Dotez votre robot des mêmes commandes de mobilité qu'un Mars Rover : quatrième partie
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
Mars Rover 2020 Crédit : NASA/JPL
Les robots à roues présentent de nombreuses formes : ils peuvent avoir 2, 3, 4, 6 ou 8 roues, une suspension ou non. Le type de terrain sur lequel le robot est amené à se déplacer détermine largement le choix. Est-ce un sol de dépôt lisse, bien formé, ou une surface martienne cahoteuse, imprévisible ?
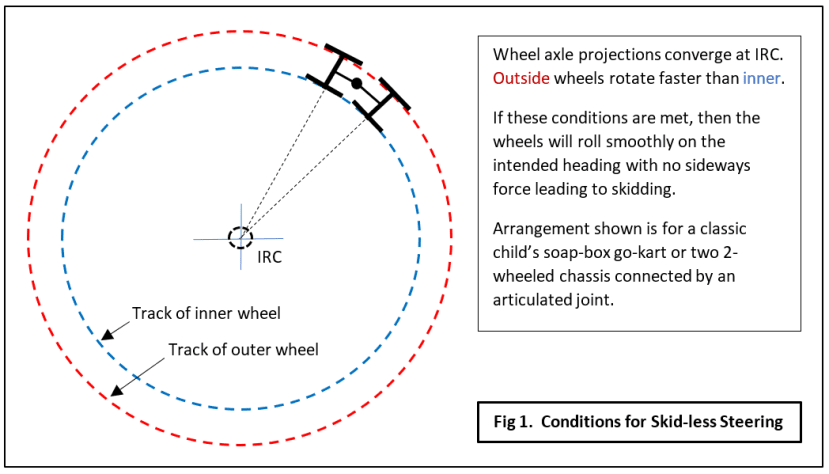
Les directions se classent en deux catégories principales : explicites ou différentielles. Chacune de ces catégories peut en plus être subdivisée en "direct" ou "à glissement". Le choix entre une direction directe et une direction à glissement est dicté par la tâche à effectuer par le robot. Les deux conviennent à tout type de terrain, mais si le mouvement doit être précis et mesuré de façon exacte, il faut prévoir un mécanisme de direction explicite, à l'exception de machines à 2 roues. Dans tous les cas, la conception doit présenter un centre instantané de rotation (CIR) unique. Tout véhicule d'exploration autonome ou semi-autonome qui nécessite un positionnement précis doit être élaboré de cette façon. Le concept CIR est vraiment facile à comprendre et peut être illustré graphiquement sans mathématiques complexes. La fig. 1 montre comment un chariot articulé simple à quatre roues peut être dirigé sans forces de glissement latérales.
Robots à 4 roues
La fig. 2 illustre trois autres versions d'un robot mobile simple à 4 roues : une peut être pilotée avec précision, une autre est moins précise, mais bien plus manœuvrable.
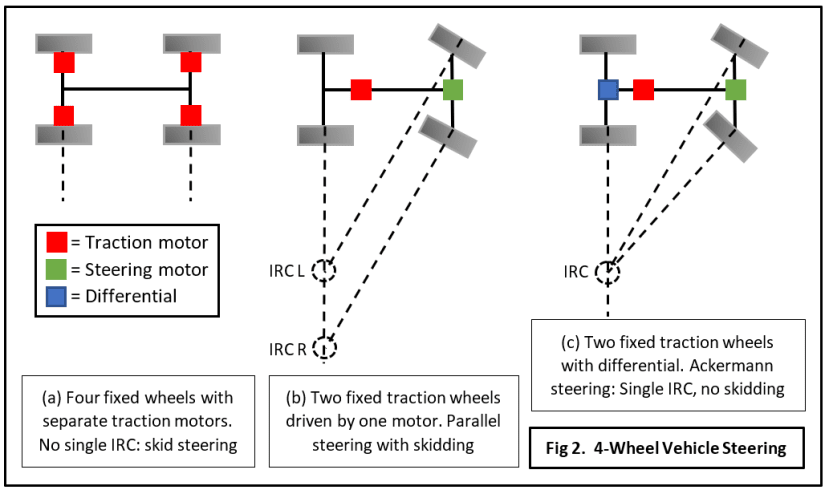
Configuration (a)
Roues fixes à moteurs indépendants. Dans ce cas, nous pouvons utiliser une direction différentielle. Cela signifie que les moteurs sur un côté tournent à une autre vitesse que ceux à l'intérieur. Cette approche remplit une exigence de la direction directe, mais pas la nécessité de faire tourner chaque roue avant dans la direction de la trajectoire suivie. Pour le formuler autrement, les roues continuent à rouler tout droit, mais la différence de vitesse les pousse vers le côté. Cette force latérale surmonte finalement la friction, et le véhicule glisse sur le nouveau cap. Ce type de direction, en général utilisé sur les véhicules à chenilles, est également désigné par "direction char".
