Good Air Canary - Guide de construction
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
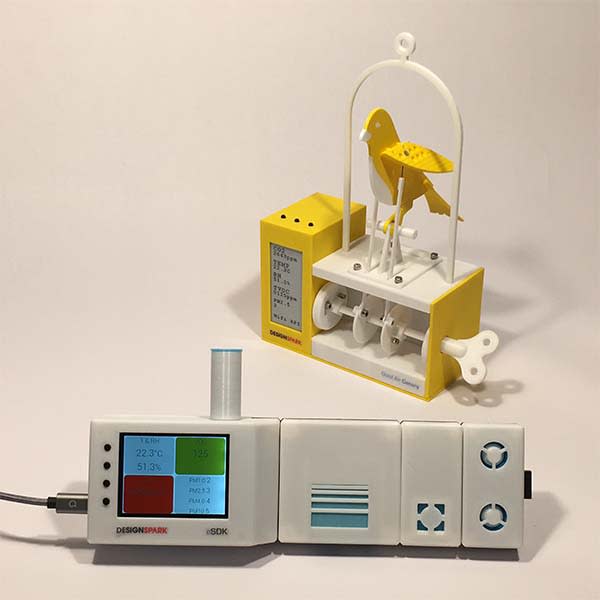
Le « Good Air Canary » s'anime à différents niveaux de la qualité de l'air (de bonne à médiocre à mauvaise à dangereuse), et vous pouvez même enregistrer un son où il se plaint qu'il faut ouvrir une fenêtre !
Le « Good Air Canary » est né de la phase de R&D du kit de qualité de l'air (ou kit de développement de capteurs environnementaux DesignSpark (ESDK), tel qu'on l'appelle). Parmi les nombreux autres faits relevés lors des entretiens avec les plus grands experts en matière de pollution et de capteurs industriels, le plus surprenant est qu'en travaillant dans mon atelier de 2 m de côté, je me rendais littéralement moi-même malade sur le plan respiratoire et cognitif. L'idée que je discutais tout le temps n'a bien sûr pas choqué ma femme, mes amis ou quiconque chez RS ayant travaillé avec moi... mais en parlant sérieusement, si vous travaillez chez vous dans un bureau de taille moyenne avec les portes et les fenêtres fermées pendant une heure ou deux, vous travaillerez presque certainement à un niveau que les experts en santé ne vous conseilleraient pas.
Des niveaux élevés de CO2 réduisent considérablement les performances cognitives. Figure tirée de Satish 2012.
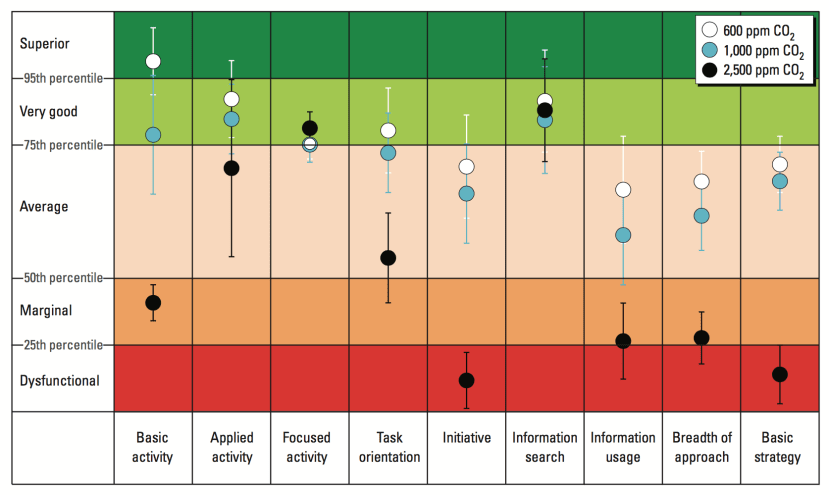
Des études menées à Harvard ont montré que vous êtes tout simplement « plus bête » si vous travaillez dans un environnement à forte teneur en CO2. (Autres liens). Alors, que veut dire « trop élevé » ? Le CO2 est mesuré en ppm (parties par million). Le CO2 de fond à l'extérieur est d'environ 500 ppm, et si à l'intérieur il atteint 1000 ppm, ce n'est pas bon - et pourtant je peux atteindre 4000 ppm dans mon atelier après seulement une heure à respirer normalement (peut-être plus vite si je suis sur un appel zoom en traitant un projet passionnant !). J'avais un moniteur de CO2 à l'allure « techno », mais toutes ces unités ppm semblent plutôt étranges à tous ceux qui n'ont pas de formation technique. D'où l'idée de créer un gadget amusant pour rendre l'information plus accessible.
La vieille histoire du « canari dans la mine » est assez bien connue, mais au cas où vous ne la connaîtriez pas, les mineurs de charbon utilisaient un canari comme « détecteur de gaz d'alerte précoce », car il tombait de son perchoir s'il était exposé à de petites quantités de gaz toxique. Les humains pouvaient alors s'enfuir rapidement, car ils pouvaient en supporter davantage - mais seulement un tout petit peu. Il était difficile de le détecter, car de nombreux gaz toxiques présents dans les mines sont insipides et inodores. En faisant des recherches approfondies, j'ai appris que quelqu'un avait fabriqué un « réanimateur » pour ramener le canari au bord de la mort.

