火星探査ローバー用の走行制御を自作ロボに搭載(その4)
この記事を購読
 Dave from DesignSpark
Dave from DesignSpark
こちらの記事について、内容・翻訳・視点・長さなど、皆様のご意見をお送りください。今後の記事製作の参考にしたいと思います。
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
こちらの記事の感想をお聞かせください。
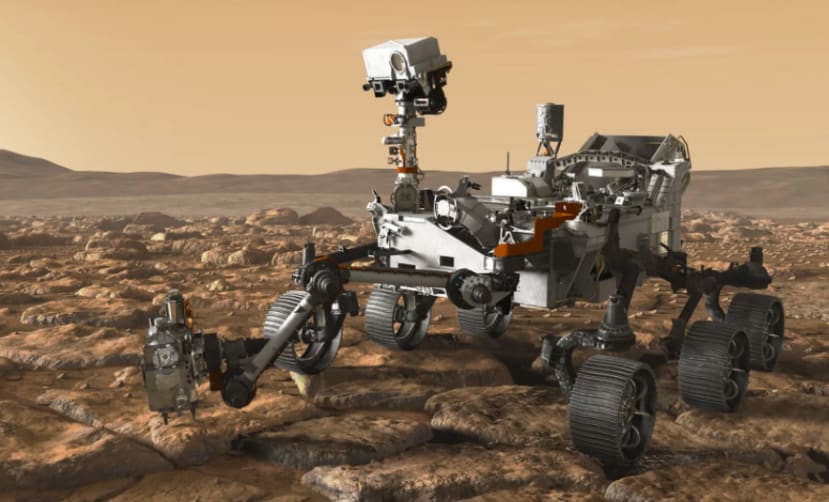
火星探査車(2020年) クレジット: NASA/JPL
車輪付きロボットは、2輪、3輪、4輪、6輪、8輪のものや、サスペンション有り/無しのものなど、多くの形態を取っています。滑らかな倉庫の床や、起伏のある予測不可能な火星の地表など、ロボットが移動する地形によって、何を選べば良いかが決まります。
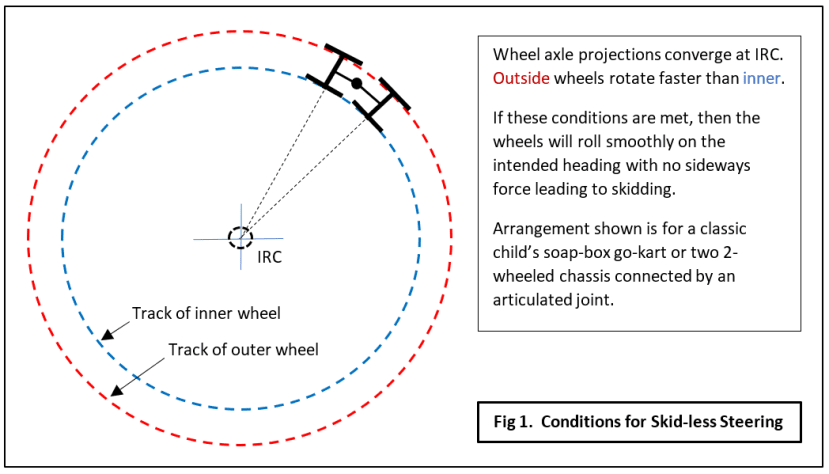
ステアリング方式は、主に「エクスプリシット」と「ディファレンシャル」の2つに分類されます。それぞれの方式は、さらに「トゥルー」と「スキッド」に分類される場合があります。トゥルーステアリングとスキッドステアリングのどちらを選択するかは、ロボットが実行すべき作業によって決まります。いずれもあらゆる地形に適していますが、2輪のマシンを除き、動作の精度と正確な測定が必要な場合は、エクスプリシットステアリング方式が採用されている必要があります。どのような場合でも、単一の瞬間回転中心(IRC)が設計に織り込まれている必要があります。正確なポジショニングを必要とする自律式又は半自律式探査車は、このようにして設計する必要があります。IRCの概念は理解しやすく、複雑な数学を必要とせず図で説明できます。図1は、シンプルに連結された4輪カートを、どのようにして横方向のスキッド力なく操作できるかを示しています。
4輪ロボット
図2では、さらに3種類のシンプルな4輪移動ロボットについて説明しています。正確に操作できるものもあれば、正確さは比較的劣るものの、はるかに操作しやすいものもあります。
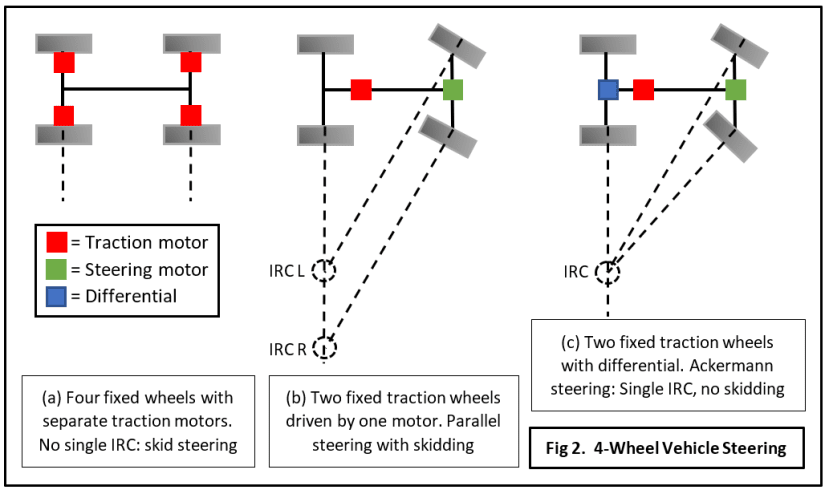
構成(a)
独立モータ付き固定ホイールです。ディフェレンシャルステアリングを使用できるため、片側のモータを内側のモータとは異なる速度で駆動させることができます。これは、トゥルーステアリングの1つの要件を満たしていますが、各前輪をターン時に同方向に回転させる必要はありません。つまり、ホイールを同じ方向に回転させ続けながら、速度の違いにより横方向に移動させることができます。その結果、横方向の力が摩擦を克服し、車両は新たな向きに横滑りします。通常は無限軌道車両で使用され、「タンクステアリング」とも呼ばれています。
スキッドステアリングの特徴
- 非常にすばやく方向を変えることができます(追加のモータ電源が必要です)。
- 各側のホイールを反対方向に回転させて、車両を即座にスピンさせることができます。
