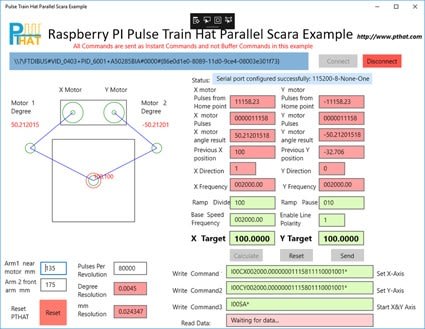
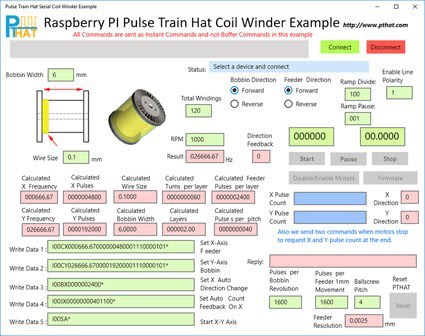
We have created a number of example applications using Visual Studio 2015 that can be used with Windows 10 IOT.
These examples have been written in C# as a Universal Windows Platform (UWP) and all the source code can be downloaded from the website.


We have also designed the PTHAT to have it's firmware upgraded easily using a JTAG programmer that we supply with each board.
Also, full details on the ARM processor we use has been released covering all the GPIO information, Clock settings and peripherals for people wanting to write their own firmware.

Also, there are a number of wiring diagrams released covering various stepper driver hookups.
Of course, you do not have to use the PTHAT to control motors and can be used as a pulse generator for other projects.
Please feel free to check out the dedicated support site for more information http://www.pthat.com


