Plattform für die Entwicklung autonomer Systeme
Artikel folgen
 Dave von DesignSpark
Dave von DesignSpark
Wie finden Sie diesen Artikel? Helfen Sie uns, bessere Inhalte für Sie bereitzustellen.
Dave von DesignSpark
Vielen Dank! Ihr Feedback ist eingegangen.
Dave von DesignSpark
There was a problem submitting your feedback, please try again later.
Dave von DesignSpark
Was denken Sie über diesen Artikel?
Mein Interesse an der Robotik wurde ursprünglich geweckt, als ich im Verteidigungssektor arbeitete. Ich stellte fest, dass die größten Investitionen der Entwicklung sogenannter „autonomer Systeme“ gewidmet wurden, mit einer Bandbreite verschiedener Anwendungen von der Meerbodenkartierung, Ozeanographie bis sogar zur Minensuche, um den Entwicklungen im Marinebereich mit unauffälligen High-Tech-Fahrzeugen für kleinere Besatzungen zu begegnen. Jetzt arbeite ich natürlich in der Automobilindustrie und habe festgestellt, dass mehr Menschen sich dieser Fortschritte im Zusammenhang mit Technologien zum autonomen Fahren bewusst sind. Das liegt wohl nicht zuletzt an der Begeisterung, die von großen Technologieunternehmen geschürt wird, während sie daran arbeiten, ihre Entwicklungen für die Öffentlichkeit zu optimieren.
Angesichts der Tatsache, dass diese Technologie die treibende Kraft hinter der Robotik heutiger Tage ist, habe ich mich inspirieren lassen, eine modulare und konstrukteursfreundliche Plattform für die Entwicklung autonomer Systeme mit meinem eigenen Design zu bauen. Meine Entwicklungsarbeit wird in diesem Artikel dokumentiert.

Teileliste:
- 4 250-mm-Räder ausschließlich aus Kunststoff und Gummi
- 4 8-mm-Wellenkupplungen mit Gewindestiften
- 4 12-V-DC-Getriebemotoren
- 4-adriges mehrsträngiges Kabel
- 2 IP68-Kabelverschraubungen
- Allzweck-Schrumpffolie
- M8-Stehbolzen
- einfache M8-Sechskantmuttern (Verwenden von Nyloc möglich)
- M8-Schrauben
- M8-Unterlegscheiben
- Gehäuse Gewiss GW-44-207 IP56
- 1.500-mAh-Li-Ion-Akku
- Per 3D-Druck selbst angefertigte Akkuhalterung mit M4x30-Halteschraube und Mutter
- Molex-Steckverbinderbaugruppen
- Einadriges Kabel
- Selbstschneidende M4-Schrauben
- Spezielle Leiterplatte
- 3-mm-Aluminium-Montageplatte
- Einpoliger Ein/Aus-Schalter
Es sollte angemerkt werden, dass ich beim Design dieses Projekts äußerst gründlich vorgegangen bin, was eine Menge CAD-Arbeit mit der Software DesignSpark PCB und DesignSpark Mechanical eingeschlossen hat.
Chassis
Die Seitenabdeckungen des Chassis aus Aluminium werden für die Montage der Motoren und des Elektronikgehäuses verwendet, während gleichzeitig der Stehbolzen befestigt wird, der den mechanischen Aufbau komplettiert. Ursprünglich wurde das Chassis von Hand aus rostigem Schrottmetall gefertigt, was ausgezeichnet funktionierte, aber ein bisschen grob ausfiel. Deshalb entschied ich mich für den Einsatz von CAD zum Schneiden neuer Chassis-Panels mithilfe einer geeigneten CNC-Machine und leichtgewichtigem Aluminium. Die Zeichnung ist unten zu sehen.

