Ihrem Roboter die Mobilitätssteuerung eines echten Mars Rover geben: Teil 4
Artikel folgen
 Dave von DesignSpark
Dave von DesignSpark
Wie finden Sie diesen Artikel? Helfen Sie uns, bessere Inhalte für Sie bereitzustellen.
Dave von DesignSpark
Vielen Dank! Ihr Feedback ist eingegangen.
Dave von DesignSpark
There was a problem submitting your feedback, please try again later.
Dave von DesignSpark
Was denken Sie über diesen Artikel?
Mars Rover 2020 Quelle: NASA/JPL
Roboter mit Rädern können verschiedene Formen annehmen: Es gibt sie mit 2, 3, 4, 6 oder 8 Rädern sowie mit oder ohne Aufhängung. Die Entscheidung, welcher Roboter am besten passt, ist größtenteils vom Untergrund abhängig: bewegt er sich auf dem schönen, gleichmäßigen Boden eines Lagers oder auf der rauen, unvorhersehbaren Oberfläche des Mars?
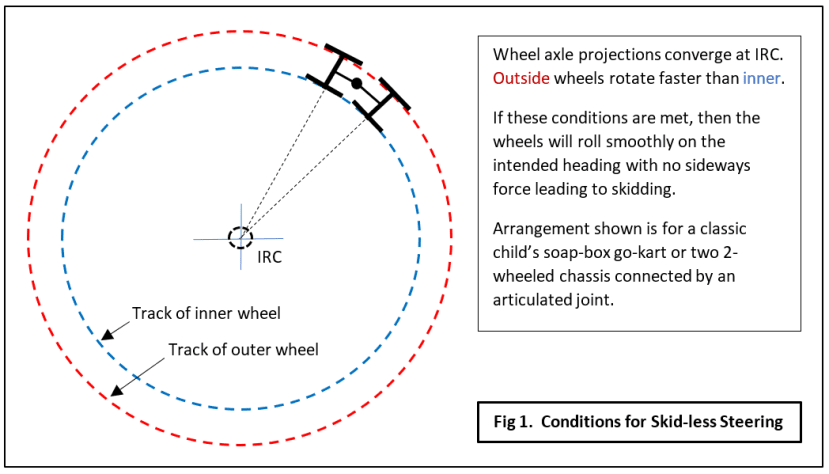
Lenkarten lassen sich in zwei Hauptkategorien unterteilen: explizite Lenkung oder Differenziallenkung. Diese werden jeweils in echte oder Panzerlenkung unterteilt. Welche Lenkung verwendet wird, hängt von der Aufgabe ab, die der Roboter durchführen soll. Beide Lenkarten eignen sich für jedes Gelände. Wenn die Bewegung jedoch präzise sein und genau gemessen werden muss, dann muss mit Ausnahme von 2-Rad-Maschinen eine Art des expliziten Lenkmechanismus zur Verfügung gestellt werden. Bei allen Robotern muss ein einziger Momentanpol (Instantaneous Rotation Centre, IRC) vorhanden sein. Jedes autonome oder semiautonome Forschungsfahrzeug, das eine genaue Positionierung benötigt, muss auf diese Weise entworfen werden. Das IRC-Konzept ist sehr leicht verständlich und kann grafisch dargestellt werden, ohne dass dafür komplexe Mathematik erforderlich ist. Abb. 1 zeigt, wie ein einfacher, beweglicher 4-Rad-Roboter ohne seitliche Schleuderkräfte gelenkt werden kann.
4-Rad-Roboter
In Abb. 2 sind drei weitere Varianten eines einfachen mobilen 4-Rad-Roboters zu sehen: Einer kann mit Präzision gelenkt werden, ein anderer ist weniger präzise, aber wesentlich wendiger.