Cage pour réanimer le canari, avec bouteille d'oxygène, fabriquée par Siebe Gorman & Co. Ltd, Londres (https://museumcrush.org/)
J'espère que ce canari IdO vous ramènera de l'état de « mort » ou de « zombie » que nous connaissons tous lorsque nous sommes dans une pièce étouffante, mais maintenant la science vous donne vraiment les données nécessaires pour insister auprès de votre patron sur le fait que vous devez sortir et faire une promenade - non seulement pour le bien de votre santé, mais aussi pour votre rendement créatif et professionnel. La science montre que vous ne pouvez tout simplement pas penser latéralement à 4000 ppm, alors pourquoi lutter contre cela - ouvrez quelques fenêtres et faites passer votre santé en premier pour un meilleur équilibre travail/santé.
Le guide de bricolage suivant vous montre non seulement comment construire un charmant pense-bête de bureau, mais sa fonctionnalité IdO peut être connectée à n'importe quel nombre de capteurs de sources de données externes. Le Canari pourrait vous avertir de la présence de pollens, de vents violents ou de feux de forêt - le choix vous appartient : Il vous avertit que vous devez prendre des mesures concernant votre environnement, que ce soit au niveau local ou même mondial.
Ce projet fonctionne avec le kit ESDK sur la qualité de l'air. Je suggère que si vous êtes novice en matière d'IdO, vous envisagiez de construire ça également, mais si vous avez de l'expérience dans ce domaine, vous pouvez bien sûr connecter le canari à toute autre source de données de votre choix. Amusez-vous bien dans les deux cas !
Pièces, outils et équipements.
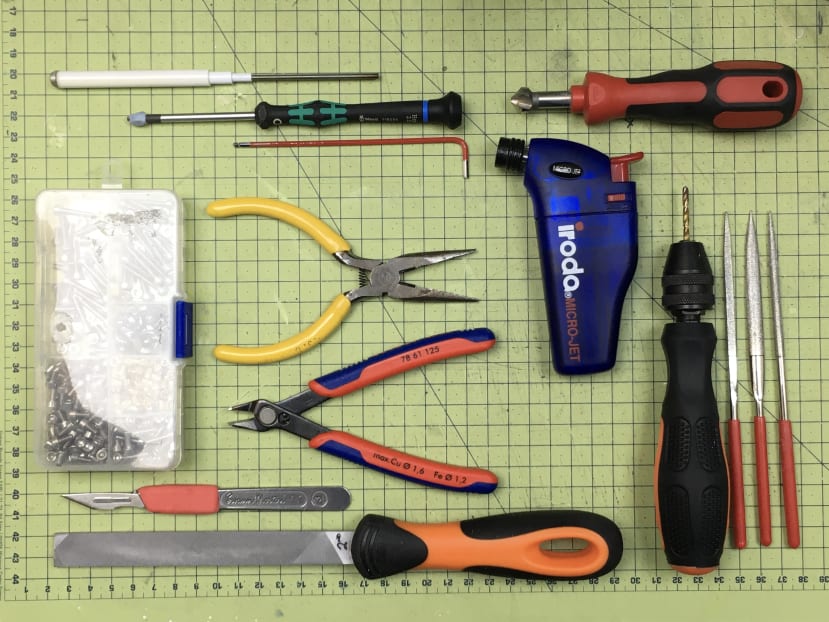
Les outils à main présentés ici sont plutôt basiques, et l'intention est que vous n'ayez pas besoin d'ateliers fantaisistes pour construire la structure du canari. En plus de cela, vous aurez besoin de faire un PCB de base, donc vous aurez besoin d'un fer à souder, et bien sûr d'une carte de prototypage de base ainsi que de quelques composants, mais rien ne nécessite un assemblage spécial de PCB (c'est-à-dire toutes les soudures à travers les trous).
Impression 3D :
- Imprimante 3D (ou possibilité d'imprimer des fichiers via le LIEN ci-dessous).
- Filament PLA blanc (832-0223) (+ 1 couleur alternative, par ex. jaune (832-0232)
- Buses d'imprimante de 0,6 mm, mais 0,4 mm convient également.
Fixations et raccords :
- Inserts en laiton - 1 paquet de 100 pièces (027-8534)
- Vis à tête hexagonale M3 x 6mm - 1 paquet de 50 pièces (028-0981)
- Vis CSK M3 x 6mm - 1 paquet de 50 pièces (304-4788)
- Aimants de 4 mm (dia) x 1 mm (épaisseur) (LIEN)
Composants électroniques :
- Servo 9g (215-3180)
- Écran Waveshare N/W eINK 2.9" (LIEN)
- Régulateur de tension linéaire 5V (168-6612)
- Diode 1N4001, 1A, 5V (628-8931)
- Condensateur céramique multicouche 330nF (801-5390)
- Condensateur céramique multicouche 100nF (538-1203)
- Adaptateur de courant continu (CC) 9V, 1A (121-7145)
- Prise d'alimentation CC (048-7832)
- 3x Boutons Momentanés 4,9mm (479-1485)
- Interrupteur à bascule (734-7066)
- Enceinte 3W (LIEN1)(LIEN2)
SBC/Cartes :
- Arduino Nano 33 IdO (192-7589)
- PWM/Servo Driver Adafruit 16 canaux 12-bit (LIEN)
- Carte son Adafruit Audio FX + Ampli 2x2W (LIEN)
- Carte prototype double face 70x90mm (LIEN)
- Carte de prototypage double face 20x44mm (probablement dans le cadre d'un ensemble/stock des produits ci-dessus)
Consommables :
- Fil pour le câblage du PCB.
- SuperGlue (un tube de 3g sera suffisant).
- Sellotape / Ruban de masquage.
- Bâtonnets à cocktail.
- Papier de verre (suggéré 400, 600, 1000 grit)
Outils génériques :
- Fer à souder, Soder, etc.
- Mini limes à main - plates, rondes, carrées (pour limer le métal et le plastique).
- Mini chalumeau (ou fer à souder) - pour insérer les inserts en laiton.
- Clé hexagonale de 2,5 mm / tournevis (pour les vis).
- Scalpel / Couteau de bricolage.
- Pieds à coulisse.
- Pistolet à colle thermofusible.
- Perceuse/perceuse à main avec mèches de 1,5 mm, 3,0 mm, 3,5 mm et 4,0 mm.
GitHub / Logiciel : Lien
Section 1 : Guide de préparation
Partie 1 : Téléchargez les fichiers 3D pour l'impression. Voir pièce jointe ESDK 3DP
Si vous ouvrez les fichiers Solid Works, vous verrez l'assemblage ci-dessus « GA » (General Assembly), si vous ne l'avez pas, vous avez toujours toutes les pièces STL individuelles pour l'impression.
Les fichiers peuvent être trouvés sur le LIEN, et ce sont des STLs gratuits.
Partie 2 : STL d'impression 3D.

