驱动车轮:PMDC 电机选型技巧
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
停放在欧洲航天局“火星场”的 ExoMars 测试火星车 (ExoTeR)。 图片来源:欧洲航天局
前几天,我在贴文驱动车轮:将 PMDC 电机与微控制器对接中介绍了接口硬件以及如何使用 PWM 控制电机转速。有一名 DesignSpark 会员在回贴中提到了 PMDC 电机选型问题,所以,我想在这里谈谈如何为特定项目选择 PMDC 电机。我的这种方法是基于一种高度简化的设计流程,应该能够“大致”得到您所需的电机参数。
主要特点
首先,大家要看一下我上次贴文中给出的(以及下面图 1 中的)扭矩与速度关系图。最先需要确定的三个电机参数为失速扭矩(有时称为启动扭矩)、运行扭矩以及空载转速的值。以两轮小车移动机器人为例,您需要找出每个车轮需要多少扭矩才能克服阻力,让机器人移动。如果您知道车轮与地面之间的摩擦系数和静摩擦力等参数的充足数据,就有可能从头计算出您所需知道的各种信息。但是,除非您是一名工程师,正在为美国宇航局打造下一艘火星车,否则您就没必要在这方面浪费精力和时间。最好先做小车,在不装电机和变速箱的情况下做些试验。

测力
您要有些测力工具,如果是小型机器人,您得有一个精度校准至克的简单弹簧称;如果是大型机器人,使用精度为千克级的弹簧称就足够了。要实现更高准确度,您可以选用数字测力仪,但这种工具可不便宜。要找出失速扭矩和运行扭矩的大致范围,请在水平面上使用弹簧称拖动您的机器人(不含电机)。从静止开始,增加牵引力直至小车开始滚动,并记下弹簧称读数。该读数将提供小车克服静摩擦力所需的力。如果您继续以理想的运行速度拉动机器人,就可以读出运行力,这个力会小于之前克服摩擦力所需的拉力。这里有个复杂的换算关系,以克/千克(或者磅/盎司)校准的弹簧秤是用于测量重量。不过,您只需乘以一个常数即重力加速度 9.81m/s2 就可以将千克换算为牛顿。
计算扭矩
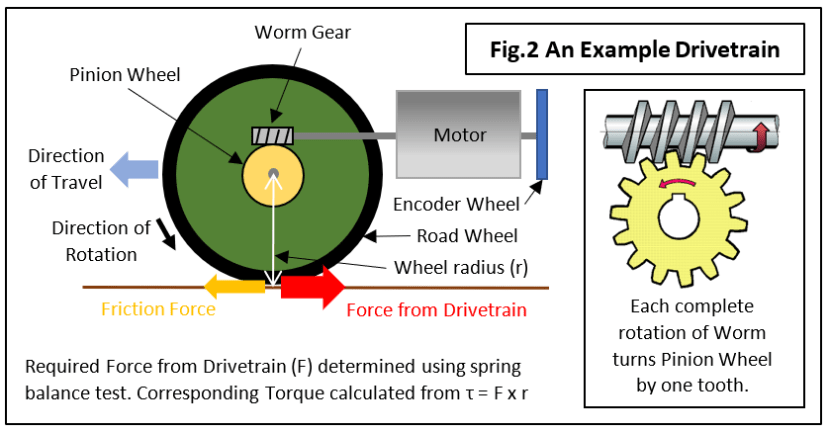
我们已通过试验得到了让机器人移动所需的线性力估算值,现在需要挑选一台合适的匹配电机了。问题是我们测出的是所需线性力,但电机提供的参数却是旋转力或扭矩 τ。而这正是车轮的作用:将旋转运动转变为机器人在地面上的直线运动。图 2 所示为移动机器人传动系统的一个示例,该系统采用了蜗杆和小齿轮变速箱,以将电机转速分解为更实用的车轮转速。现在可以得出,车轮扭矩(牛顿米)= 线性力 x 车轮半径,或者:
τ = F x r Nm
使用该式以及之前所测较大的启动力,就可以算出传动系统所需提供的启动扭矩。计算车轮运行扭矩时同样使用该公式。请注意,这个项目有两个传动系统,所以每个电机所需提供的扭矩为计算值的一半。
在将这些扭矩值与合适的电机匹配之前,需要计算出减速比。这意味着您必须决定机器人在地面上的移动速度。对于小型机器人,比如说用于解迷宫的微型机器人,也许可选用 40 cm/s 的速度。小型业余电机在额定电压下的空载转速一般为 6000 rpm 左右,在 5400 rpm 左右的转速下效率最高(见图 1)。与该转速对应的扭矩仅为 10% 的空载扭矩,所以我们退一步,取 4000 rpm 的转速,此时对应的扭矩为空载扭矩的 20%。与蜗轮啮合的 16 齿小齿轮可产生 16:1 的减速比,对应的车轮转速为 4000/16 = 250 rpm。减速器还具有让扭矩倍增的好处。在本例中,这意味着速度降低了 16 倍,而车轮上可用的扭矩就增加了 16 倍。这表示我们可以选用更小的发动机,变速箱可真是伟大的发明。