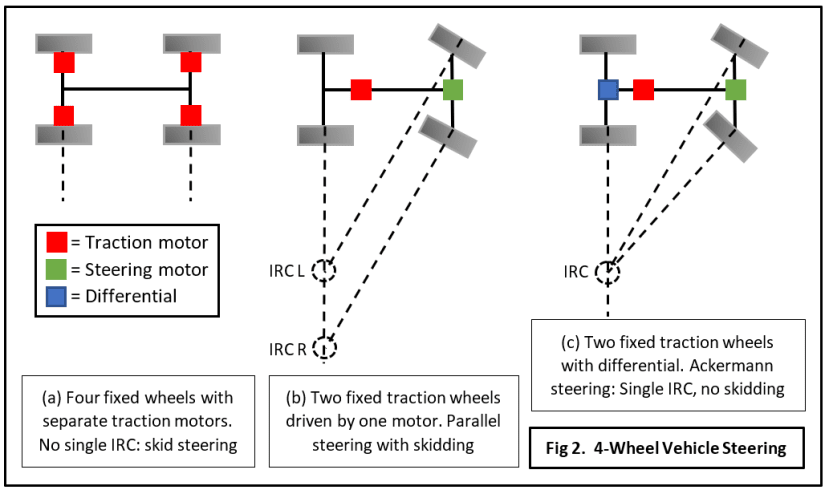
Konfiguration (a)
Feste Räder mit unabhängigen Motoren. In diesem Fall können wir die Differenziallenkung verwenden, bei der die Motoren auf einer Seite mit einer anderen Geschwindigkeit angetrieben werden als die Motoren im Inneren. Damit wird zwar eine Anforderung der echten Lenkung erfüllt, nicht aber die Notwendigkeit, dass sich jedes Vorderrad in die Richtung der Kurve dreht. Mit anderen Worten: Die Räder bewegen sich weiter geradeaus, während sie durch die Geschwindigkeitsdifferenz zur Seite gezwungen werden. Diese seitliche Kraft überwindet schließlich die Reibung, sodass das Fahrzeug in seine neue Richtung gelenkt wird. Diese Lenkung wird normalerweise bei Kettenfahrzeigen verwendet und wird auch „Panzerlenkung“ genannt.
Merkmale der Panzerlenkung
- Ermöglicht sehr schnelle Richtungswechsel, die aber zusätzliche Motorleistung erfordern.
- Das Fahrzeug hat auf jeder Seite Räder, die sich in entgegengesetzte Richtungen drehen können. Dadurch kann es sich auf der Stelle drehen.
- Allradantrieb für unebenes Gelände.
- Einfaches Design ohne komplexe mechanische Verbindungen.
- Führt zu sehr ungenauer Odometrie über Rotationssensoren.
- Kann zu übermäßigem Reifenverschleiß führen.
Konfiguration (b)
Die Vorderräder werden durch einen Lenkmotor geschwenkt und parallel zueinander gehalten. Die Hinterräder werden bei gleicher Drehzahl mit einem einzigen Fahrmotor angetrieben. Diese Art „Kompromiss“ mag zwar relativ einfach sein und weniger Motoren benötigen, hat jedoch alle Nachteile der Konfiguration (a) und keinen ihrer Vorteile. Die parallelen Lenkräder haben zwei IRCs, die eines oder beide zum Schleudern zwingen.
Konfiguration (c)
Die Vorderräder werden durch einen Lenkmotor, aber mit einer Ackermann-Verbindungsanordnung geschwenkt. Sie stellt die Radeinstellung für einen einzelnen IRC sicher. Die Hinterräder werden wieder von einem einzelnen Fahrmotor angetrieben, aber über eine Differentialeinheit, mit der die Räder je nach Lenkwinkeleingabe mit unterschiedlichen Geschwindigkeiten drehen können.
Merkmale der echten Lenkung
- Beseitigung aller seitlichen Schleuderkräfte.
- Präzise und berechenbare Wendungen.
- Genaue Odometrie.