Caractéristiques de la direction à glissement
- Permet des changements de direction très rapides, en exigeant une puissance additionnelle du moteur.
- Comme les roues sur chaque côté tournent dans des sens opposés, le véhicule peut pivoter sur place.
- Transmission intégrale adaptée à un terrain difficile.
- Conception simple sans liaisons mécaniques complexes.
- Rend l'odométrie par capteurs de rotation très imprécise.
- Peut conduire à une usure excessive des pneus.
Configuration (b)
Les roues avant tournent sous l'action d'un moteur de direction et sont maintenues parallèles entre elles. Les roues arrière tournent à la même vitesse, entraînées par un moteur de traction unique. Ce compromis reste sans doute assez simple et nécessite moins de moteurs, mais il présente tous les inconvénients de la configuration (a) sans les avantages. Les roues directrices parallèles impliquent deux CIR, qui forcent l'une ou les deux à glisser.
Configuration (c)
Les roues avant sont entraînées par un moteur de direction, mais avec un système de liaison Ackermann, qui assure l'alignement des roues pour un CIR unique. Dans ce cas aussi, les roues arrière sont entraînées par un moteur de traction unique, mais par l'intermédiaire d'une unité différentielle leur permettant de tourner à des vitesses différentes en fonction de l'impulsion de direction.
Caractéristiques d'une direction directe
- Élimination de toutes les forces de glissement latérales.
- Trajectoires précises et prévisibles.
- Odométrie exacte.
- Complexité mécanique.
- Le cercle de rotation minimum est plus grand que pour la direction à glissement.
- L'action différentielle peut causer une perte de direction totale si l'une des roues motrices quitte le sol ou n'y adhère plus.
6 à 8 roues
Les principes décrits ci-dessus peuvent s'appliquer à des véhicules à 6 ou 8 roues. S'il s'agit d'une direction à glissement, cette configuration implique juste des moteurs ou accouplements d'entraînement additionnels. Si, par contre, le véhicule est équipé d'une direction directe, les choses se compliquent dans la mesure où vous tenez à exécuter un modèle à moteur de traction unique : les véhicules à 6 ou 8 roues exigent en général que les 4 roues ou 6 roues avant soient motrices, et la présence de nombreux différentiels dans la chaîne cinématique augmente encore plus la complexité. Les camions militaires sont en principe construits de cette façon parce que les remèdes provisoires et réparations mécaniques sont plus faciles à opérer par un personnel non technique sur le terrain que les réparations de systèmes électroniques/électriques. En temps de guerre, ces véhicules peuvent être sacrifiés, et une fiabilité de longue durée n'est pas nécessaire. Les astromobiles doivent présenter une conception mécanique plus simple (plus légère) et être bien plus fiables (réparations impossibles).