Ce sont les dispositions des plaques de construction sur mon Ender 3. La taille du plateau est de 235 x 235mm, donc bien que vous puissiez y mettre beaucoup de choses, je ne le ferais que si vous êtes très confiant dans les réglages de votre imprimante. Si vous êtes novice en la matière, imprimez un peu à la fois.
Vous remarquerez que la plupart des pièces ont une surface plate « évidente », destinée à être posée sur le « lit » de l'imprimante 3D. La plupart des pièces ont été conçues pour ne pas nécessiter de support de construction, à l'exception de la « double griffe » (pied du canari) qui n'a pas de côté plat et qui nécessite donc un support de construction.
Vous n'êtes pas obligé d'imprimer dans les deux couleurs comme indiqué - et à bien des égards, je suis impatient de voir les variations que les gens vont créer !
Partie 3 : Chalumeau / Finition.
Cette partie est facultative, et ne doit être réalisée que si vous vous sentez à l'aise avec un mini chalumeau. Si vous vous attardez, vous risquez de vous brûler (et de brûler la pièce). Soyez averti. L'objectif est d'enlever les fils (morceaux de PLA en forme de toile d'araignée laissés après l'impression), et avec de la pratique, c'est facile et rapide à faire.
Partie 4 : Finition des pièces imprimées en 3D.
Comme pour la décoration d'une maison, une bonne préparation prend souvent autant de temps que la peinture elle-même, mais les résultats sont toujours meilleurs et durent plus longtemps. Un bon travail de préparation sera payant plus tard, c'est pourquoi je vous recommande de mettre un film ou de la musique et de prendre votre temps pour réaliser ces étapes à un rythme tranquille. Le reste de la construction se déroulera ensuite à un rythme rapide.
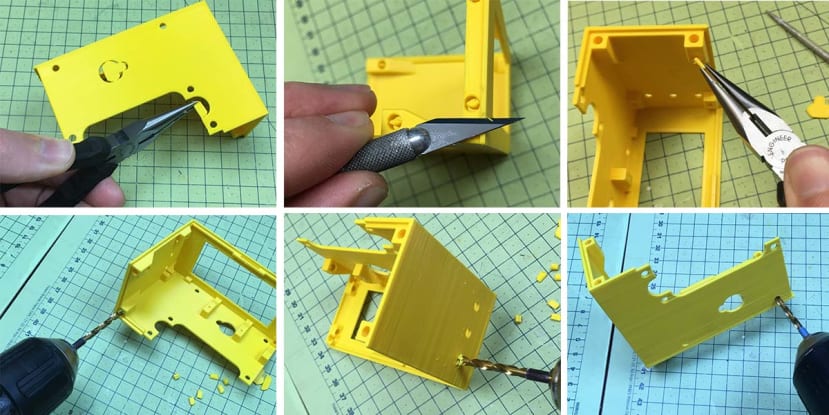
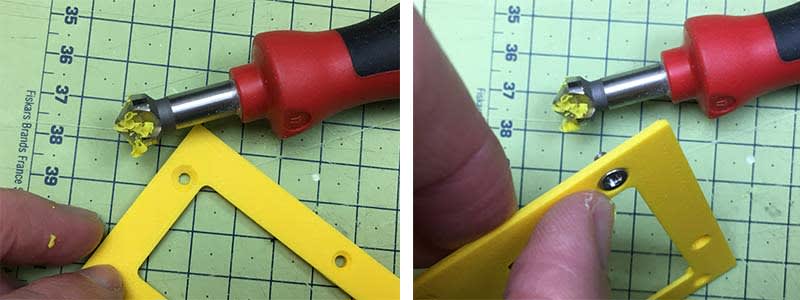
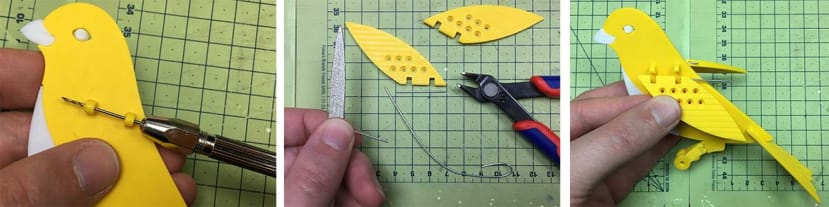
Utilisez la perceuse, le couteau et les pinces comme indiqué pour retirer tout support de construction, les bords rugueux, et de nettoyer les petites imperfections cosmétiques de construction qui se produisent souvent avec de nombreuses impressions, même si elles sont optimisées.
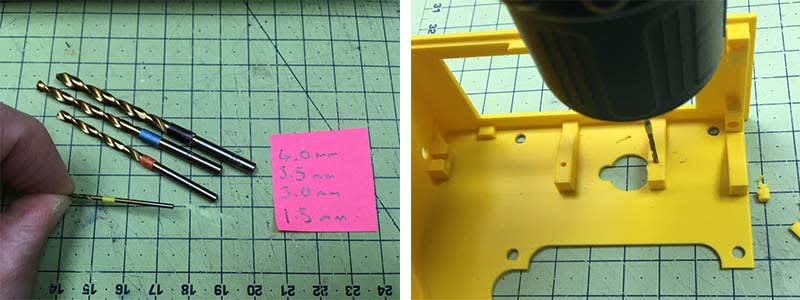
Remarque : J'ai donné un code couleur aux forets pour vous aider, mais aussi pour m'aider à ne pas confondre accidentellement une taille avec une autre. C'est facile à faire, et il faut faire attention à « embellir » simplement les trous (c'est-à-dire les rendre joliment circulaires en enlevant seulement un peu de matière - à ne pas les « percer » et les rendre plus grands).
Les trous du servo sont la seule exception où le trou devra être « percé » ou agrandi avec une mèche de 1,5 mm, afin que les vis du servo s'adaptent parfaitement. C'est la seule partie de la construction qui utilise des vis « autotaraudeuses » comme celle-ci, car elles sont fournies avec le servo dans la plupart des cas.
Si cela vous intéresse, la raison pour laquelle il ne suffit pas de faire les trous du premier coup est que les trous produits par l'impression 3D sont toujours assez irréguliers, et pas si forts/précis. Il est donc préférable de concevoir des trous un peu plus petits (par exemple, les trous qui passent les vis font 3,2 mm en CAO, mais finissent par faire environ 2,8 mm dans les impressions brutes, et il est donc nécessaire de les agrandir à 3,0 mm). J'ai appris cela lorsque je travaillais chez Dyson, et c'est une bonne compétence à acquérir, car vos pièces ne se fendront pas si la force de la vis ou du fil qui écarte les couches imprimées est trop importante.
Les images ci-dessus montrent certaines des pièces et la façon dont elles ont été préparées, mais l'approche générale peut être appliquée à toutes les pièces - y compris bien sûr les pièces en PLA blanc.
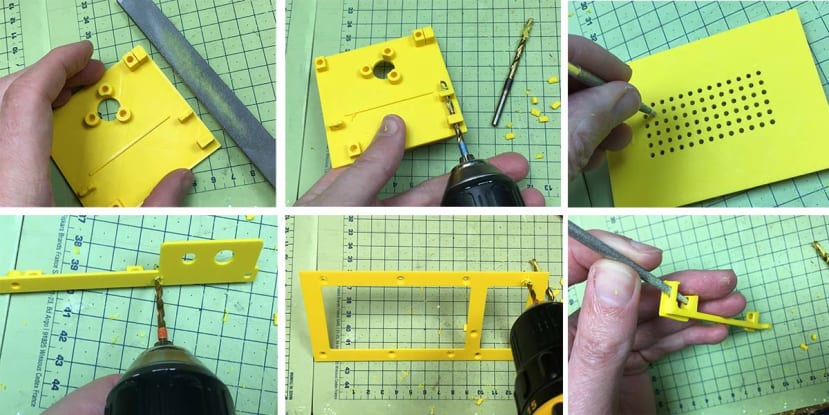
La plaque de base bénéficie de l'utilisation d'un outil de fraisage manuel pour « lisser » et agrandir les trous. Si vous n'en avez pas (bien qu'il s'agisse d'un outil courant dans la plupart des kits de forets des magasins de bricolage), vous pouvez le faire en utilisant un foret plus grand (par exemple 8 mm), et bien que l'angle soit plus faible, l'effet global d'assurer que les vis s'adaptent correctement peut être atteint. Faites attention à faire cela avec la pièce à plat sur une table pour éviter de glisser - les mèches sont encore pointues et la pièce peut se casser.
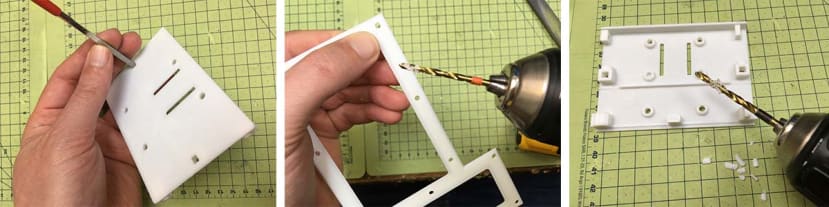
Les pièces en PLA blanc devraient maintenant sembler assez simples. Si vous n'êtes pas sûr de savoir quel trou correspond à quoi, commencez par un petit trou et n'agrandissez que si vous en êtes sûr. Il deviendra plus évident lorsque vous commencerez à ajouter des inserts en laiton de savoir quels sont les plus grands trous de 4,0 mm, donc en cas de doute, attendez quelques étapes.

