
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
上周回顾
大家好,在慕客信研发的又一周过去了,第三周的硬件和装配工作逐渐进入了尾声,为了继续跟进第三周的内容,你们可以点击 创客侠战甲二代——第二周进行查看,我也会在这里简单进行概括,上一周我们主要完成的进度有:
- 运动传感器外壳设计完成并打印完毕
- wiiChuck接口标注完成
- 电位计外壳装配初步完成
- 航空头数量决定
- 两个惯导的航空头一侧焊接
- 右边电位计外壳打磨完成
- 整体测试完成
大家也可以看到,各个部分的测试已经完成得差不多了,小部分的零件也基本都焊接完成,因此第三周我们所做的主要工作就是进行装配和调整。

图1:整套战甲后视图
第三周进度跟进
- 腰部总处理器盒子的固定
我们的二代战甲因为取消了整套服装的穿戴,因此会将总处理器Arduino装在一个盒子中并固定在一根腰带上,下面就是我们的固定方式:

图2:处理器盒子的腰部固定(1)
首先是下部的固定,由于我们的设计想法是将盒子的下部完全固定,上部可以自由式打开和固定。因此下部的固定就采用四根扎带将腰带和盒子绑在一起,这样是一种十分保险但是有效的固定方式。

图3:处理器盒子的腰部固定(2)
由于合理中有我们的总处理器Arduino,考虑到如果测试出现什么问题或者需要更换某些接线的情况。因此盒子不能完成固定,于是上部就使用了魔术胶带的形式。使用的时候完全黏上固定,打开的时候将魔术贴打开即可
2. 总处理器盒子内的隔板设计
一个处理器的盒子中需要放上充电宝作为电源供电,也需要放上最重要的Arduino处理器。因此在原来的盒子中,这两样东西会碰到一起并互相滑动,这对于一个需要有大幅度动作的战甲来说并不是一个非常理想的情况。

图4:原本的处理器盒子内部
因此我们就想在盒子里加上一块隔板,可以将充电宝和Arduino分开,同时隔板的右面和右面可以使用热熔胶和盒子固定在一起,左边因为需要插入USB数据线,所以不设计平面。前部也有一个3mm的凸起,为了防止Arduino的向外滑动。

图5:隔板的初步设计
3. 隔板建模完成

图6:隔板在Fushion360中的第一次建模原型
4. 多加出两根wii手柄的航空头
原本我们的想法是将wii手柄直接接在Arduino上并放入盒子里,那时候主要是从减少焊接工作量的角度去考虑的。但是在最后组装之前,我们发现没有了航空头,首先是不太美观,和其他几条接线有区别,第二个问题就是如果直接接在Arduino中,当wii手柄的接线受到拉扯时,很容易导致里面的线松掉或者脱掉,影响稳定性。于是我们决定将wii手柄也接上航空头并固定在盒子上。
5. wii手柄航空头焊接完成

图7:wii手柄的航空头
6.隔板3D打印完成
7. 隔板修剪,打磨并固定完成
因为两个额外加出来的航空头和充电宝接线的缘故,我们不得不对打印完成的隔板进行修剪。(这里具体会在问题中讨论)

图8:修剪完成的隔板

图9:隔板在Fushion360中的第二次建模原型
于是我根据我们修剪完成的隔板,将其在Fusion360中又进行了一次建模,也方便之后制作成教程。
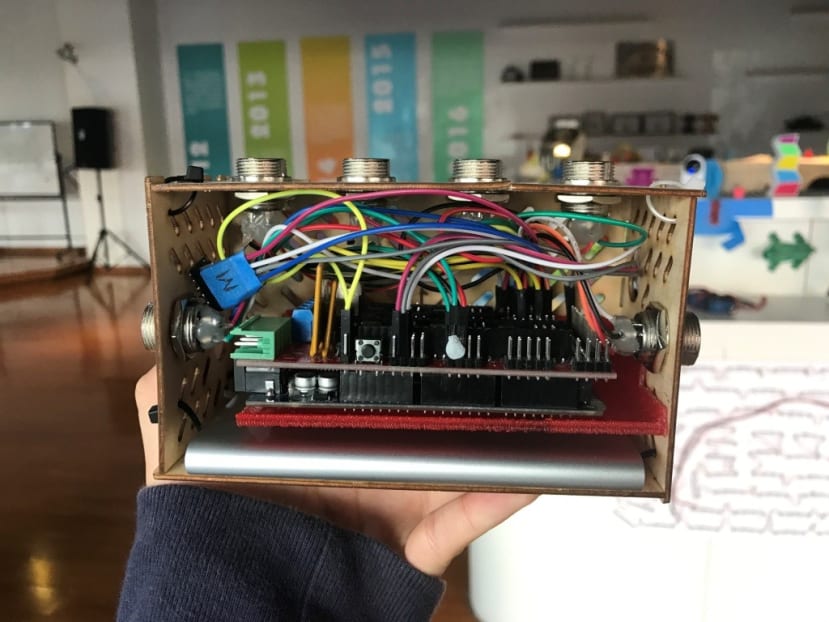
图10:隔板和所有原件固定在处理器盒子中
最后隔板也完成后,我们就可以将它,Arduino和充电宝都固定在盒子里了。这是最终完成的图片,可以看到变得整洁了许多,每个部分单独拿出来也不会受到影响,十分方便。
8. Arduino上所有航空头接线完成,unity可接收到数据

图11:最终战甲的后视图
可以看到这就是我们战甲最后的基本效果。左右两边手肘分别固定有一个电位计和一个运动传感器,由四根航空头连接到总处理器。Wii手柄在我手上,也是由航空头接过来。
所遇到的问题
- 隔板设计不当
前面我也提到了,起初在设计隔板时还没有考虑到wii的航空头。另外充电宝需要和Arduino用USB线连接,但是没有给足空间,这是我们考虑的不够全面。于是在打印完隔板后我们进行了一下修剪,好在由于设计比较简单,所以操作起来并不是很困难,但是需要注意的是在以后进行产品设计时,一定要充分考虑到可能发生或改变的事情,留出足够的修改空间。
2. 在最后unity测试中,右边电位计没有数据输出
在讲我们的战甲连接上unity中的机器人后,我们对每一个自由度都进行了检测,但是唯有右手手肘处不能转动,于是我们就猜测是电位计的接线或是这个电位计本身出了问题。之后我们就将处理器盒子打开,拿出Arduino进行线路的排查,后来麻烦的确是这个电位计的VCC和GND接反了,重新接线后一切就正常了,可以看到手肘的转动。
3. unity中的程序还需要调整
上面所说的,虽然可以看到两只手的八个自由度,但是很显然机器人的动作和我们的还是有着很大的不同的。比如手肘转动的角度比例不同,每条手臂初始的位置也有点误差。这就需要在之后的软件调试过程中再进行修改。这是我们下周主要需要攻克的难关。
好了,以上就是我们第三周的战甲进度,也算是快接近尾声了呢!看着一个产品从自己手中诞生的感觉还真的是很不错。下一周的任务主要就是unity的调试和理线工作,要让整体看起来更美观更简洁。另外就是需要把二代战甲的制作过程制作成教程,以方便大家参考,那我们下周再见啦!
该系列第二篇 创客侠战甲二代——第一周
第二篇 创客侠战甲二代——第二周
第四篇 创客侠战甲二代——第四周