- 全輪駆動のため、起伏のある地形に適しています。
- 複雑な機械的リンク機構のないシンプルな設計です。
- 回転センサによりオドメトリをレンダリングしますが、精度は低くなります。
- 過度なタイヤの摩耗につながる場合があります。
構成(b)
前輪はステアリングモータによって旋回し、互いに平行に保たれます。後輪は単一のトラクションモータによって同じ速度で駆動します。こうした「折衷形態」は非常にシンプルでモータの数も少なくてすみますが、(a)の短所をすべて引き継ぎ、長所は一切引き継いでいません。パラレルステアリングホイールには2つのIRCが存在するため、1つ又は両方が滑ります。
構成(c)
前輪はステアリングモータによって旋回しますが、アッカーマンリンク機構配置により、単一のIRCのホイールアライメントを確保します。後輪は単一のトラクションモータによって駆動しますが、ディファレンシャルユニットにより、ステアリング入力によっては、異なる速度で回転させることができます。
トゥルーステアリングの特徴
- すべての横滑り力をなくすことができます。
- 正確で予測可能なターン。
- 正確なオドメトリ。
- 機械的に複雑。
- スキッドステアリングよりも大きい最小旋回範囲。
- ディファレンシャル動作により、駆動している1つのホイールが地面から離れたり、グリップを失ったりした場合に、まったく駆動しなくなる可能性があります。
6~8輪
以上に説明した原則は、6輪又は8輪にもあてはまります。スキッドステアリングでは、これはモータやドライブカップリングの追加につながる程度です。トゥルーステアリングの設計は、単一トラクションモータモデルに固執した場合には、非常に複雑になります。6輪又は8輪の車両には、通常、それぞれに4輪又は6輪の前輪で進む必要があり、ドライブトレインの複数のディファレンシャルにより問題はさらに複雑になります。軍用トラックは、通常、そうした方法で作られていますが、これは電子/電気システムよりも現場で技術に不慣れな人が、機械的修理や「一時しのぎ」の修理を簡単に行えるためです。戦時中は、こうした車両は使い捨てにされ、長期的な信頼性は必要ありません。惑星探査車は、機械的にシンプルかつ軽量であり、非常に高い信頼性を備えている必要があります(修理が不可能なため)。
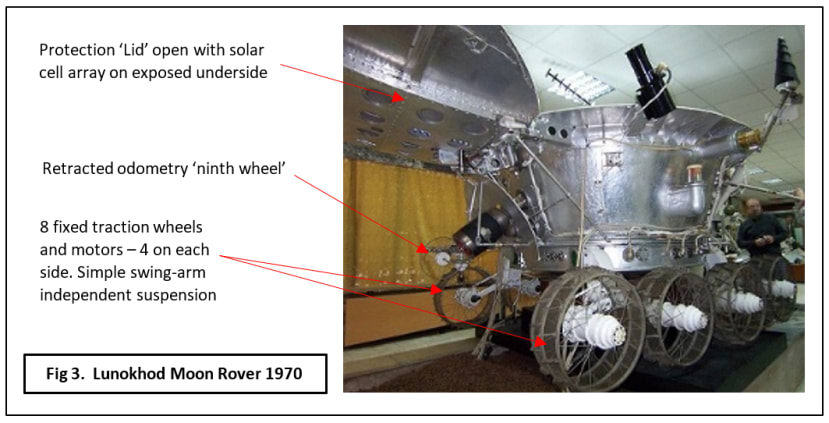
探査車の設計者は、2つの理由から、重量制限を迫られています。1つは、グラム数が増えるごとに起動燃料コストが増えること、もう1つは、接地圧が高くなりすぎると、月や火星の柔らかくほこりの多い地表にホイールが沈み込む可能性があることです。軽量で比較的堅牢性の低い構造は、1つ目の問題を軽減し、複数のホイールやキャタピラートラックは、2つ目の問題の解決に役立ちます。無限軌道については、正確なナビゲーションが必要で高速な機動性は不要なため、通常は除外されます。それでもやはり、最初のオフプラネット車両である1970年11月に月面に着陸したルノホート1は、8輪とスキッドステアリングを備えていました(図3)。さらに、亜鉛メッキを施したブリキの浴槽で作られたかのように見えます。それにもかかわらず、6マイル超にわたり機能し、移動しました。ルノホート2は、わずか4か月で26マイル超を移動しました。
