Ein Eigenbau-Antennenmesssystem, Teil 1: Einführung
Artikel folgen
 Dave von DesignSpark
Dave von DesignSpark
Wie finden Sie diesen Artikel? Helfen Sie uns, bessere Inhalte für Sie bereitzustellen.
Dave von DesignSpark
Vielen Dank! Ihr Feedback ist eingegangen.
Dave von DesignSpark
There was a problem submitting your feedback, please try again later.
Dave von DesignSpark
Was denken Sie über diesen Artikel?
Durch die Integration eines ebm-papst EC-Motors mit einem RevPi Core für die Steuerung und einem LimeSDR Mini zum Erzeugen und Empfangen von Signalen entsteht ein System, das die Antennenleistung misst.
Hier sehen Sie die neue Reihe von K4-Antriebssystem-Entwicklungskits, wie DesignSpark sie hier in der Vorschau zeigt.

Das Antennendesign ist einer dieser faszinierendsten Bereiche, die praktisch den Anschein einer magischen Kunst erwecken können. Die kleinsten Designänderungen können eine große Wirkung haben, es gibt unzählige innovative und oft völlig kontraintuitiv zu handhabende Designs und es bleibt ein Bereich intensiver Forschung und Entwicklung.
Für die Modellierung der Antennenleistung gibt es Software, aber nach der Konzeption eines Designs möchten Sie die Leistung schließlich messen. In dieser Reihe von Beiträgen verfolgen wir den Fortschritt des Designs und der Entwicklung eines kostengünstigen Systems, das stark auf dem Open-Source-Projekt Enhanced Machine Controller Antenna Range (EMCAR) basiert.
Grundlagen