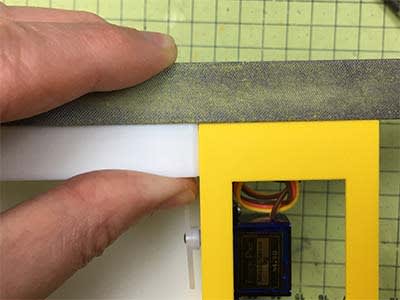
Shadow Gaps (Zones d'ombre) - il s'agit d'une caractéristique que l'on retrouve sur tous les produits qui ne sont pas fabriqués par Apple (qui utilise le tolérancement statistique pour assembler chaque pièce à une pièce correspondante par sa taille exacte). La plupart des pièces traditionnellement tolérées doivent assumer un certain degré d'imperfection, et les concepteurs/ingénieurs ont donc réalisé qu'en mettant l'accent sur « l'écart », cela rendait le produit « plus agréable à la vue ». Si vous regardez de nombreux produits en plastique, vous verrez un « écart » délibéré - cela semble plus agréable à l'œil que si l'on avait essayé de le faire affleurer et qu'on avait échoué. Nous faisons donc la même chose ici, car il est évident que l'impression 3D est beaucoup moins précise que le moulage par injection !
Quoi qu'il en soit, même si votre imprimante fait un bon travail, il se peut que vous devrez « nettoyer » l'espace en forme de « L », en utilisant une lime fine comme indiqué. L'astuce consiste à commencer par une pression légère mais ferme, puis à passer à des mouvements plus longs mais plus doux. Si vous n'êtes pas sûr de vous, exercez-vous d'abord sur un morceau de plastique.
L'image finale montre un gros plan de la façon dont le plastique s'assemblera et l'idée est que tout léger écart est moins gênant pour l'œil grâce à cette « astuce du métier ». Essayez-la sur vos modèles !
Partie 5 : Inserts en laiton fileté - technique d'insertion.
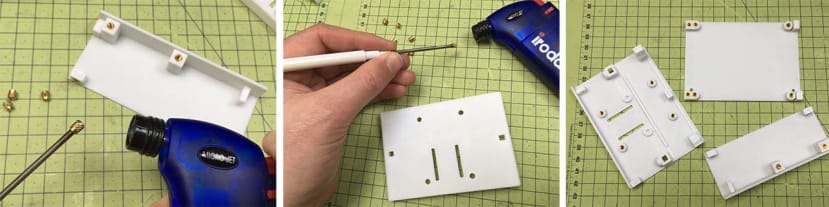
J'ai documenté plus en détail la façon d'insérer les inserts filetés dans le PLA dans les tutoriels précédents, et pour le kit ESDK, alors n'hésitez pas à les consulter si vous avez besoin de plus de conseils.
On pourrait penser que j'ai des actions dans les inserts filetés, ou que je suis commissionné par RS - mais ce n'est [malheureusement] pas le cas. Mais depuis que j'ai appris cette technique chez Dyson, je ne travaille plus sans elle. Même si ce produit aurait pu être conçu pour fonctionner avec des vis « autotaraudeuses » à usage unique, ou si j'avais pu imprimer des pièces plus complexes - en consolidant plusieurs pièces en une seule... mais je pense personnellement que cela ne correspond pas à l'esprit de l'Open Source - et de permettre aux gens de changer une seule pièce (sans réimprimer l'ensemble du projet). Il est peu probable, mais pas impossible, que vous repériez une petite erreur dans ce projet, auquel cas vous et moi n'aurons besoin que de mettre à jour une seule pièce. Et c'est bien sûr la raison pour laquelle j'essaie d'éviter la colle, car il est presque impossible de défaire les choses.

