
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
上周回顾
大家好,上周和大家介绍了我们第一周在慕客信公司进行共同设计研发创客侠战甲二代的一些进展,为了继续跟进第二周的内容,你们可以点击 创客侠战甲二代——第一周进行查看,我也将在这里简单进行概括,上一周我们主要完成的进度有:
- 原理图,电路图完成
- 电位计的外壳设计初稿完成
- wii手柄端口接线焊接完成
- 两个手柄测试完成
- 两个电位计测试完成
- 三个运动传感器测试并校准完成
- 蓝牙模块设置完成
- 电位计外壳二稿建模完成
总的来说,上一周的所完成的内容还是十分丰富的。同样的,第二周我们在战甲上的进展也很可观,下面就给大家进行以下介绍。

图1:创客侠战甲二代支架的大致外观
第二周进度跟进
- 运动传感器外壳设计完成并打印完毕
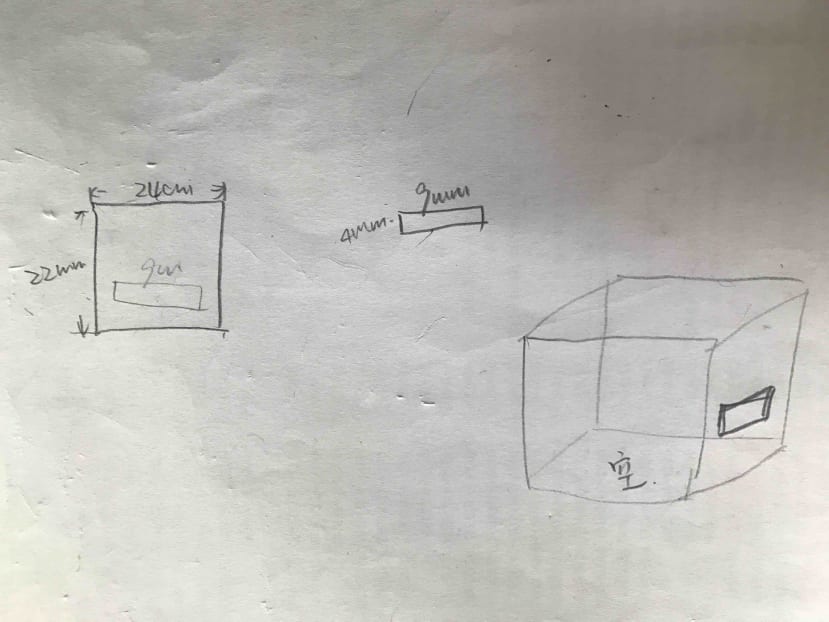
图2:传感器外壳设计手稿
这里我们的初步设计是打印一个方方正正地小盒子,可以直接粘附在电位计外壳之上,这样不但操作起来比较方便而且在美观度上也有所提高。但是有一个很重要的点就是运动传感器的接线需要固定在传感器外壳上,这样可以保证穿戴者的各种运动都不会拉扯到线,就不会出现断路及其线脱开的情况。因此, 我们在小盒子的一侧设计了一个小窗口,可以将线从其中穿入并固定在一侧。另外,为了避免在3D打印过程中出现支撑(3D打印过程中防止悬空部分掉落的多余的一些打印件)过多的烦恼(有一些构件无法避免会出现支撑),我们的设计是将一个正方体的两部分分开来打印,这样就可以很好地避免了这个问题。
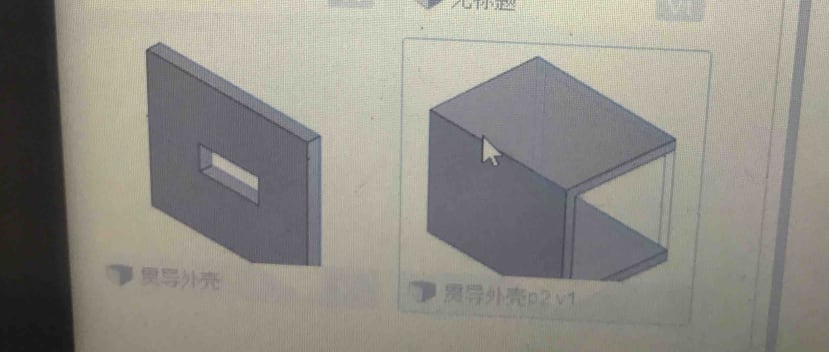
图3:传感器外壳建模
我们这里建模使用的是Fushion360,个人感觉它是一个比较适合初学者的建模软件,操作相对简单,视窗也比较明了。
2. wiiChuck接口标注完成
为了方便之后的查看,我们用绘图工具将wiiChuck的接口进行了标注。
3.电位计外壳装配初步完成
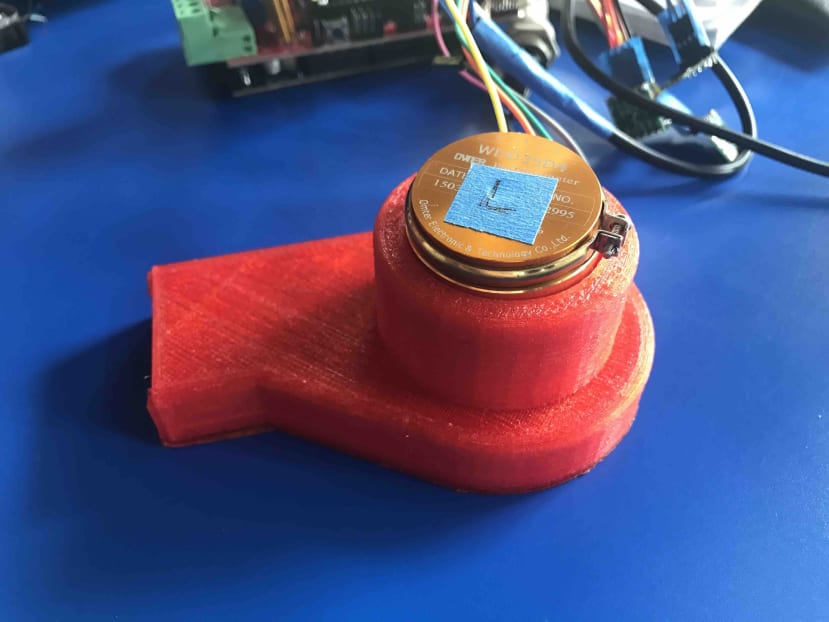
图5:左侧电位计的安装外观
左侧电位计外壳是最先打印的那个,在进行了一些对外壳上的支撑(之前介绍过)的修剪和打磨之后,就可以安在支架上了。我们将电位计外侧黏贴了一圈蓝胶(质地类似口香糖的胶)并牢固的安装在了外壳上。对于电位计和支架手肘处的螺丝,我们准备采用热熔胶的形式,在全部测试完成后进行固定。
4. 航空头数量决定
航空头可以帮助我们把需要的一股线整合在一起变成一整根,也是解决美观问题的一个好方法。由于每个航空头有四条接线,因此我们的想法是一共需要四个航空头,左右两侧各两个。两侧电位计(共三条线)共占据了两根,两侧的JY901运动传感器(共四条线)也占据了两根。至于第三路运动传感器,因为是背部的,所以可以直接放在处理器的盒子中。Wii 的两根手柄由于本身就有长线连接,所以我们也想直接连在mega2560的板子上。蓝牙模块因为比较小巧而且没有方位限制,因为也放在盒子中就可以了。
5. 两个惯导的航空头一侧焊接
在确定了航空头的数量之后,我们就需要对其进行焊接。航空头一共分两边,一边是所需要的原件的短线,另一边是连接的长线。我们这次先焊接短线部分。首先,由于所要焊接的长线有四种颜色,因为为了配对方便,我们将线的颜色和接口数字标注进行对应:RED-1, GREEN-2, YELLOW-3, BLUE-4。