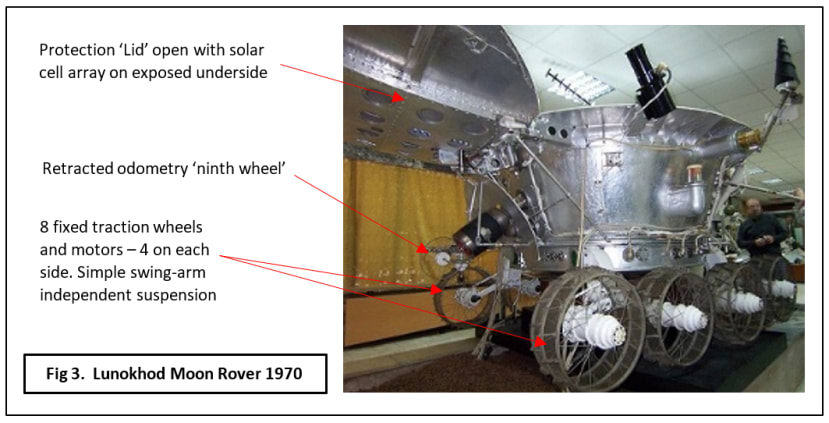
Les concepteurs de rovers sont confrontés à des restrictions de poids pour deux raisons : chaque gramme supplémentaire augmente les coûts de carburant de lancement, et une trop grande pression sur le sol pourrait produire un enfoncement des roues dans un terrain lunaire ou martien meuble et poussiéreux. Les structures légères et moins robustes peuvent réduire le premier problème, alors que des roues multiples, voire des chenilles, peuvent remédier au deuxième. Les chenilles sont en général exclues parce qu'une navigation précise est nécessaire et qu'une manœuvrabilité à haute vitesse ne l'est pas. Ceci dit, le tout premier robot d'exploration planétaire Lunokhod 1, qui a aluni en novembre 1970possédait 8 roues et une direction à glissement (fig.3). C'est vrai, on dirait qu'il est sorti d'un bain d'étain galvanisé. Néanmoins, il a fonctionné et s'est déplacé sur une dizaine de kilomètres. Lunokhod 2 a réussi à parcourir une quarantaine de kilomètres en seulement quatre mois.
Lunokhod et les Mars Rovers
Les rovers Lunokhod étaient munis de 8 roues fixes, chacune entraînée par un propre moteur électrique. Les moteurs sur chaque côté tournaient tous à la même vitesse, la direction à glissement étant assurée par la variation de vitesse entre les deux côtés. L'odométrie était fournie par une neuvième roue, une roulette non entraînée située à l'extrémité arrière. Cette configuration n'était vraiment pas satisfaisante, et il est apparu par la suite que la distance parcourue avait été sous-estimée.
On n'a plus réalisé d'autres rovers avant 1997, année où la mission Pathfinder de la NASA a fait atterrir le robot à 6 roues Sojourner sur Mars. Ce véhicule avait la taille d'un jouet : une longueur de 65 cm et une largeur de 48 cm. C'était un démonstrateur technologique pour la nouvelle génération d'astromobiles, capables de se déplacer et d'explorer. Puis, on a développé les plus grands rovers Spirit et Opportunity en 2004, suivis du robot à alimentation nucléaire Curiosity, en 2012, d'une taille encore plus étendue (fig.4). Le successeur de Curiosity atterrira a priori en 2020. Toutes ces astromobiles sont pourvues du même système de mobilité à 6 roues, basé sur une suspension de type bogie oscillant.