ルノホートと火星探査車
ルノホート探査車には8つの固定ホイールが付いており、それぞれが独自の電動モータで駆動します。各側のモータはすべて同じ速度で動作し、2つの側の速度を変えることにより、スキッドステアリングが実現されます。オドメトリは、後部に装着されている9つ目の非駆動キャスターホイールから取得されました。こうした配置は満足のいくものではないことが判明しており、後に移動距離が若干少なく見積もられたことが示されました。
NASAのパスファインダーミッションで火星に6輪のソジャーナが降り立った1997年まで、それ以外の探査車は存在しませんでした。ソジャーナはトイサイズの長さ65cm、幅48cmの小ささで、動き回って探索することができる新世代の惑星着陸機の技術を実証しました。その後、2004年にそれより大型のスピリットとオポチュニティが着陸、2012年にはさらに大きな原子力を動力源としたキュリオシティが着陸しました(図4)。キュリオシティの後継車は、2020年に着陸する予定です。これらの探査車のすべてに、「ロッカーボギー」サスペンションをベースとした同じ6輪のモビリティシステムが使用されています。
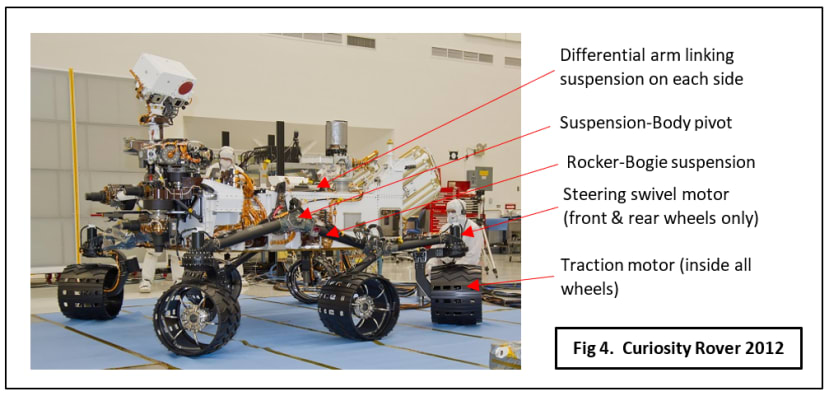
4つの「コーナー」ホイールがステアリング用に使用されていることがわかります。このローンチ前の写真では、キュリオシティに即座にターンできるよう配置されたホイールが装着されています。こうした探査車のモビリティシステムの制約は、モータコントローラがステアリングと同時にトラクションモータを駆動できない点です。コースを変更せざるを得ないたびに停止しなくてはならないため、ゆっくりとしか進めず、現時点では、キュリオシティは6年前の着陸以来、記録されているのはわずか12マイル超です。2台目のルノホートの進歩と比べてみてください。もちろん、ミッションの目標はやや異なっています。1970年代の冷戦により、科学は二の次となりました。記録を打ち立てることや、「最初に実現する」ことが重要視されました。ソ連は人間の月面着陸を果たす競争には敗北しましたが、移動距離の最も長い月面探査車を開発しました。科学的データの収集が最優先であったため、キュリオシティ(当初の名前はマーズ・サイエンス・ラボラトリー)には高い精度の動作が必要でした。
さらに、こうした6輪の分野には、欧州のエクソマーズ2020探査機があります。このシリーズのパート2を紹介している写真を見てみましょう。ホイールの配置はNASAの探査車と大体同じに見えますが、大きな違いがあります。第一に、「ロッカーボギー」サスペンションがなく、3つの2輪ボギーがそれぞれ中央の旋回軸に装着されています。4つの前輪は各側のボギーに装着されており、後輪のボギーは、他のホイールに対し適切な角度で回転するよう、探査車の後ろの旋回軸に装着されています。