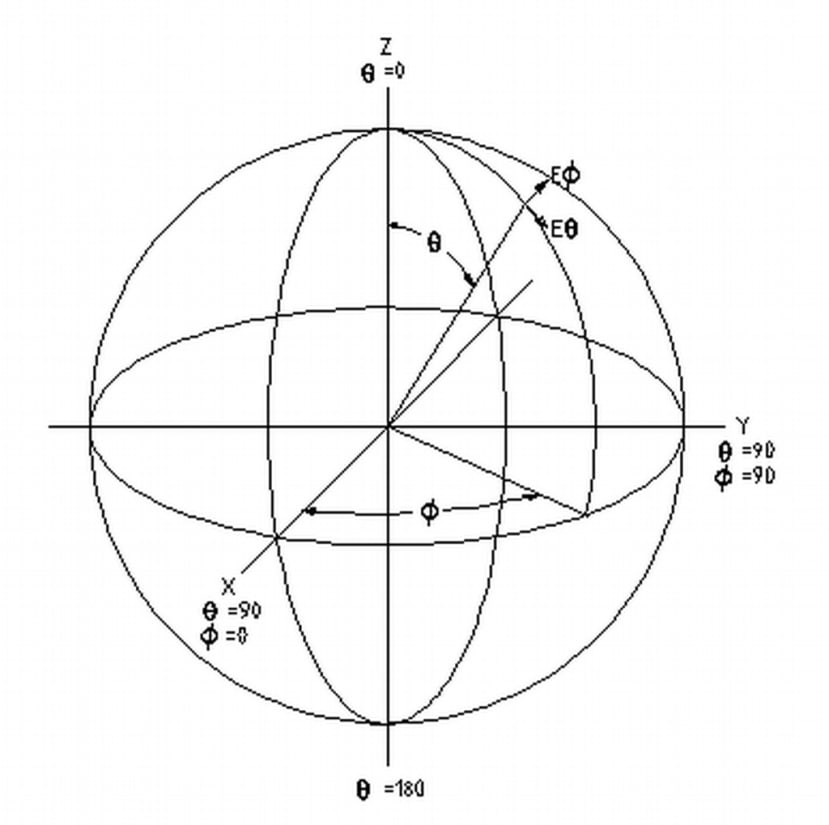
Koordinatensystem für Antennenmessungen nach IEEE-Standard 149-1979 (Quelle: EMCAR-Projekt)
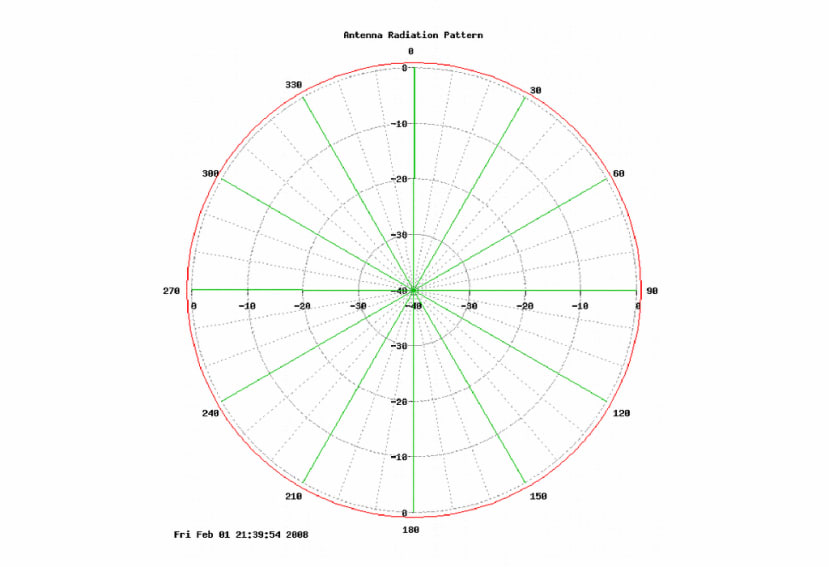
Wir sind an der Messung des Antennenstrahlungsmusters interessiert und in diesem Fall wird die Ausgabe ein 2D-Polardiagramm sein. Es ist möglich, dass wir in Zukunft das Design so verbessern, dass es 3D-Plots erzeugen kann, aber 2D ist jetzt ausreichend und zeigt uns die Antennenverstärkung in Vorwärts-/Rückwärtsrichtung und zu den Seiten usw. Das ist die Art von Informationen, die wichtig sind, wenn beispielsweise eine omnidirektionale Antenne, eine Antenne mit hoher Verstärkung und hoher Richtcharakteristik für eine Punkt-zu-Punkt-Verbindung oder eine Antenne mit schmalem Winkel und Eignung zur Verwendung mit mehreren Antennen in Sektoren benötigt wird.
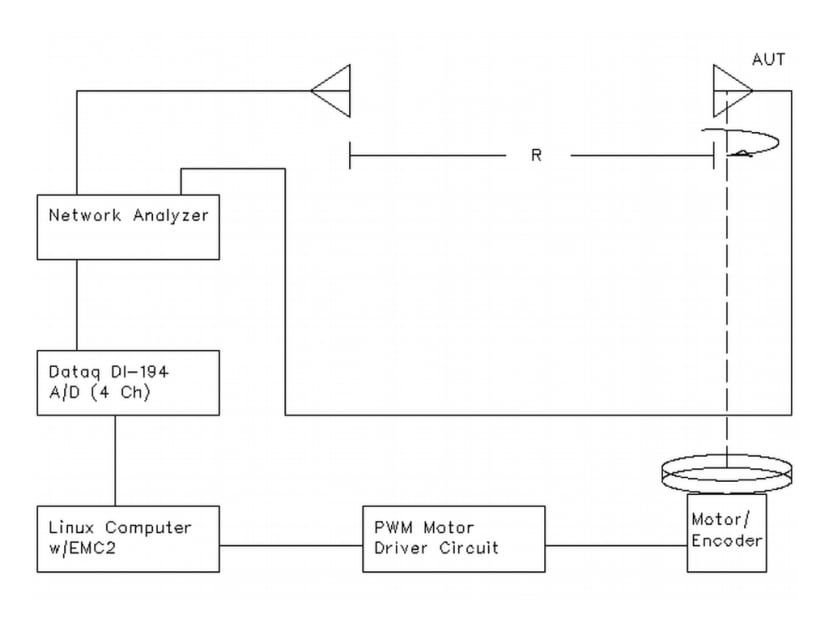
Blockdiagramm des Antennenmesssystems (Quelle: EMCAR-Projekt)
Das Grundprinzip ist eigentlich ganz einfach. Wir haben unsere zu testende Antenne auf einer rotierenden Plattform befestigt, wobei eine zweite, feste Antenne in einiger Entfernung platziert ist. Beide sind mit einem HF-Netzwerkanalysator verbunden und wenn die erste Antenne gedreht wird, werden Messungen durchgeführt. Ganz simpel.
In unserem Fall verwenden wir keinen umfassenden Netzwerkanalysator, sondern eine einfachere, kostengünstige Lösung, die auf dem Software-Defined-Radio (SDR) LimeSDR Mini basiert.