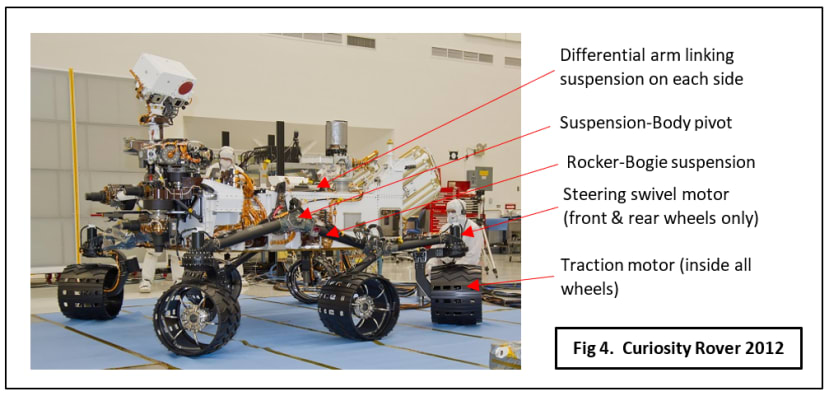
À noter que les quatre roues de "coin" sont utilisées pour le pilotage. Dans cette topologie de prélancement, le rover Curiosity est conçu pour effectuer une rotation sur place avec ses roues. Le système de mobilité de ce véhicule présente l'inconvénient que le contrôleur de moteur ne peut entraîner les moteurs de traction en même temps que la direction. Comme le rover doit s'arrêter chaque fois qu'un ajustement du cap est nécessaire, sa progression est lente. Au moment de la rédaction de cet article, Curiosity a tout juste parcouru une vingtaine de kilomètres depuis son atterrissage il y a six ans. À comparer avec la progression de la deuxième astromobile Lunokhod… Bien sûr, les objectifs des deux missions étaient différents : la science ne figurait pas au premier rang durant la guerre froide des années 1970. Ce qui comptait, c'était d'être le premier. L'Union soviétique n'a pas réussi à envoyer le premier homme sur la Lune, mais elle disposait de l'astromobile lunaire ayant parcouru la plus grande distance ! Curiosity (initialement appelé "Mars Science Laboratory") devait se déplacer avec précision, car la collecte de données scientifiques constituait la priorité absolue.
Cette section à 6 roues renferme aussi l'astromobile européenne ExoMars 2020, dont la photo se trouve dans la partie 2 de cette série. La disposition des roues semble similaire à celle des rovers de la NASA, mais il y a de grandes différences. Pour commencer, il n'y a pas de suspension de type bogie oscillant, seulement trois bogies à 2 roues, chacun muni d'un pivot au centre. Les quatre roues avant sont fixées à des bogies sur chaque côté ; le bogie des roues arrière comporte un pivot sur la partie arrière de l'astromobile et pivote ainsi perpendiculairement aux autres. Comme les autres rovers martiens, ce véhicule est doté de moteurs de traction sur les 6 roues. À la différence des autres, toutes les roues permettent des mouvements en crabe, et les "jambes" de suspension peuvent se balancer indépendamment en avant et en arrière en donnant ainsi au véhicule l'allure d'un marcheur. Le rover sera également en mesure d'entraîner tous les moteurs de traction et de direction en même temps. Ce document contient de nombreux autres détails sur les systèmes de mobilité conçus pour le rover ExoMars, qui devrait atterrir sur Mars en 2020.
Le plaisir du deux-roues
Je laisserai de côté les véhicules à 3 roues puisqu'ils ne sont pas adaptés à un terrain difficile, seulement au sol lisse d'un dépôt. On pourrait dire la même chose d'un robot comportant un châssis à 2 roues et une ou deux roulettes pour rester debout (voir la partie 2). La plupart des robots de formation, de loisirs et de recherche utilisent cette configuration parce qu'elle est facile à mettre en œuvre. Bien qu'elle soit basée sur une direction différentielle, elle se caractérise par un CIR unique, et un simple ajustement des vitesses relatives et du sens de rotation de ses deux roues permet de varier le mouvement entre une trajectoire rectiligne et une rotation sur place. C'est complètement inadapté à Mars, mais très bien pour la formation et la recherche.
Suspension
La plupart des petits robots mobiles commercialisés sont dépourvus de suspension. Celle-ci n'est pas nécessaire sur des sols lisses, mais qu'en est-il du "tout-terrain" ? Les voitures sont en général dotées d'un ressort et amortisseur à course réduite (mouvement vertical) sur chaque roue avec un réglage ferme pour les voitures de sport, qui permet une prise rapide des virages, et un réglage souple pour les routières, offrant un plus grand confort de conduite. Les véhicules tout-terrain ont une suspension à course longue, une assiette plus haute pour convenir aux terrains difficiles et une transmission intégrale. Une astromobile a également besoin de ces caractéristiques tout-terrain. La suspension indépendante à course réduite du rover Lunokhod ressemble plus à celle d'une voiture routière parce qu'elle a été conçue pour une télécommande en temps réel permettant d'éviter des obstacles, sans passer dessus. Comme je l'ai mentionné plus haut, ce véhicule a été conçu pour avancer rapidement sur une surface poussiéreuse meuble.