Il en va de même pour les pièces jaunes. Vous pouvez noter - j'utilise une longue barre filetée - c'est une poignée faite maison d'un tube en plastique sur une tige filetée M3. La raison en est en partie la précision, mais aussi la conduction de la chaleur qui prend plus de temps pour atteindre mes doigts ! Si vous n'avez pas cela, utilisez simplement une tige filetée M3 avec autant de longueur que possible.
Et vous en avez fini avec la préparation ! Maintenant la partie amusante peut commencer...
.....................................................................................................................................................
Bien joué, il ne vous reste plus qu'à passer à l'article de Pete Milne sur la construction du contrôleur.
On se revoit bientôt ici.
.....................................................................................................................................................
Section 2 : Construire le circuit
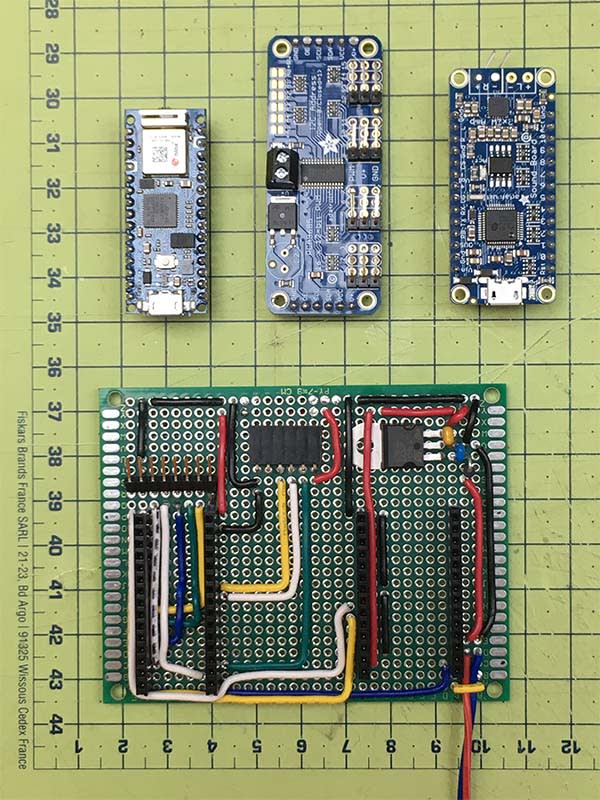
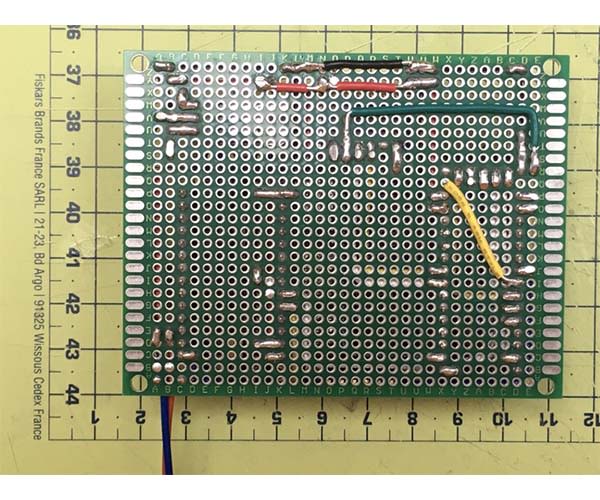
Je n'ai pas fait un « pas à pas » sur la façon de souder les fils, mais j'ai plutôt montré le résultat final que j'ai obtenu en suivant le schéma du circuit. Il n'y a pas une seule façon d'assembler votre PCB, mais j'ai trouvé que travailler sur le positionnement des connecteurs était essentiel - c'est-à-dire faire de la place pour que les fils de l'écran eINK s'insèrent facilement, etc.
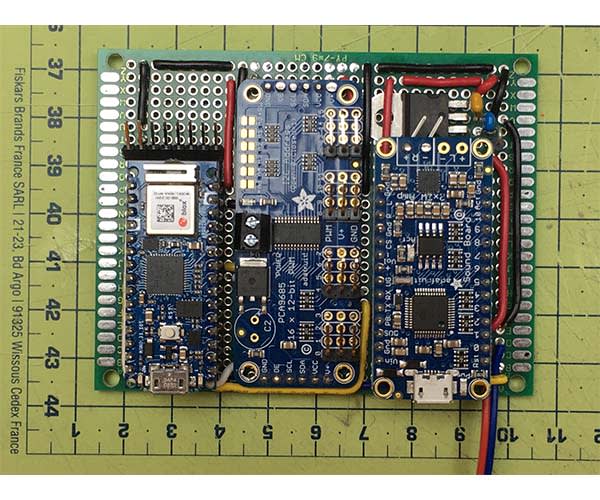
Vous pouvez bien sûr souder les Mini PCB (Arduino, etc.) directement et éviter d'utiliser les broches d'en-tête, mais je trouve que cela peut être un problème si vous faites des erreurs.
Enfin, une petite bizarrerie que j'ai faite avec la Carte Servo était d'utiliser des broches d'en-tête à angle droit *sous* le PCB, et ensuite de les « insérer » dans les prises d'en-tête femelles. Mais étant donné qu'il n'y a que 6 broches, je vous suggère de les souder directement sur le PCB vert pour plus de simplicité.
La préparation de la partie 3D étant terminée, vous pouvez maintenant commencer à fixer les composants électroniques ! Je vous suggère de lire d'abord cette section, car certaines parties de l'assemblage dépendent d'une certaine séquence d'assemblage (par exemple, vous devez assembler les pièces blanches de l'écran avant d'installer l'écran).
Section 3 - Guide d'assemblage
Partie 1 : Installation du servomoteur, des boutons, de l'écran et de l'enceinte.
Il s'agit probablement de l'une des parties les plus compactes du projet, donc si cela vous semble un peu difficile, rassurez-vous, c'est en grande partie « hypersimple » après cela !
La raison pour laquelle cette partie est si compacte est qu'elle définit plutôt les autres dimensions de la construction - s'il y avait beaucoup plus de « cadre » ou de lunette autour de l'écran, les autres parties devraient être plus grandes aussi, comme la partie jaune est la moitié de la largeur de la partie blanche, etc.).
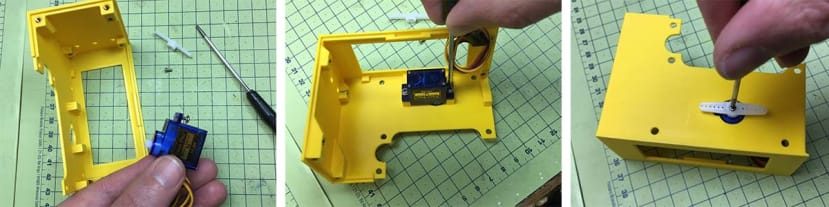
La plupart des servos sont vendus avec les vis et les « cornes » incluses. J'ai utilisé un générique « 9g » comme ils sont souvent listés, mais le conseil clé est de faire attention en vissant ensemble la dernière vis dans la corne, car il est facile de la mettre de travers et cela va perturber votre opération.
Installez le PCB avec une seule vis comme indiqué, (nous ajouterons la deuxième vis plus tard). Comme cette pièce est « DIY » (découpée par vous), sachez que vous devrez peut-être la limer pour l'ajuster. Cela vaut la peine de le faire maintenant (pour que les boutons s'enfoncent en douceur), plutôt que de devoir revenir en arrière et de l'ajuster plus tard.
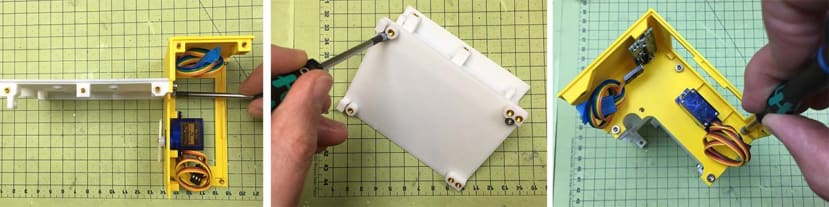
Il est important d'installer ces vis avant de monter l'écran ! Assemblez d'abord la plaque supérieure (comme indiqué dans la préparation - vérifiez que l'espace d'ombre s'adapte bien entre les deux parties. Limez pour ajuster si ce n'est pas le cas). Pré-assemblez ensuite la plaque arrière et la tablette inférieure, puis fixez-les comme indiqué avec les deux vis près de l'emplacement de l'écran.
L'étape se résume à votre degré de perfectionnisme. Les pièces s'assemblent avec une assez bonne tolérance, mais si vous voulez que tout soit parfait, je vous suggère de limer légèrement toute différence entre la base des deux pièces.

Faites glisser l'écran en position, comme indiqué. Posez-le sur le support de l'écran, et vissez-le dans le même bossage qui maintient le PCB en place. (Encore une fois, vérifiez que les boutons fonctionnent bien). J'ai montré la paroi du haut-parleur en place ici - juste pour vous montrer comment les vis vont, (avec le haut-parleur hors du chemin pour plus de clarté), mais bien sûr, l'installer avec le haut-parleur comme indiqué.
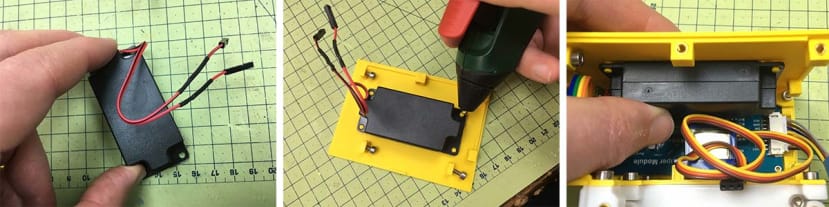
Il est recommandé de raccourcir la longueur des fils de l'enceinte, car cela réduit la résistance et donne un meilleur son. Faites-le comme indiqué, avec une longueur d'environ 15 cm. Bien que j'aie trouvé que mon enceinte s'adapte par friction aux goujons, si vous le souhaitez, vous pouvez ajouter un tout petit peu de colle chaude pour la maintenir en place. (Dans l'industrie, on utilise souvent ce qu'on appelle un « pieu chauffant », qui fait fondre les goujons jaunes en saillie sur l'enceinte, comme un rivet, mais bien que vous puissiez le faire, c'est un peu permanent à mon goût).
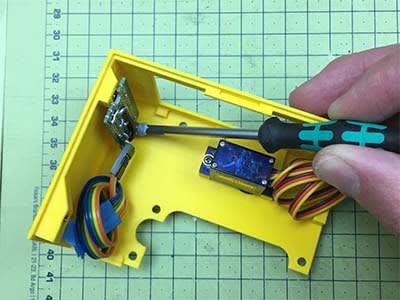
Partie 2 : Installation du PCB.
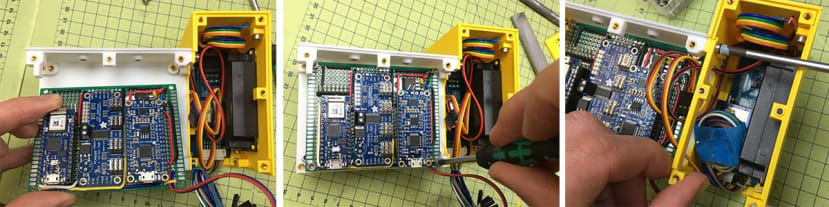
Installez la « carte mère » (PCB) comme indiqué. Ne serrez pas trop le circuit imprimé en place. Vissez le dispositif de retenue des câbles comme indiqué (dévissez les vis, puis remettez-les en place).
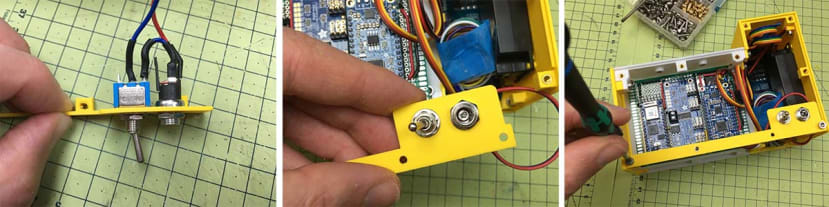
Câblez votre interrupteur et votre prise comme indiqué.