- Mechanische Komplexität.
- Minimaler Wendekreis größer als bei der Panzerlenkung.
- Das Differenzial kann zu einem Totalverlust des Antriebs führen, wenn ein Antriebsrad vom Boden abhebt oder an Grip verliert.
6 bis 8 Räder
Die oben beschriebenen Prinzipien gelten ebenso für Fahrzeuge mit 6 oder 8 Rädern. Bei der Panzerlenkung werden lediglich zusätzliche Motoren oder Antriebskupplungen benötigt. Das Design für echte Lenkung und so ist bei dem Modell mit einem einzigen Fahrmotor unglaublich komplex: Bei Fahrzeugen mit 6 oder 8 Rädern werden zum Steuern normalerweise die vorderen 4 bzw. 6 Räder benötigt. Mehrere Differenziale im Antriebsstrang machen die Dinge schwieriger. Militärische Fahrzeuge sind in der Regel auf diese Weise gebaut, da mechanische Reparaturen und „Verpfuschungen“ für nicht-technische Mitarbeiter im Außendienst einfacher sind als elektronische/elektrische Systeme. Im Krieg sind diese Fahrzeuge entbehrlich und erfordern keine langfristige Zuverlässigkeit. Rover zur Erforschung von Planeten müssen mechanisch einfacher (weniger Gewicht) und wesentlich zuverlässiger (keine Reparaturen möglich) sein.
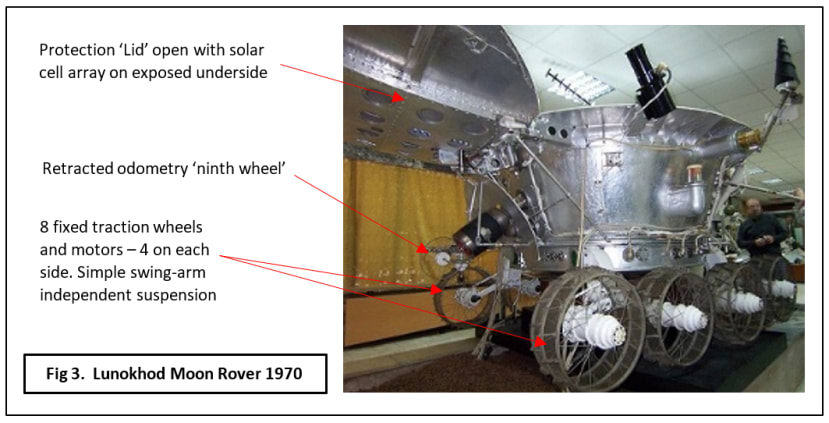
Rover-Designer sind aus zwei Gründen mit Gewichtseinschränkungen konfrontiert: Jedes zusätzliche Gramm erhöht die Kraftstoffkosten beim Start und bei zu viel Bodendruck können die Räder in die weiche, staubige Oberfläche des Mondes oder des Mars einsinken. Leichte und weniger robuste Strukturen können das erste Problem beheben, während bei dem zweiten Problem mehrere Räder oder sogar Gleisketten helfen können. Gleisketten werden normalerweise ausgeschlossen, da eine präzise Navigation, aber keine Manövrierbarkeit bei hohen Geschwindigkeiten erforderlich ist. Andererseits war der allererste Rover auf einem anderen Himmelskörper, der im November 1970 auf dem Mond gelandete Lunochod 1, mit 8 Rädern und Panzerlenkung ausgestattet (Abb. 3). Und ja, er sieht aus wie eine Blechwanne. Dennoch funktionierte er und ist mehr als 10 km gereist. Der Lunochod 2 hat eine Strecke von über 40 km in nur vier Monaten zurückgelegt.