Les rovers destinés à l'exploration de Mars ont été construits pour un terrain dur parsemé de pierres et pour gravir des obstacles, non pour les contourner (fig.5). La raison principale tient au fait que ces mobiles doivent réaliser des objectifs en atteignant des points prédéterminés éloignés du lieu d'atterrissage. Le contournement, ne serait-ce que d'une petite pierre, pourrait rendre l'exécution de ces tâches impossible. Il a fallu concevoir un système de suspension capable de maintenir les six roues en contact avec le terrain dans toutes les conditions.

La suspension "bogie oscillant" permet au rover Curiosity de passer sur des obstacles plus hauts que le diamètre de roue. Il n'y a pas de ressorts, et l'ensemble sur chaque côté est suspendu par le corps sur un seul point pivot. Les côtés ne sont pas complètement indépendants l'un de l'autre, mais une barre horizontale à pivot central, reliant les deux bras différentiels, traverse la partie supérieure du corps. Cela empêche le corps de pivoter aléatoirement sur les deux pivots latéraux et transfère aussi le mouvement du bras oscillant d'un côté à l'autre. Lorsqu'une roue avant passe sur une pierre, le bras différentiel revient en arrière, fait tourner la barre, qui à son tour force l'élément oscillant à descendre de l'autre côté, en nivelant partiellement le corps et en augmentant la pression sur le sol de sa roue avant. Un point intéressant en relation avec cette conception est que l'on aurait obtenu une plus grande traction avec la configuration "bogie en premier lieu". Je ne sais pas si cela a été découvert fortuitement ou si c'était volontaire. Mais la configuration "oscillant en premier lieu" est intentionnelle. Si l'astromobile Curiosity est coincée sur une surface meuble, elle doit être capable de se libérer grâce à la plus grande traction disponible vers l'arrière. Ce document décrit le système de mobilité des rovers martiens similaires que sont Spirit et Opportunity.
Construisez votre propre rover
Les vrais robots deviennent des machines extrêmement complexes, au niveau mécanique et électronique, exigeant une programmation (codage) élaborée pour effectuer des tâches utiles. La plupart des robots mobiles de loisirs commerciaux tendent à présenter un châssis à 2 roues avec une roulette, ou à 4 roues, sans format de direction explicite. Aucun de ceux que je connais ne possède un système de suspension. Le type châssis est facile à réaliser et avantageux pour développer un logiciel de commande et essayer des systèmes de capteurs, de navigation et de communication. Si vous envisagez de mettre au point un vrai rover de type martien, un Curiosity miniature, NASA/JPL a développé un package design open source complet exigeant des composants d'une valeur de £ 2 000. Cela est cher pour un individu, mais idéal pour un établissement scolaire supérieur enseignant les matières STIM.
Enfin :
Les astromobiles sont conçues pour être robustes et fiables parce qu'elles fonctionnent par définition dans un environnement hostile, non documenté, sans possibilité de maintenance. Le rover martien Opportunity, qui a atterri en 2004, était toujours en service en juin 2018 et a collecté des données utiles jusqu'à cette date. Il s'est mis en mode hibernation (et nous espérons qu'il en sortira) lorsqu'une tempête de sable a sévi sur la planète (un événement assez fréquent), empêchant les rayons du soleil d'atteindre les panneaux solaires du véhicule. À ce moment, il avait établi un nouveau record de distance en parcourant quelque 45 kilomètres, plus que le rover Lunokhod. Curiosity, pour sa part, avec son alimentation nucléaire, continue sa route. Espérons qu'Opportunity se réveille bientôt.
Si vous avez des questions sur des aspects pratiques, suivez mes messages sur Twitter. Je mets des liens vers des articles intéressants sur l'électronique et les nouvelles technologies, je retweete des publications que j'ai repérées sur les robots, l'exploration spatiale et d'autres sujets.