Ajoutez la paroi droite jaune comme indiqué. Il y a une vis très serrée (image du milieu) qui nécessite une manœuvre délicate de la clé hexagonale pour la mettre en place. En toute sincérité, l'assemblage s'en sortira sans elle, mais cela peut être fait avec de la patience.

Branchez le câble du servo comme indiqué. Veillez à respecter l'orientation. De même, prêtez une attention particulière aux fils de l'écran eINK. Fixez les câbles des enceintes comme indiqué.
Partie 3 : Les roues de l'automate
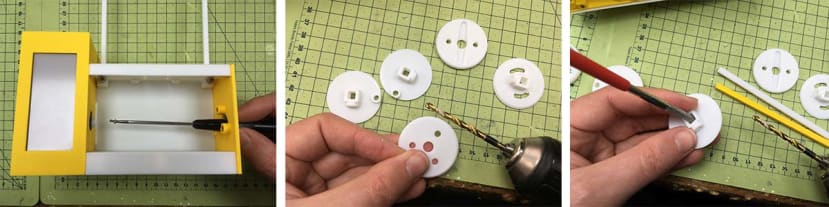
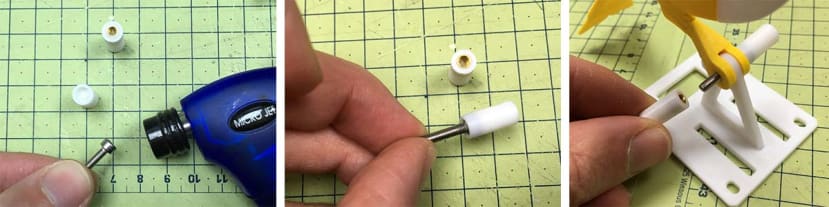
Dévissez la corne du servo. Percez / limez les disques pour les adapter.

Prenez la corne et appuyez fermement dans le boîtier. Il se peut que vous deviez limer le trou - mais il a été conçu pour être bien ajusté, pas trop large, car cela permet de le centrer. Ajoutez les inserts en laiton si vous ne l'avez pas encore fait.

Il s'agit d'une pièce utile car elle vous permet de régler avec précision l'angle des roues sans avoir à tout démonter. Visez à fond jusqu’à le bloquer dans un sens, puis installez la totalité du servo dans le sens de sa rotation. Revissez la vis à corne dans le servo comme indiqué.

Installez le disque d'étalonnage à 3 trous comme indiqué. Glissez dans l'axe - et vissez en place.
C'est assez difficile à expliquer avec des mots, mais l'intérêt de cet étalonnage est de pouvoir se déplacer dans les directions verticale et horizontale - ceci afin d'éliminer toute erreur de construction/impression 3D sur la longueur de l'axe, et ainsi obtenir un axe parfaitement droit du côté du servo à l'autre côté. Cela deviendra plus évident quand vous commencerez à voir les ailes du canari bouger, mais je vais être honnête, c'est plus pour les Nerds de l'ingénierie d'obtenir « exactement comme cela » et je suis sûr que le canari fonctionnera très bien sans cela ! Mais si vous avez lu jusqu'ici, vous êtes probablement cette personne - alors profitez de l'étalonnage !
Partie 4 : Le Canari.
Comme vous l'avez peut-être compris en arrivant aussi loin dans la construction (et si vous avez vu le RadioGlobe) - j'ai la manie de vouloir cacher toutes les vis autant que possible - à l'exception des vis « réglables par l'utilisateur ». Comme toutes les imprimantes 3D sont légèrement différentes, et compte tenu des différences de compétences humaines en matière de construction, le canari et le mécanisme de l'automate sont exactement le genre de choses que vous aurez besoin de modifier et de faire fonctionner « comme il faut ». Pour ceux d'entre vous qui ne cherchent pas à réaliser un projet de type puzzle ou « peinture par numéros », c'est là que ça devient amusant : Chacun de ces éléments vous permet de modifier l'esthétique (vous pouvez changer les ailes, imprimer des couleurs, ajuster les mouvements dans le code) et de donner au projet votre propre touche. Vous pourrez peut-être même ajouter une création d'automate totalement différente à l'unité de base de l'IdO.
Considérez donc les étapes suivantes comme « par défaut » et faites-en votre propre expérience.

Percez le trou central du pied canari et retirez soigneusement le support de construction. Enfin, insérez l'insert en laiton comme indiqué.
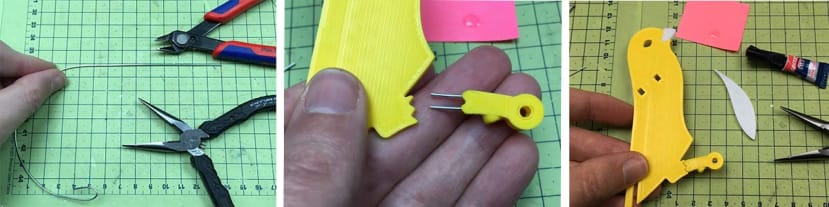
Prenez du fil d'acier inoxydable de 1,0 mm (ou du fil pour trombones), redressez-le et coupez deux petites longueurs d'environ 30 mm, puis collez un côté dans chaque trou comme indiqué. Si vous devez nettoyer les trous à l'aide d'une mèche de 1,0 mm (illustrée dans un étau à broches), je vous recommande de le faire, car cela vous permettra de l'installer avec moins d'efforts. Une fois que tout est en place, vous pouvez couper les fils et les insérer dans le corps du Canari.

Après avoir ajouté les pieds, vous pouvez maintenant ajouter le bec, la poitrine et les yeux, comme indiqué. Je suggère fortement de vérifier l'ajustement d'abord, et d'utiliser un scalpel et une lime pour obtenir l'ajustement parfait, car ce sont certaines des parties les plus visibles de la construction - donc ça vaut la peine qu’elles soient bien faites.

Les pings des ailes de 13mm sont délibérément serrés dans le corps du canari. Ceci est dû au fait qu'ils sont enclins à faire des efforts s'ils sont libres de bouger. Appuyez fermement dessus (contre une surface/objet propre), et utilisez l'arrière d'un pied à coulisse pour vérifier qu'ils dépassent de la même distance aux 4 points. Une fois que vous avez obtenu ce résultat, fixez-les en utilisant une quantité minimale de Super Glue.
A l'aide d'une mèche de 1,0 mm, percez les trous comme indiqué, et faites en sorte que les trous soient un peu plus grands que la mèche, afin que tout se passe bien. Ensuite (comme pour les pieds) mais 2 sections de 30 mm de fil droit. Si le fil n'est pas droit, utilisez une paire de pinces pour vous assurer qu'il est aussi droit que possible. Limez les extrémités, et insérez-les comme indiqué.