Lunochod und die Mars-Rover
Die Lunochod-Rover hatten 8 feste Räder, die jeweils von einem eigenen Elektromotor angetrieben wurden. Die Motoren auf jeder Seite liefen mit der gleichen Drehzahl. Die Panzerlenkung wurde durch die Variierung der Geschwindigkeit zwischen den beiden Seiten bewirkt. Die Odometrie wurde von einem neunten nicht angetriebenen Rollrad bezogen, das hinter dem Rover hergezogen wurde. Diese Anordnung hat sich als wenig zufriedenstellend erwiesen. Später hat sich gezeigt, dass die zurückgelegte Entfernung ein wenig unterschätzt wurde.
Bis zur Pathfinder Mission der NASA im Jahr 1997, bei welcher der Sojourner mit 6 Rädern auf den Mars geschickt wurde, gab es keine weiteren Rover. Der Sojourner war spielzeuggroß, nur 65 cm lang und 48 cm breit und ein Technologie-Vorbild für die neue Generation an Planeten-Landern, die sich bewegen und erforschen konnten. Im Jahr 2004 folgten die Rover Spirit und Opportunity, gefolgt von dem noch größeren, atombetriebenen Rover „Curiosity“ im Jahr 2012 (Abb. 4). Der Nachfolger des „Curiosity“ soll 2020 landen. All diese Rover haben das gleiche 6-Rad-Mobilitätssystem, das auf einer „Rocker-Bogie-Federung“ basiert.
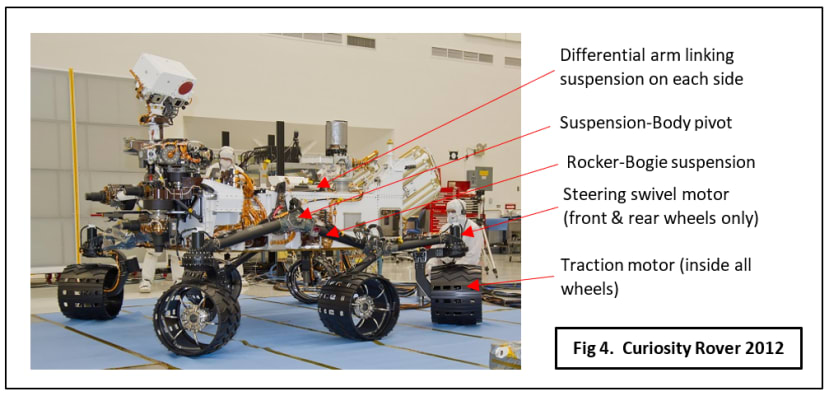
Beachten Sie, dass die vier „Eckräder“ für die Lenkung verwendet werden. In diesem Vorab-Foto ist der „Curiosity“ so eingestellt, dass er sich auf der Stelle dreht. Eine Einschränkung dieses Mobilitätssystems des Rovers besteht darin, dass der Motorregler die Fahrmotoren nicht gleichzeitig mit der Lenkung antreiben kann. Jedes Mal, wenn eine Kursänderung vorgenommen werden muss, kommt es zu einem langsameren Fortschritt. Als dieser Beitrag geschrieben wurde, hat der „Curiosity“ nur knapp über 19 km innerhalb von 6 Jahren zurückgelegt. Vergleichen Sie das mit der Strecke des Lunochod 2. Die Ziele dieser Mission waren natürlich ein wenig anders: Die Wissenschaft war während des Kalten Krieges in den 1970er Jahren in den Hintergrund getreten. Alles, was zählte, war Rekorde aufzustellen oder der Erste zu sein. Die Sowjetunion hat das Rennen um den ersten Menschen auf dem Mond verloren, könnte aber den am weitesten gereisten Roboter-Rover auf dem Mond vorweisen! Der „Curiosity“ (ursprünglich als „Mars Science Laboratory“ bezeichnet) musste sich mit Präzision bewegen, denn das Sammeln von wissenschaftlichen Daten hatte oberste Priorität.