他の火星探査車と同様に、6つのホイールすべてにトラクションモータが搭載されています。異なる点は、すべてのホイールが駆動して「横ばい」が可能であり、サスペンションの「足」が前後に別々に回転するため、「歩く」ような動作が可能だという点です。さらに、この探査車はすべてのトラクションモータとステアリングモータを同時に動作させることができます。この文書では、2020年に月面着陸する予定のエクソマーズ探査車のモビリティシステムについてより詳しく説明しています。
2輪の楽しみ
3輪については、起伏のある地形には適さず、滑らかな倉庫の床に適しているため割愛します。直立させるための1つ又は2つのキャスターホイールが装着された2輪のバギータイプのロボットについても同じことが言えます(パート2を参照)。ほとんどの教育、趣味、研究用途のロボットには、その操作のしやすさからこうした構成が採用されています。ディファレンシャルステアリングをベースとしているにもかかわらず、単一のIRCが使用されているほか、2つのホイールの相対速度と回転方向を調整することにより、直線から即座のスピンへと動作を変えることができます。火星には適していませんが、学習や研究用途に最適です。
サスペンション
小型の市販モバイルロボットの大半は、サスペンションのような機能を搭載していません。これは滑らかな床では問題ありませんが、「オフロード」ではどうでしょうか。自動車の各ホイールには、通常、短いストローク向け(アップダウンの動作向け)のスプリングとダンパーが装着されており、スポーツカーについては「固い」足回りにして高速コーナリングを実現し、ロードカーについては「柔らかい」足回りにして乗り心地の良さを実現しています。オフロード車には長いストローク向けのサスペンションが装着されており、最低地上高を高くして、起伏のある地形や全車輪駆動を可能にしています。惑星探査車にも、こうしたオフロード機能が必要です。ルノホート探査車の短いストローク向けの独立したサスペンションは、ロードカーのサスペンションに似ていますが、これは、障害物をよじ登るのではなく、回避できるよう、リアルタイムのリモート制御に対応する設計となっているためです。先ほど示したように、柔らかくほこりの多い地表で速度を出せるように作られています。
火星探査車は、固く石の多い地形を移動し、必要な場合は障害物を回り込むのではなく、乗り越えることができるように作られています(図5)。その主な理由は、こうした探査車には、着陸地点から離れた、あらかじめ決定された地点に到着するというミッションの目的があるためです。目的地点までの道のりにある小さな岩をすべて回避して移動しなければならないと、その目的をいつまでも達成できない可能性があります。サスペンションシステムは、あらゆる条件下で6つのホイールすべてが地形にしっかりと接地できるよう設計される必要がありました。