Limez tous les défauts dans les plus petits des 7 trous de l'aile. Insérez un des aimants de 4mm (dia) x 1mm (épaisseur) dans le niveau supérieur du trou indiqué. *Retournez* ensuite la pile d'aimants (pour inverser la polarité) et insérez le deuxième aimant à l'endroit correspondant. (Les ailes devraient maintenant « s'attirer » l'une l'autre.

Les aimants doivent rester en place même avec une certaine friction (c'est-à-dire un ajustement serré)... si ce n'est pas le cas, ajoutez un tout petit peu de colle chaude comme indiqué. (La colle chaude vous permet toujours de déplacer les aimants si vous le souhaitez plus tard). Faites attention à ne pas vous brûler, mais un conseil de pro est d'utiliser la salive sur votre doigt pour appuyer sur le bourrelet de colle afin d'aplanir et de remplir les espaces. Ne faites pas cela avec de grandes quantités de colle, car cela ne fonctionne que si la masse thermique de la colle est minuscule par rapport à la salive sur votre doigt. (Ou portez des gants de laboratoire si vous avez la peau sensible, ou si vous êtes soucieux).
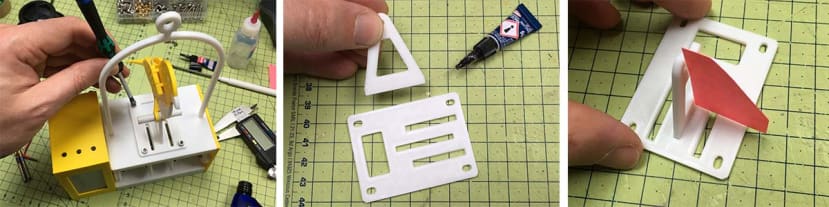
Pour créer le support, collez-le comme indiqué, en veillant à ce que le « repose-pied » en saillie soit tourné vers l'arrière. Utilisez du papier (ou une équerre) pour vérifier qu'il est bien perpendiculaire, sinon votre canari ne pourra pas se percher droit !
Pour fabriquer le « perchoir » (qui est essentiellement faux, mais qui permet au canari d'avoir un axe de rotation pour pivoter), chauffez la tête d'un boulon hexagonal M3x16 - et insérez-le comme indiqué. Ajoutez l'insert en laiton à la perche correspondante avec le plus petit trou. Ces éléments devraient ensuite être enfilés dans l'assemblage. Si le mouvement est collant, limez, et ajoutez un tout petit peu de mine de crayon à l'intérieur (le graphite est un lubrifiant), et si c'est trop mou, ajoutez une fine couche de Super Glue - laissez sécher - puis limez à nouveau pour obtenir un ajustement serré, qui bouge encore librement.
Partie 5 : Connexion du canari à l'unité de base.

Percez les trous dans les bras comme indiqué - avec une mèche de 3,0 mm. Faites-le très lentement et avec une pression minimale pour ne pas les briser. En cas de doute, utilisez la lime circulaire. Insérez un fil de 1,0 mm (ou un trombone) comme indiqué et coupez jusqu'à ce que 15-16 mm dépassent de l'extrémité du matériau imprimé en 3D. Il est préférable d'avoir une longueur trop importante et de la retailler, plutôt qu'une longueur trop petite.

Vissez le bras en place comme indiqué - en lui permettant de bouger librement. L'insert en laiton devrait probablement maintenir le boulon en place, mais s'il est trop lâche, ajoutez un peu de ruban PTFE, de colle chaude ou de frein filet si vous le souhaitez, afin de le maintenir en place. Ensuite, insérez l'extrémité du fil dans le trou situé sous l'aimant. Lorsque vous faites tourner les roues ci-dessous (manuellement à l'aide de la clé ou en utilisant le code), elles doivent basculer vers l'avant puis tomber du perchoir, car les bras se libèrent de l'emprise de l'aimant. Remettez les bras dans la position de départ pour rattacher les ailes.
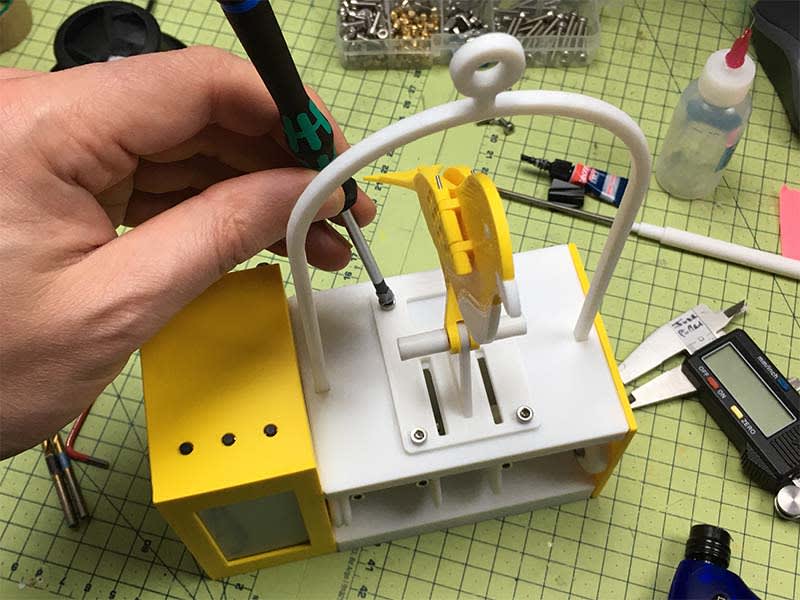
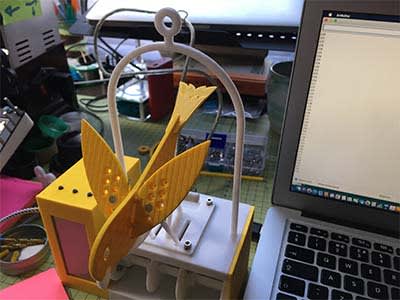
Partie 6 : Position de départ du servo
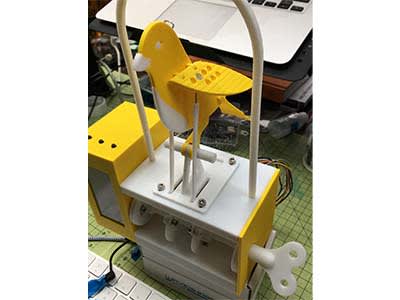
Vous devez maintenant obtenir quelque chose qui ressemble à ceci. Voici un gros plan des « disques » de l'automate. Utilisez la clé pour tourner *doucement* le servo dans le sens inverse des aiguilles d'une montre, jusqu'à ce qu'il s'arrête. C'est votre position de départ.
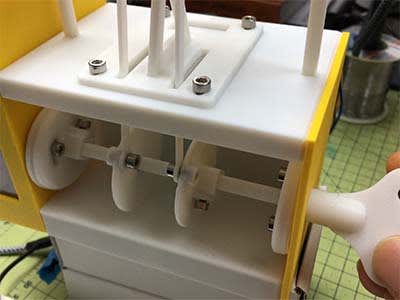
Ce gros plan montre comment j'ai installé les choses, pour que l'unité soit prête à être mise sous tension :
- Le disque de montage du servo est légèrement décalé d'environ 40 degrés par rapport à la position de blocage.
- Les deux roues principales sont espacées de façon à ce que les bras se déplacent librement.
- Les boulons qui maintiennent les bras sont positionnés à environ « 10 heures » si vous regardez de côté avec la clé.
C'est assez proche de la position de départ idéale, mais tournez la clé de 180 degrés dans le sens des aiguilles d'une montre pour voir si le canari passe du battement à la chute, puis à la déconnexion des bras pour qu'il soit complètement « mort ». Si tout cela fonctionne, le code devrait fonctionner à peu près du premier coup.
C'est à ce stade que vous pouvez souhaiter arrêter la construction et passer à la partie code. La raison en est que vous devez toujours accéder à l'Arduino et aux tables d'harmonie FX - en utilisant leurs connexions Micro USB - et pour ce faire, vous devez retirer la base et éventuellement les panneaux arrière. Cependant, si vous êtes d'accord pour les retirer plus tard, alors continuez et terminez la construction...
Partie 7 : Plaque arrière et plaque de base.