DesignSpark Mechanical
Motoren
Jeder der Hauptantriebsmotoren ist an den Seitenverkleidungen des Chassis mit jeweils vier M4-Schrauben montiert. Die gewählten Motoren haben ein hohes Übersetzungsverhältnis zugunsten eines höheren Drehmoments, das erforderlich ist, um die an die einzelnen Rotoren angebrachten Räder zu drehen. Der Allradantriebseffekt der Motoren verleiht dem Roboter hervorragende Traktion. Bisher habe ich ihn schon ohne Schlupf eine 45-Grad-Holzrampe hinauffahren lassen und ihn durch Einfahren in eine senkrechte Ziegelwand umkippen lassen, um den Umkehrbetrieb zu testen.
Der Roboter wurde nicht dafür konstruiert, wie ein konventionelles Fahrzeug mit komplexem Lenkgestänge zu fahren. Vielmehr sollte er unebenes Gelände aggressiver bewältigen, ähnlich wie ein Panzer, der mithilfe seines Allradantriebs auf der Stelle wendet. Beachten Sie, dass sich das Spurhalteverhältnis nicht an Idealwerten (1:1,6) wie im Automobildesign orientiert, sondern vielmehr ein Verhältnis 1:1 zugunsten eines perfekten Giermoments bei der Rutschsteuerung verwendet.

Räder
Die ausgewählten großen und massiven Kunststoff- und Gummiräder machen die Plattform mit einer guten Mischung aus Traktion und Bodenfreiheit hervorragend geeignet in schwierigem Gelände. Tatsächlich kann das Chassis des Roboters aufgrund des Schutzes durch die Räder auf weitem und ebenem Untergrund keinesfalls aufsetzen. Die Räder sind mit Hilfe einer auf halbem Weg superfest in die Hohlachse der Räder eingeklebten 8-mm-Wellenkupplung, die jeweils einen Gewindestift für die Befestigung des Rades an der Motorwelle freilässt, an den Motorwellen befestigt.

Gehäuse
Das ausgewählte Gehäuse ist IP-konform in Hinblick auf Spritzwasser oder Regen, denen es in der Betriebsumgebung ausgesetzt sein könnte. Es ist mithilfe vorgefertigter Bohrungen für zwei M8-Schrauben, Muttern und Unterlegscheiben auf jeder Seite am Aluminiumrahmen befestigt, was zur Stärke der Gesamtstruktur beiträgt. Das Gehäuse hat weitere vorgefertigte Bohrungen für die IP-konformen Kabelverschraubungen vorn und hinten am Gehäuse und eine für den Ein-/Ausschalter auf der Rückseite.

Design der Leiterplatte und des Steuerungssystems
Das Standardsystem wurde so konzipiert, dass es als ROV bzw. „ferngesteuertes Fahrzeug“ mit der Möglichkeit für einfache Telemetrie betrieben werden kann. Es kann mit dem erweiterten E/A-Modul ergänzt werden, das in den Kits vieler Hersteller zu finden ist, wodurch eine schnelle und einfache Erweiterung in ein komplett autonomes System möglich wird.
Die aus dieser Entwicklungsmentalität resultierende Hardwarearchitektur umfasste auch die Verwendung eines aktivierbaren Bluetooth-Sende-/Empfangsteils zugunsten einer Steuerung und Telemetrie per Smartphone und einen Atmel ATMEGA328P-PU-IC mit Arduino-Bootloader für einfache UART-Programmierung sowie Analog-, I2C- und SPI-Schnittstellenklemmen für den Anschluss von vielen ICs, Abschirmungen und Entwicklungsplatinen einschließlich des Raspberry Pi.
Die Stellgliedsteuerung wurde mit einem Paar MOSFET-H-Brückenschaltungen realisiert, die über PMW-kompatible digitale Pins des ATMEGA gesteuert werden. Die Stromversorgung für die Schaltung war ein Li-Ion-Akku 1.500 mAh/11,1 V, aber die Mikrocontrollerlogik wurde auf 5 V heruntergeregelt, was zurück auf die 11,1 V gepuffert werden musste, um die Stromversorgung der Motoren zu gewährleisten. Es wurde darauf geachtet, zusätzliches Lötmittel auf die Kupferbahnen der Leiterplatte zu legen, um I2R-Verluste und übermäßige Wärmeentwicklung durch den Stromfluss zu minimieren.