Zu den Rovern mit 6 Rädern gehört außerdem der europäische Rover „ExoMars 2020“. Sehen Sie sich das Foto des Rovers an, das in Teil 2 dieser Serie zu sehen ist. Die Anordnung der Räder ähnelt weitgehend jener der NASA Rover, doch es gibt große Unterschiede. Zum einen hat der ExoMars 2020 keine Rocker-Bogie-Federung, sondern nur drei 2-Rad-Bogies, die sich um die Mitte drehen. Die vier Vorderräder sind auf jeder Seite an Bogies befestigt; der Bogie des Hinterrades wird auf der Rückseite des Rovers gedreht, so dass er im rechten Winkel zum anderen Bogie schwingt. Wie bei den anderen Mars Rover befinden sich auf allen sechs Rädern Fahrmotoren. Die Räder können im Gegensatz zu denen der anderen Rover alle gelenkt werden, so dass „Krabbenbewegungen“ möglich sind. Die „Beine“ der Federung werden unabhängig voneinander vor und zurück geschwenkt, sodass der Rover „läuft“. Der Rover kann zudem gleichzeitig alle Fahr- und Lenkmotoren antreiben. Dieses Paper enthält viele weitere Informationen zu den Mobilitätssystemen für den ExoMars Rover, der 2020 auf dem Mars landen soll.
Spaß auf zwei Rädern
Ich werde 3-Rad-Rover überspringen, da sie nicht für unebenes Gelände, sondern nur für glatte Lagerböden geeignet sind. Das Gleiche gilt für einen Buggy-ähnlichen Roboter mit 2 Rädern, der mithilfe von einem oder zwei Rollenrädern aufrecht gehalten wird (siehe Teil 2). Die meisten Bildungs-, Hobby- und Forschungsroboter sind auf diese Weise konfiguriert, da sie so sehr einfach zu bedienen sind. Obwohl die Roboter auf der Differenziallenkung basieren, haben sie einen einzigen IRC. Die Bewegung kann von einer geraden Linie bis zum Drehen auf der Stelle variiert werden, indem lediglich die relativen Geschwindigkeiten und die Drehrichtung der beiden Räder eingestellt werden. Sie sind nicht geeignet für den Mars, aber gut zum Lernen und Forschen.
Aufhängung
Die meisten kleinen, kommerziell erhältlichen mobilen Roboter haben keine Aufhängung. Das ist für glatte Böden kein Problem, aber was ist mit unebenem Gelände? Fahrzeuge verfügen in der Regel über Federn mit kurzen Bewegungen (nach oben und nach unten) und Dämpfer an jedem Rad mit den Einstellungen „steif“ für Sportwagen, die schnell einschlagen, und „weich“ für Straßenfahrzeuge, um einen höheren Fahrtkomfort zu ermöglichen. Geländefahrzeuge verfügen über eine lange Aufhängung, eine größere Bodenfreiheit für unebenes Gelände sowie Allradantrieb. Ein Planetenroboter benötigt diese Geländefunktionen ebenfalls. Die kurze, unabhängige Aufhängung des Lunochod-Rover ähnelt der eines Straßenfahrzeugs, da er für die Echtzeit-Fernsteuerung entwickelt wurde, um Hindernisse umfahren zu können, statt über sie zu klettern. Wie bereits erwähnt wurde er für das Fahren auf einer weichen, staubigen Oberfläche entwickelt.
Die Mars Rover wurden so gebaut, dass sie über hartes, steiniges Gelände fahren können und bei Bedarf über Hindernisse klettern, statt sie zu umfahren (Abb. 5). Der Hauptgrund dafür ist, dass diese Rover das Missionsziel haben, vorab festgelegte Punkte fernab der Landestelle zu erreichen. Wenn jeder Stein erst umfahren werden muss, können diese Ziele nie erreicht werden. Deshalb wurde ein Aufhängungssystem entwickelt, das den Kontakt aller sechs Räder mit dem Gelände unter allen Bedingungen sicherstellt.