图6:焊接完成的航空头一侧
6. 右边电位计外壳打磨完成
由于左右两侧的电位计是分两次打印的,而且支撑的结构和工艺也不太一样,因为在进行第二个电位计外壳打磨的时候,我们花费了比较长的时间。不过功夫不负有心人,最终还是打磨完成并可以安装在右侧支架上。
7. 整体测试完成


图8:整体测试所得到的数据
所遇到的问题
- 右侧电位计外壳支撑很坚固
之前也说到了,由于打印的工艺和方法不同,右侧电位计外壳的支撑打磨起来非常困难,基本找不到切入口。虽然这次在大家的共同努力之下还是基本打磨好了,但是我们决定在以后的设计中,如果是这种需要打支撑的物件,就尽量把尺寸做的大一点,宁可不够填补,也不要多了打磨。
2. 整体测试时,传感器数据出现问题。
一开始三个运动传感器的数据传输频率有点问题,所收集到的信号并不是以相同的频率出现在串口监视器上的。其实我们也不太清楚具体的原因是什么,但是后来通过对每个运动传感器再进行校准一遍,第二次得到的数据就好看很多了。
3.航空头长线部分很难焊接
在长线距离定好了之后,我们决定开始焊接长线与航空头的另一端。但是发现一开始很难焊接上(不吃锡),后来发现因为那一侧的航空头是铝合金表面会产生氧化膜,因此如果要进行焊接的话最好用东西进行一下轻微的打磨,之后就可以很好的焊接上了。
好了,以上就是第二周我们创客侠战甲二代机器人的进展啦!马上就要进入到最后的组装和unity的程序编写部分了,我会每周和大家跟进的!
该系列第一篇 创客侠战甲二代——第一周
第三篇 创客侠战甲二代——第三周
第四篇 创客侠战甲二代——第四周