路径规划技术你可知?
Suivez l'article Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
小编之前为大家介绍了一些机器人,大部分都是简单介绍其功能实现原理,对于其路径规划一直没有谈及,机器人路径规划技术是智能移动机器人研究的核心内容之一,今天小编带领大家一览机器人路径规划技术。
移动机器人路径规划技术就是机器人根据自身传感器对环境的感知,自行规划出一条安全的运行路线,同时高效完成作业任务。移动机器人路径规划主要解决3个问题: (1)使机器人能从初始点运动到目标点(2)用一定的算法使机器人能绕开障碍物,并且经过某些必须经过的点完成相应的作业任务;(3)在完成以上任务的前提下,尽量优化机器人运行轨迹。从机器人对环境感知的角度,将移动机器人路径规划方法分为3种类型: 基于环境模型的规划方法、基于事例学习的规划方法和基于行为的路径规划方法;从机器人路径规划的目标范围看,又可分为全局路径规划和局部路径规划;从规划环境是否随时间变化方面看,还可分为静态路径规划和动态路径规划。
本文从移动机器人路径规划的具体算法与策略上,将移动机器人路径规划技术概括为以下3类:模版匹配路径规划技术、人工势场路径规划技术、地图构建路径规划技术。
1.模版匹配路径规划技术
模版匹配方法是将机器人当前状态与过去经历相比较,找到最接近的状态,修改这一状态下的路径,便可得到一条新的路径。即首先利用路径规划所用到的或已产生的信息建立一个模版库,库中的任一模版包含每一次规划的环境信息和路径信息,这些模版可通过特定的索引取得;随后将当前规划任务和环境信息与模版库中的模版进行匹配,以寻找出一个最优匹配模版;然后对该模版进行修正,并以此作为最后的结果。模版匹配技术在环境确定情况下,有较好的应用效果。
模版匹配路径规划方法原理简单,在匹配成功时效果较好。但该方法的致命缺陷是依赖机器人的过去经验,如果案例库中没有足够的路径模版,就可能找不到与当前状态相匹配的路径;同时该方法主要针对静态环境的路径规划,一旦环境动态变化,则较难找到匹配的路径模版。这些不足严重限制了模版匹配路径规划技术的深入研究与推广应用,因此模版匹配要具有足够匹配的案例(路径)及对环境变化的适应性。
2.人工势场路径规划技术
人工势场路径规划技术的基本思想是将机器人在环境中的运动视为一种机器人在虚拟的人工受力场中的运动。障碍物对机器人产生斥力,目标点对机器人产生引力,引力和斥力的合力作为机器人的控制力,从而控制机器人避开障碍物而到达目标位置。早期人工势场路径规划研究是一种静态环境的人工势场,即将障碍物和目标物均看成是静态不变的。机器人仅根据静态环境中障碍物和目标物的具体位置规划运动路径,不考虑它们的移动速度。然而,现实世界中的环境往往是动态的,障碍物和目标物都可能是移动的。人工势场方法,将时一间看成规划模型的一维参量,而移动的障碍物在扩展的模型中仍被看成是静态的,这样动态路径规划仍可运用静态路径规划方法加以实现。该方法存在的主要问题是假设机器人的轨迹总是已知的,但这一点在现实世界中难以实现。
3.地图构建路径规划技术
地图构建路径规划技术,是按照机器人自身传感器搜索的障碍物信息,将机器人周围区域划分为不同的网格空间(如自由空间和限制空间等),计算网格空间的障碍物占有情况,再依据一定规则确定最优路径。地图构建又分为路标法和栅格法,也称单儿分解法。前者是构造一幅由标志点和连接边线组成的机器人可行路径图,如可视线方法、切线图方法、Voronoi图方法和概率图展开法等。
可视图法将机器人看成一个点,机器人、目标点和多边形障碍物的各顶点进行组合连接,并保证这些直线均不与障碍物相交,便形成一张图,称为可视图。由于任意两直线的顶点都是可见的,从起点沿着这些直线到达目标点的所有路径均是运动物体的无碰路径,路径规划就是搜索从起点到目标点经过这些可视直线的最短距离问题;切线图法和Voronoi图法对可视图法进行了改造。切线图法以多边形障碍物模型为基础,任意形状障碍物用近似多边形替代,在自由空间中构造切线图,因此从起始点到目标点机器人是沿着切线行走,即机器人必须几乎接近障碍物行走,路径较短。但如果控制过程中产生位置误差,移动机器人碰撞的可能性会很高。Voronoi图由一系列的直线段和抛物线段构成。直线由两个障碍物的顶点或两个障碍物的边定义生成,直线段上所有点必须距离障碍物的顶点或障碍物的边相等。抛物线段由一个障碍物的顶点和一个障碍物的边定义生成,抛物线段同样要求与障碍物顶点和障碍物的边有相同距离。与切线法相比,Voronoi图法从起始节点到目标节点的路径将会增长,但采用这种控制方式时,即使产生位置误差,移动机器人也不会碰到障碍物,安全性较高。图1为切线图法与Voronoi图法示意图。

(a)切线图 (b) Voronoi图
图1 切线图法与Voronoi图法
栅格法是将机器人周围空间分解为相互连接且不重叠的空间单儿:栅格(cell),由这些栅格构成一个连通图,依据障碍物占有情况,在此图上搜索一条从起始栅格到目标栅格无碰撞的最优路径。这其中根据栅格处理方法的不同,又分为精确栅格法和近似栅格法,后者也称概率栅格法。精确栅格法是将自由空间分解成多个不重叠的单儿,这些单儿的组合与原自由空间精确相等,如图2就是常用的一种精确栅格分解法—梯形栅格分解。
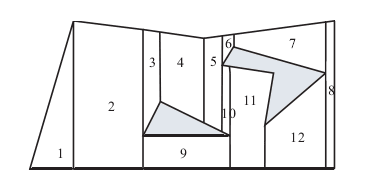
图2 梯形栅格分解示意图
Commentaires