DIY一个简易的机械手臂
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
在自动化程度高速发展的今天,无论在工业还是在生活中都出现自动化的机械装置,机器人的发展更是受到欢迎和追捧。本文给大家介绍一下如何制作一款属于自己的小型六自由度的机械手臂,来激发学习机器人的兴趣,也是电子爱好者不错的桌面装饰。
机械手臂主要是由舵机、控制器、支架、机械抓、简单的供电电路组成,掌握了用控制器控制舵机,就能自己让机械手臂完成自己设想的动作了。
制作过程
所需材料
多功能支架、螺丝、螺母、DS3115舵机、32路控制器、降压芯片、导线、电池等。
舵机的控制
舵机是一个伺服电机,可以精确调整旋转角度,舵机的控制简单,由三根接线,接地线、VCC和信号线组成。只要通过信号线给舵机输入合适的PWM波,就能控制舵机的旋转方向和角度。而PWM波的产生,市面上很多控制芯片比如51、AVR单片机、飞思卡尔、DSP等都能够产生。
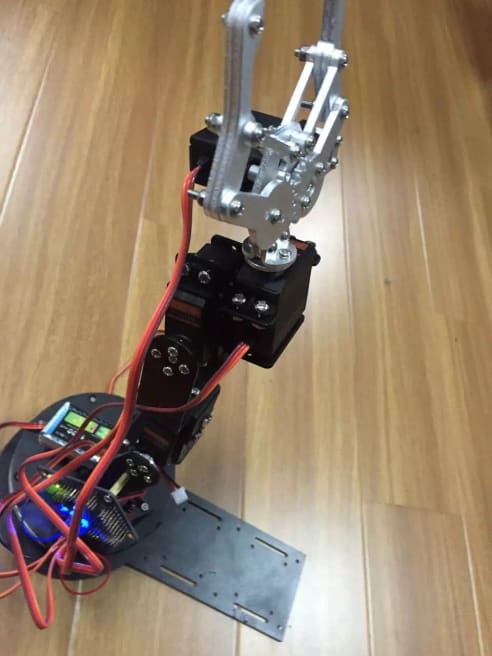
舵机组装
组装:运用支架、螺丝、螺母把舵机连接起来,构成机械手臂的主体,注意的一点是安装舵机时候要先调整好舵机的角度,尤其180°和360°舵机,可以使舵机的活动幅度最大。下图为舵机的连接图。

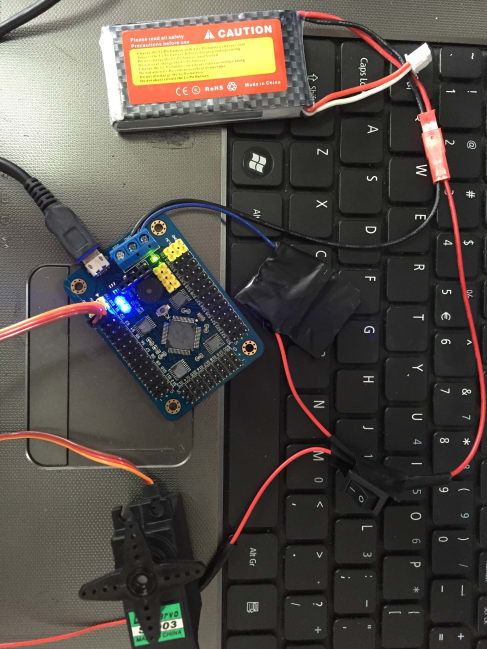
电路接线图
控制接线图,这个简易的机械手臂的接线图比较简单,控制板和舵机的供电电路。下图为机械手臂供电电路和舵机调试图。
舵机的调试
组装和接线完成后,就可以通过调试让机械手臂完成你想实现的动作了。首先测试一下舵机的转动,然后通过调整PWM的占空比,调节各个舵机的运动,组成一个你想实现的动作组。我简单设计了一组搬运物块的动作,点击下面的视频播放。
多次调试说明,整个机械手臂的控制精度还是比较高的,可以实现更多复杂的动作。控制芯片还可以添加无线和蓝牙模块,实现无线遥控执行动作。
Commentaires