「ロッカーボギー」サスペンションにより、キュリオシティは車輪の直径よりも高い障害物を乗り越えることができます。スプリングがなく、各側のアセンブリがボディからわずか1つのピボットポイントで吊り下げられています。各側は完全に独立しているわけではなく、ボディ上部を交差して、2本のディファレンシャルアームをつなぐ中央旋回式の水平梁が付いています。これにより、ボディが両側のピボット上でランダムに回転することを防ぐほか、片側のロッカーアームの動きをもう一方の側に伝えることができます。1つの前輪が岩を乗り越えると、ディファレンシャルアームが後方に動き、ビームが回転してもう一方の側のロッカーを下げ、ボディを部分的に水平にして、前輪の接地圧を高めます。この設計の興味深い点は、ボギーを優先的に動作させることにより、優れたトラクションを達成できる点です。これはたまたま発見されたのか、設計によるものなのかは確かではありませんが、ロッカー優先の構成はかなり熟考されたものです。キュリオシティが柔らかい地表にはまり込むと、優れた後方のトラクションにより後退することができるため、トラブルを避けることができます。この文書では、基本的に火星探査車に類似したスピリットとオポチュニティのモビリティシステムについて説明しています。
独自の探査車の構築
実際のロボットは機械的にも電子的にも非常に複雑な機械となっており、有益な作業を実行させるためには常に高度化しているプログラミング(コーディング)を行う必要があります。市販の「趣味」向けのモバイルロボットの大半は、キャスター付きの2輪バギーか、又はエクスプリシットステアリング方式が採用されていない4輪である傾向にあります。私の知る限りにおいては、サスペンションシステムの機能は備わっていません。バギータイプは一から簡単に作成できるほか、制御ソフトウェアの開発やセンサ、ナビゲーション、通信システムの試用に適しています。キュリオシティのミニチュアのような「厳密な意味での」火星探査車を好む場合は、NASA/JPLがすべてを網羅したオープンソースの設計パッケージを出していますが、コンポーネントには約2,000ポンド必要です。個人用としては高価ですが、大学のSTEM教育には最適です。
最後に
惑星探査車は、当然ながらメンテナンスが不可能な、マニュアルの存在しない過酷な環境で作業するため、堅牢で高い信頼性が得られるよう設計されています。2004年に着陸した火星探査車のオポチュニティは、今年2018年の6月まで動作し、有益なデータを収集していました。広範囲にわたる砂嵐が火星を覆い尽くし(珍しいことではありません)、太陽電池パネルから日光を遮ってしまったため、現在はハイバネーション(休止)モードとなっていますが、復活が期待されています。この間、オポチュニティは最も遠くまで移動した探査車となり、28マイル超を移動してルノホートの記録を塗り替えました。一方、キュリオシティは「原子力を動力源とする」探査車であるため、こうした状況とは関係なく動作し続けることができます。近いうちにオポチュニティが目覚めることを祈ります。
行き詰ってしまった場合は、是非Twitterで私の投稿をフォローしてください。新しいエレクトロニクスと関連技術、ロボットについて目星をつけた投稿のリツイート、宇宙探査などの興味深い記事にリンクしています。