Die Rocker-Bogie-Federung ermöglicht dem „Curiosity“, Hindernisse zu überwinden, die größer sind als der Raddurchmesser. Es gibt keine Federn, und die Baugruppe auf jeder Seite wird an nur einem Drehpunkt des Gehäuses aufgehängt. Jede Seite ist teilweise von der anderen Seite abhängig, jedoch befindet sich über der Oberseite des Gehäuses ein sich mittig drehender horizontaler Balken, der die beiden Differenzialarme miteinander verbindet. Dadurch wird verhindert, dass das Gehäuse auf die beiden seitlichen Schwenkgelenke schwingt. Außerdem wird die Bewegung des Kipphebels von einer Seite zur anderen übertragen. Wenn sich ein Vorderrad über einen Fels bewegt, bewegt sich der Differenzialarm zurück. Der Balken dreht sich, wodurch der Kipphebel auf der anderen Seite nach unten bewegt, das Gehäuse teilweise angepasst und der Bodendruck des Vorderrads erhöht wird. Das Interessante am Design ist, dass durch die Bogie-First-Konfiguration mehr Traktion erreicht wird. Ich bin mir nicht sicher, ob dies durch einen Zufall oder gezielt entdeckt wurde, aber die Rocker-First-Konfiguration beruht auf einer Absicht. Wenn der „Curiosity“ auf einer losen Oberfläche feststeckt, sollte er aufgrund der größeren Traktion in der Lage sein, rückwärts zu fahren. In diesem Paper wird das Mobilitätssystem für die im Wesentlichen ähnlichen MERs, den Spirit und den Opportunity, beschrieben.
Bauen Sie Ihren eigenen Rover
Echte Roboter werden mechanisch und elektronisch zu unglaublich komplexen Maschinen und erfordern immer komplexere Programmierungen, um nützliche Aufgaben ausführen zu können. Die meisten kommerziellen mobilen „Hobbyroboter“ sind 2-Rad-Buggy mit Rollen oder 4-Rad-Roboter ohne explizite Lenkart. Kein Roboter, den ich kenne, verfügt über ein Aufhängungssystem. Der Buggy lässt sich einfach von Grund auf herstellen und eignet sich hervorragend für die Entwicklung von Steuersoftware und für Tests von Sensor-, Navigations- und Kommunikationssystemen. Wenn Sie an einem „richtigen“ Mars Rover interessiert sind, einem Miniatur-Curiosity, haben NASA/JPL ein vollständiges Open Source-Design-Paket entwickelt, das Komponenten im Wert von 2.000 britischen Pfund enthält. Teuer für den Einzelnen, aber ideal für den Unterricht von MINT-Fächern.
Zum Schluss:
Die Planetenforschungsrover sind robust und zuverlässig, da sie naturgemäß in einer unbekannten, feindlichen Umgebung ohne Wartungsmöglichkeit eingesetzt werden. Der MER-Rover „Opportunity“, der 2004 gelandet ist, war noch bis Juni 2018 in Betrieb und hat nützliche Daten erfasst. Er wurde in den Ruhezustand versetzt (aus dem er hoffentlich aufwacht) als ein globaler Sandsturm den Planeten erfasste (was nichts Ungewöhnliches ist) und keine Sonnenlicht mehr zu seinen Solarzellen gelangte. In dieser Zeit hat er mit 45 km die weiteste Strecke zurückgelegt und so den Rekord des Lunochod gebrochen. Der atombetriebene „Curiosity“ ist derweil weiterhin im Einsatz. Hoffen wir, dass auch „Oppy“ bald aufwacht.
Wenn Sie mögen, folgen Sie mir auf Twitter. Ich verweise auf interessante Artikel über neue Elektronik und verwandte Technologien, und leite von mir entdeckte Tweets über Roboter, Weltraumforschung und andere Themen weiter.