针对车速或牵引力选择车轮
微型机器人车轮的直径大约为 3 cm:这个尺寸对于这么小的车辆来说已经相当大了。您为项目选择合适车轮时,可遵从一条简单规则:高速就选大直径,而车轮越小牵引力就越大。跑车和小型机器人都要追求速度,所以车轮都很大。而重型货车的车轮就比较小,以便以较慢的车速运载重物。火星车的运动速度都非常慢,而且需要巨大的牵引力,以爬过崎岖地形上的障碍物。从上面的扭矩方程可以看出:减小车轮直径可降低传动系统所需的扭矩,但代价是车速变慢。或者,保持电机扭矩,以获得更快的加速度和更高的爬坡能力。
下面这个简单公式用于将单位为 cm/s 的线性速度 SL 转化为单位为 rpm 的 SR 转速:
SR = 60/πD x SL RPM 式中 D 为车轮直径(单位 cm)。
代入本例的 SL = 40 cm/s 和 D = 3 cm,可得出 SR = 254 rpm。正是我们想要的数字!
功率和效率
PMDC 电机的参数表有时会包含机械(轴)功率和效率与转速的关系图(图 1)。这些曲线图可能具有误导性,因为每条曲线都需要自己的垂直轴值,而且很难发现每条曲线之间的关系。所以,我将坐标轴标定为了 0 到 100% 最大值。
电机效率是指机械输出功率(做有用功的部分)与输入的电力功率的比值。由于以下种种原因,这个比值永远无法达到 100%:
- 构成电机绕组的导线不是理想导体,而是含有较低的电阻 R。因此,功率会以热量的形式损失,计算公式为 PI= I2R,其中 I 为电枢电流。
- 旋转的电枢会受空气阻力的影响,这种功率损失称为绕组功耗。该损失在零转速时显然为零,但与转速的立方成比例。
- 其他损失还包括轴承/电刷摩擦以及铁芯内的涡流所导致的损失。
利用以下公式,可绘出轴功率与转速之间的曲线关系图:
PS = τ x ω W 式中 τ = 扭矩(单位 Nm),ω = 转速(单位弧度/秒)。
从图 1 可以看出,在失速扭矩的一半处轴功率最高。我在上例中已经暗示过,最高效的运行速度接近空载值。但为什么最大功率输出不是出现在 50% 处呢?为了证明这一点,我们需要一个效率与速度的关系图:
效率 = PS/(PS+PL) x 100 %,式中 PS = 轴功率;PL = 由于 I2R 和绕组损耗导致的功率损失。
从提到的效率图可以看出,这台电机的效率从零到大约 85% 之间一直呈良好的线性上升趋势,随后急剧下降并在空载转速处降至接近零的水平。如果忽略绕组损耗,效率应该会继续上升到大约 95%,但不会达到 100%,因为在最高转速下仍会存在小电流导致的热量损失。绕组损耗导致效率急剧下降的原因在于旋转电枢所要克服的空气阻力会随着速度接近最大值而大幅增加。
选择“甜蜜点”
在取舍轴功率和能源损耗时,最佳的折衷点就位于效率曲线的峰值处或峰值之前。I2R 损耗所导致的过热问题会使得电机在最大轴功率点或附近连续运行时可能会出现问题。如果可能出现这种问题,就需要进行热计算,以确保不超过最高工作温度。
添加反馈控制
以上所有计算都是基于一个假设:电机是在能够产生最大失速扭矩和空载转速的额定电压下运行。在负载扭矩可能变化的应用中,例如移动机器人遇到斜坡时,速度也会随之变化。有时可能不允许这种速度变化,这就需要添加一个基于速度传感器的反馈控制系统,以通过增加端子电压来增加给定速度下的扭矩。显然,只有机器人以“平地”车速行驶时,所需的电压小于最大额定电压时,才可能有余量提供爬坡所需的更高扭矩。有关更多信息。请阅读这篇有关 PID 控制的文章。