Motor

Der Motor ist eine Schlüsselkomponente und seine Leistung ist mit der Leistung unseres Messsystems verknüpft. Wir müssen genau wissen, wo sich der Motor befindet, und wenn wir nicht möchten, dass der Vorgang lange dauert, muss seine Bewegung sehr gleichmäßig sein (ansonsten könnte das zum Wackeln der Antenne führen und wir müssen zwischen den Bewegungsschritten möglicherweise eine Pause einlegen).
Die motorisierte Plattform kann so klein oder groß sein, wie Sie möchten. In unserem Fall wollten wir etwas von einer angemessenen Größe haben, das wir bei Bedarf in Zukunft problemlos erweitern können, indem wir eine viel größere Plattform darauf befestigen. So können wir später größere Antennenstrukturen direkt mit einem Stativ oder einer anderen Halterung daran befestigen. Das bedeutet, dass wir einen stabilen Rahmen benötigen, der die Plattform stützt, darunter ein festes Lager und einen entsprechend leistungsstarken Motor, der die Plattform antreibt.
Es gibt viele Optionen, die uns offenstehen, und wir hätten mit einem Schrittmotor arbeiten können, wie im ursprünglichen EMCAR-Design vorgesehen. Wir könnten auch Riemen und Riemenscheiben verwenden, um die Geschwindigkeit zu verringern und eine weichere Bewegung zu erzielen. Wir haben uns jedoch für einen elektronisch kommutierten Motor von ebm-papst (187-2145) mit integrierter Treiberelektronik und Getriebe entschieden, der nach der Programmierung eine sehr einfache Schnittstelle für die Steuerung und eine leichtgängige Bewegung bietet.
zu steuern

Das Steuerungssystem basiert auf einem Kunbus Revolution Pi Core (181-1141) , der problemlos um zahlreiche industrielle Analog- und Digital-E/A erweitert werden kann. Damit stehen uns eine Vielzahl von Programmieroptionen zur Verfügung und wir werden höchstwahrscheinlich eine Mischung aus Python- und vorhandenem C-Code aus dem EMCAR-Projekt verwenden.
HF-Messung
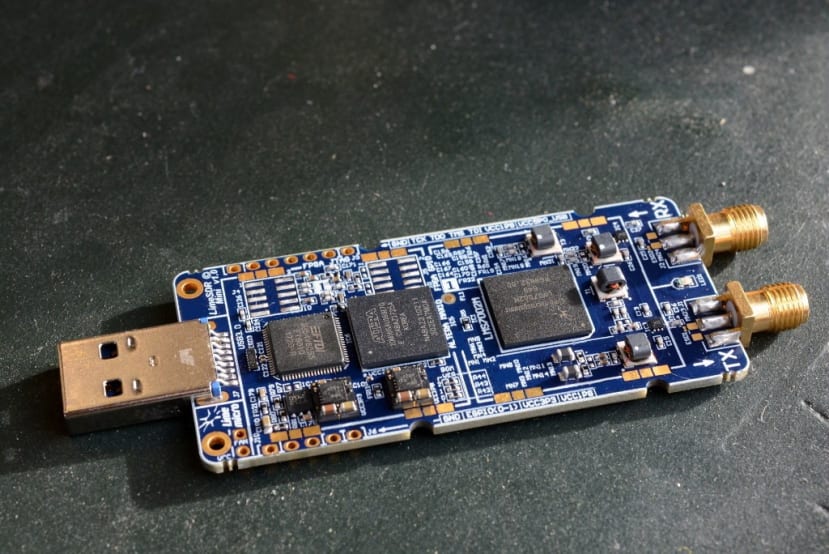
Wir haben jetzt also die Möglichkeit, unsere zu prüfende Antenne zu drehen und ihre Position und den Messvorgang zu steuern. Wir müssen nun die HF-Verbindungsmessungen durchführen. Dazu verwenden wir den kostengünstigen LimeSDR Mini SDR, um Signale mit den gewünschten Frequenzen zu erzeugen und diese an der empfangenden Antenne zu messen.
Weitere Schritte
Im nächsten Beitrag behandelt mein Kollege Dave das Design und die Prototypenerstellung des kombinierten Gehäuses für die Elektronik und die mechanische Tragkonstruktion der Plattform, zusammen mit dem Plattformdesign, dem Lager und der Motorkopplung.