自主系统开发平台
关注文章
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
我对机器人的热爱始于我在国防工业工作的那段时间。我注意到有巨额资金投入到当时我们称为“自主系统”的研发中,这类系统应用极其广泛,有海底测绘、海洋学,甚至还有扫雷,以补充海军部门发展的不足,减少高科技、低型深船只的配员。当然,当我从事汽车行业后,我发现在无人驾驶技术迅速发展,以及大型技术公司加速完善商业产品设计,引发大众热潮的大背景下,更多的人们开始意识到该技术的发展。
有了该技术推动当代机器人的发展,我兴起了自己设计搭建一个模块化、创客友好的自主系统开发平台的念头。以下记录了系统搭建的全过程。

零件清单:
- 4x 250mm 塑料和橡胶材质的实心轮
- 4x 8mm 联轴器和平头螺钉
- 4x 12v DC 齿轮电动机
- 4 芯多股电缆
- 2x IP68 电缆夹套
- 通用型热缩管
- M8 螺栓
- M8 普通六角螺母(可使用尼龙材质)
- M8 螺钉
- M8 平垫圈
- Gewiss GW-44-207 IP56 外壳
- 1500mAh 锂电池
- 定制 3D 打印电池座,带 M4x30 固定螺钉和螺母
- Molex 连接器组件
- 单芯电缆
- M4 自攻螺钉
- 定制印刷电路板
- 3mm 铝板
- SPST 拨动开关
值得注意的是,在此之前我已完成项目的设计,其中包含大量通过 DesignSpark 进行的印刷电路板和机械软件 CAD 工作。
底盘
铝制底盘侧板用于安装电机和电子设备外壳,同时用于固定螺栓,形成完整的上部机械结构。最初的底盘是以生锈废钢为原料手工制成,运行良好,但做工有些粗糙。因此我决定借助 CAD,以轻质铝板为原料,并使用合适的数控机床切割底盘板件。制图见下方。

DesignSpark Mechanical
电机
所有的主驱动电机都安装在底盘侧板上,分别用 4 颗 M4 螺钉固定。选定的电机具有高传动比,以便在必要的时候增大扭矩,转动连接在每个电机上的大号轮子。电机的四轮驱动效应可为机器人带来出色的牵引力。目前为止,我操纵它爬上 45 度木质斜坡,没有出现滑移;还操纵它攀爬垂直砖墙并翻倒,从而测试它的倒置操作。
该机器人的设计不同于带复杂转向联动装置的传统车辆,而是可以像坦克一样凭借四轮驱动原地转向,从而适应崎岖地形。请注意车长和轴距之比并未像汽车设计一样使用黄金比例 (1:1.6),而是使用了 1:1 的比例,以便在滑动转向时产生完美的扭矩矢量。

滚轮
我为该平台选择了塑料和橡胶材质的大号实心轮,在复杂地形下表现出色,兼具良好的牵引力和最小离地间隙。由于轮子的保护作用,机器人的底盘基本不可能撞上宽阔平面。8mm 联轴器用强力胶水固定在的空心轮轴内,一半插入,另一外裸露在外,同样裸露在外的平头螺钉用于连接轮子和电机轴。

机箱
我选用了 IP 级外壳,用于阻隔机器人在行驶环境中可能遇到的泼溅或雨水。外壳安装在铝制底盘上,两侧各有 2 个用于安装 M8 螺栓、螺母和垫圈的钻孔,可增强整体结构的强度。外壳前后两侧上还有其它钻孔,用于安装 IP 级电缆固定头,此外后侧还有一个安装拨动开关的钻孔。