DesignSpark PCB
Akku und Leiterplatte wurden mit einadrigem Kabel verbunden und mit einem einfachen Kippschalter in Reihe ein- und ausgeschaltet. Mit einigen Molex-Steckverbinderbaugruppen sorgte ich dafür, dass der Akku leicht herauszunehmen ist, damit er geladen werden kann, ohne dass irgendwelche Anschlussklemmenblocks auf der Leiterplatte abgeschraubt werden müssen. Ein vieradriges mehrsträngiges Kabel wurde für die Verbindung der Motoren mit der Vorder- und Rückseite verwendet, wobei die H-Brücken jeweils den linken und rechten Motorkanal steuern.
Ich beschaffte die Leiterplatte von Eurocircuits mithilfe des kostengünstigen Onlinedienstes „NAKED proto“ des Unternehmens.
Akkuhalterung per 3D-Druck
Ein Problem mit dem Vorgängerdesign war das Klappern des Akkus, wenn die Plattform sich umherbewegte. Ich fasste den Entschluss, den Versuch zu wagen und den Akku mit einer einfach zu handhabenden internen Halterung zu befestigen, um das Design robuster zu gestalten. Mit DesignSpark Mechanical konnte ich auf die Schnelle einen Entwurf anfertigen und anschließend für den Druck aus PLA exportieren. Mithilfe dieses Designs und mit zusätzlichen M4-Schrauben konnte ich den Akku fest verankern und musste mir keine Sorgen mehr machen, dass er an irgendwelche Leiterplattenkomponenten stoßen könnte.

DesignSpark Mechanical
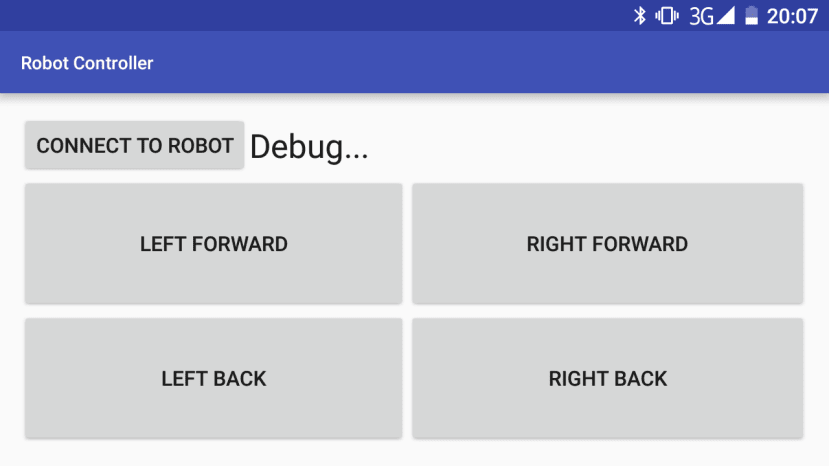
Smartphone-App
Die Verwendung eines Bluetooth-Sende-/Empfangselements im Steuerungssystem machte die einfache Vernetzung im IoT-Stil und die unmittelbare Steuerung von mechatronischen Elementen der Plattform möglich. Die aufregendste Anwendung dieses Aufbaus ist der Fernbedienungsmodus, der über eine sehr einfach Android-Smartphone-App zum Tragen kommt, um die Richtungssteuerung des linken und rechten Rads auszuüben. Das Neuartige der Bluetooth-Steuerung ist, dass dafür kein eigenständiger Controller, sondern nur ein verbreitetes Smartphone oder Tablet notwendig ist, das häufig genutzte ISM-Frequenzbänder verwendet. Allerdings bedeutet es auch, dass die Signalreichweite klein ist und dass künftige Designänderungen der Plattform ein verbessertes Funksystem und eine leistungsfähigere Basisstation erfordern werden, damit ausgedehntere Missionen möglich sind.
Video
Fazit
Dieses Projekt war eine Weiterentwicklung dessen, was ich im Rahmen meiner Diplomarbeit unternommen hatte. Dabei war die Plattform im Gleichschritt mit meinem Interesse an autonomer Robotik und der Technologie für autonomes Fahren immer größer geworden. Laufend fand ich Inspirationen in der breiten Palette beeindruckender Aufgaben, die entsprechende Maschinen lösen konnten, und ich würde nur allzu gern das in einem größeren Maßstab umsetzen, was ich bis jetzt auf dem Gebiet von Entwicklungsplattformen für autonome Geländefahrten erreicht habe, zum Beispiel für die Rallye Dakar. Und ganz bestimmt werde ich weiterhin an der Entwicklung entsprechender Ideen arbeiten, während meine Ziele immer ehrgeiziger werden.