Après avoir vérifié l'ajustement des plaques arrière et de base (limez pour ajuster si c'est trop serré), et vérifié l'ajustement avec les vis - vous êtes maintenant prêt à couper de petites sections de PETG (1,0 mm d'épaisseur) ou d'un autre plastique transparent - et à les fixer en place avec de la colle thermofusible chaude. Si vous voulez rendre l'ensemble beaucoup plus solide, je vous suggère de le coller avec de l'époxy - et non de la Super Glue, car celle-ci a tendance à « exploser » (geler en blanc).

Je suggère de placer l'assemblage sur le bord de la table comme indiqué - ceci afin de s'assurer que le Canari ne soit pas déformé lors du vissage de la plaque arrière. Vous remarquerez peut-être que vous devez retirer les deux vis indiquées, puis les remettre en place. Continuez à ajouter des vis pour fixer les deux plaques - Hex M3x6mm pour l'arrière, et CSK (countersunk) M3x6mm pour la base.
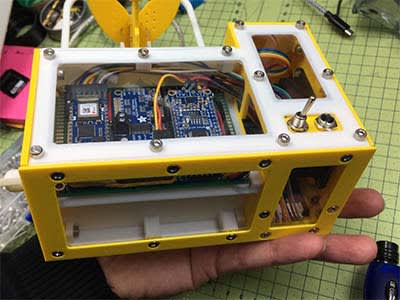
Comme pour le projet RadioGlobe, vous devriez avoir un beau côté visuel, avec une esthétique propre, mais qui peut être tourné pour montrer une vue interne de style « pop-the-bonnet » de toute l'électronique IdO.
Vous êtes maintenant prêt à télécharger le code si vous ne l'avez pas déjà fait. J'avais envisagé de mettre une petite fente dans le fond, mais comme ce modèle doit être à l'épreuve des enfants pour ma maison (et pour RS qui le présentera probablement à un salon professionnel ou autre, j'ai refusé de le faire), car il est peu probable que vous mettiez régulièrement à jour le logiciel (j'espère !). Cependant, les fichiers sont tous open source, alors n'hésitez pas à contribuer à une mise à jour !
Section 4 : Étalonnage du Canari.
Partie 1 : Servo - Étalonnage du code
Maintenant que le code du Canari a été téléchargé et qu'il fonctionne plus ou moins correctement, vous voudrez peut-être « affiner » les mouvements. Voici quelques suggestions d'étalonnage de base du code...
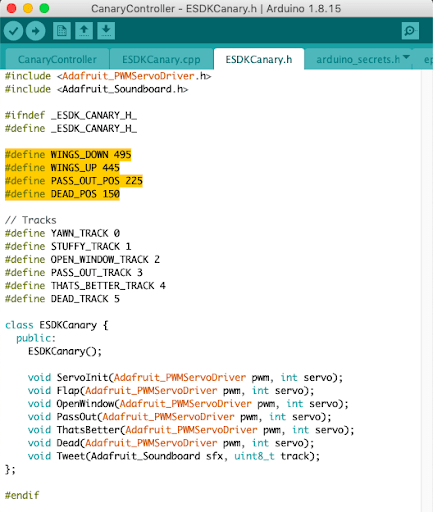
Réglage de la position du servo.
Si vous regardez le fichier ESDKCanary.h dans le fichier CanaryController.ino dans Arduino, vous verrez une section comme suit...(surlignée en jaune ici). Ce sont les positions fondamentales des principaux mouvements du Canary, et correspondent aux positions des servos.
J'ai trouvé que mon servomoteur se déplace de 0 à 180 degrés (légèrement 200 si vous voulez être exact), et que cela correspond à un signal servo de 500-100 dans le code. Cependant, si vous avez déjà travaillé avec des servos, vous savez qu'ils n'aiment pas être maintenus à l'extrémité absolue de leur plage (c'est pourquoi il y a 200 degrés pour un « servo 180 degrés »).
Pour cette raison, j'ai ajusté ma position de départ à 495, plutôt qu'à 500. De même, la position finale ou de « mort » que j'ai trouvée était bien à 150, plutôt que 100, donc j'ai « reculé » pour éviter que le servo ne se fatigue inutilement.
De plus, l'apex de l'aile (point haut) - listé comme WINGS_UP, j'ai trouvé que c'était 450, mais esthétiquement c'était mieux à 445, donc je l'ai changé.
Le PASS_OUT_POS était adéquat à 225, mais vous pouvez trouver vos besoins à 220 ou 230 - et ce sont des modifications faciles à faire au code sans avoir besoin d'une connaissance préalable des Servos ou du code pour travailler avec eux.
Style de battement des ailes
Si vous voulez approfondir le « caractère » des mouvements du canari, vous pouvez ajuster le fichier ESDKCanary.cpp correspondant, où vous pouvez couper et coller des « unités » du code qui créent les volets en appelant les mouvements WINGS_UP et WINGS_DOWN. Vous pouvez par exemple faire en sorte que le canari batte plus souvent en répétant certaines sections, ou l'accélérer ou le ralentir en modifiant le délai (indiqué en jaune, ci-dessous)... Tout cela est configurable à l'infini et prendra tout son sens lorsque vous modifierez un paramètre et verrez ce que le canari fait en réponse.
Partie 2 : Une note sur la mort et la réincarnation (ou l'utilisation à domicile ou publique).
Le code par défaut est écrit de telle sorte que lorsque le CO2 atteint 4000 ppm, le servomoteur tourne sur toute sa course, la force des aimants est vaincue et le canari « meurt ». Ceci met fin au programme (avec une pierre tombale) et, à mon avis, justifie l'effort d'être chargé de remettre manuellement l'oiseau en position, et de redémarrer le programme en appuyant sur le bouton du milieu.
Je pense que si vous avez travaillé à 4000 ppm, vous devriez passer par une tâche légèrement ardue pour vous rappeler de prendre cela au sérieux et d'ouvrir une fenêtre. Il y a un peu de « honte » ici : si je laisse mourir mon canari, mon fils de 5 ans sera légèrement « déçu » que je l'aie laissé « mourir », car j'ai enfreint les règles, et ma femme me grondera probablement pour avoir mal travaillé (et pour avoir été hypocrite en étant l'auteur de ce projet).
Cependant, si c'est trop macabre, ou si vous avez une bonne raison de ne pas vouloir être dérangé pendant que vous travaillez à 4000 ppm de CO2 (peut-être voulez-vous le faire dans un espace public comme une école, un musée ou autre - où la réinitialisation n'est pas pratique), vous pouvez ajuster le code pour déplacer le servo jusqu'à 3000 ppm, ce qui est réversible, et le canari se réincarne en revenant à la position verticale - avec un « Ouf - je vais mieux ».
Commentaires