印刷电路板和控制系统设计
默认系统能够像 ROV,即“遥控无人潜水器”一样运行,可用于基础遥测工作。它还可以通过多种创客开发套件中包含的 I/O 扩展件进行增强,从而快速、轻松地扩展至完全自主系统。
这种设计思路的硬件体系包括用于智能手机控制和遥测的蓝牙收发器;带 Arduino 引导加载程序的 Atmel ATMEGA328P-PU 集成电路,用于简易 UART 编程;以及 Analogue、I2C 和 SPI 界面终端,用于连接多个集成电路、屏蔽和 Raspberry Pi 在内的开发板。
执行器控制通过一对由可兼容 PMW 的 ATMEGA 数字引脚控制的 MOSFET H 桥电路实现。该电路的电源为 1500mAh 11.1v 锂电池,但微控制器逻辑部分的电压调节至 5v,需通过缓冲器增大至 11.1v 以驱动电机。使用加粗的印刷电路板铜线,尽可能减少 I2R 损失以及因任何电流产生的过热。

DesignSpark PCB
电池和印刷电路板通过单芯电缆相连,并通过简单的串联拨动开关打开/关闭。通过使用 Molex 连接器组件,我设计了易拆卸的电池,以便在不拆下任何印刷电路板端子块的情况下给电池充电。4 芯多股电缆用于连接前后电机,H 桥电路分别控制左右电机电路。
我通过 Eurocircuits 的“裸式原型”在线服务定购了印刷电路板,经济实惠。
3D 打印电池座
之前的设计存在一个问题,即当平台四处行驶时,电池会出发出“哐啷哐啷”的声音。我决定尝试用易拆卸的内置式电池座对电池进行固定,如此一来设计将更加坚固。我通过 DesignSpark Mechanical 快速创建了设计图并导出,以 PLA 为原料打印。凭借这一设计,我可以用 M4 螺钉牢牢固定电池,再也不用担心它撞上印刷电路板部件。

DesignSpark Mechanical
智能手机应用程序
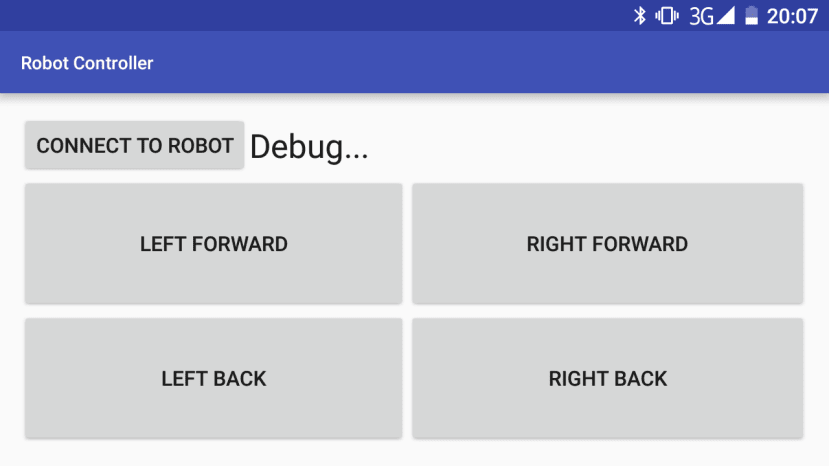
在控制系统上使用蓝牙收发器,可实现基础的 IOT 连接,并可直接控制平台的机械电子元件。该应用最令人激动的一点是,可以通过最基础的 Android 智能手机应用程序实施远程操作,控制轮子的左、右行进方向。蓝牙控制的新颖之处在于无需使用独立控制器,而只需要采用常见 ISM 多址频带的普通智能手机或平板。尽管如此,这也表示信号带宽较窄,后期的平台设计迭代将必须使用经过改良的无线电系统和功率更大的基站,才能实施扩展任务。
视频
结论
本项目是以我的本科论文为基础,在我对自主机器人和无人驾驶技术的兴趣驱使下,不断升级改进平台,最终得以完成。这些机器人能够实现各种令人惊叹的任务,我也因此不断受到启发。所以我希望将我在全地形自主开发平台上研发成果进行放大,登上更大的世界舞台,例如达喀尔拉力赛。随着目标的提高,我也无疑将继续研发我的设计构想。