【转载】电机(马达)是如何工作的?
关注文章 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
原作者:苏老师
转载自:https://mp.weixin.qq.com/s/1-4TBAYCjYJbeJeuEaF9ww
无疑,就像传感器的发展一样,电机(Motor、马达)越来越重要,会遍布我们生活的各个角落,几乎从未跟电机打过交道的苏老师也开始关心电机的工作原理、不同种类以及应用场景。
由于没有在项目中亲密接触电机,虽然看了一些文章,仍然是一头雾水,正巧看到一些文章中的有些动图,觉得对于理解电机的工作原理有帮助,就分享在这里,后面还有一篇比较完整的关于电机工作的英文文章,一并附上,有兴趣的同学可以阅读一下。
BTW,苏老师的学生都要专业英语非常厉害才行,所以要强迫自己阅读英文的文章。
原理动态图
电机(俗称"马达")是指依据电磁感应定律实现电能转换或传递的一种电磁装置。它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。
直流电机
将直流电能转换为机械能的电动机。因其良好的调速性能而在电力拖动中得到广泛应用。直流电动机按励磁方式分为永磁、他励和自励3类,其中自励又分为并励、串励和复励3种
交流电机
永磁电机

量子磁电机
单相感应电机
单相电机一般是指用单相交流电源(AC220V)供电的小功率单相异步电动机。这种电机通常在定子上有两相绕组,转子是普通鼠笼型的。两相绕组在定子上的分布以及供电情况的不同,可以产生不同的起动特性和运行特性。通常根据电动机的起动和运行方式的特点,将单相异步电动机分为单相电阻起动异步电动机、单相电容起动异步电动机、单相电容运转异步电动机、单相电容起动和运转异步电动机、单相罩极式异步电动机五种。

三相感应电机

无刷直流电机
步进式电机
将电脉冲信号转变为角位移或线位移的开环控制元件。它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
平衡式电机
鼠笼式电机


电机解剖图
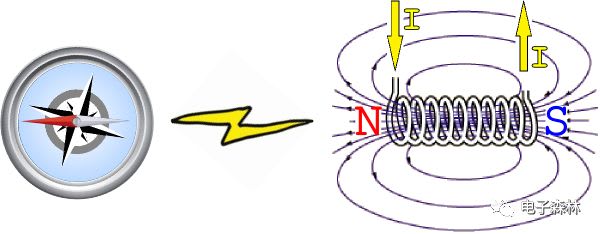
电机磁场变化图

电动机主要包括一个用以产生磁场的电磁铁绕组或分布的定子绕组和一个旋转电枢或转子和其它附件组成。在定子绕组旋转磁场的作用下,其在电枢鼠笼式铝框中有电流通过并受磁场的作用而使其转动。

定子(静止部分)
-
定子铁心:电机磁路的一部分,并在其上放置定子绕组;
-
定子绕组:是电动机的电路部分,通入三相交流电,产生旋转磁场;
-
机座:固定定子铁心与前后端盖以支撑转子,并起防护、散热等作用;
直流发电机
直流发电机的工作原理就是把电枢线圈中感应产生的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势, 因为电刷 A 通过换向片所引出的电动势始终是切割N 极磁力线的线圈边中的电动势。所以电刷 A 始终有正极性,同样道理,电刷 B 始终有负极性。所以电刷端能引出方向不变但大小变化的脉动电动势。
转子(旋转部分)
-
转子铁心:作为电机磁路的一部分以及在铁心槽内放置转子绕组;
-
转子绕组:切割定子旋转磁场产生感应电动势及电流,并形成电磁转矩而使电动机旋转;

下面是网站www.sparkfun.com上的一篇关于电机及分类选型的文章。
Introduction:
At any given moment, you are near at least one or two types of motors. From the vibration motor in your cell phone, to the fans and CD drive in your favorite gaming system, motors are all around us. Motors provide a way for our devices to interact with us and the environment. With a myriad of applications for motors, the design and operation of them can vary.
What You Will Learn
In this tutorial we'll cover some of these basic motor types and uses:
-
DC Brush Motors
-
Brushless Motors
-
Stepper Motors
-
Linear Motors
What Makes A Motor Move?
The most vague and simple answer is magnetism! Ok, now let's take this simple force and turn it into a super car!

To keep things simple, we will need to look at some concepts through the lens of the thought experiment. Some liberties will be taken, but if you want to get down and dirty with the details, you can consult Dr. Griffiths. For our thought experiment, we are going to state that a magnetic field is produced by a moving electron i.e. current. While this creates a classical model for us to use, things break down when we reach the atomic level. To understand the atomic level of magnetism more, Griffiths explains that in another book...
Electromagnetism
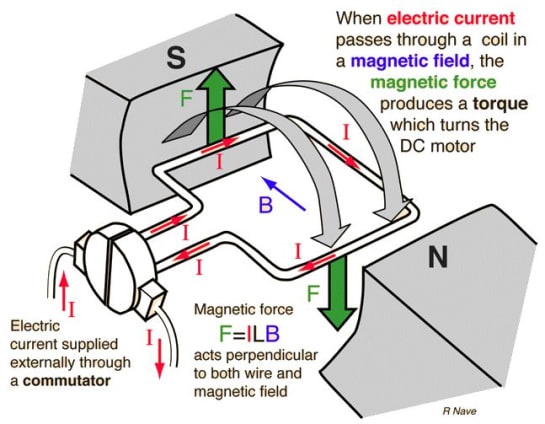
To create a magnet or magnetic field, we are going to have to look at how they are generated. The relationship between current and magnetics field behave according to the right-hand rule. As current passes through a wire, a magnetic field forms around the wire in the direction of your fingers as they wrap around it. This is a simplification of Ampère's force law as it acts on a current carrying wire. Now, if you place that same wire in a pre-existing magnetic field, you can generate a force. This force is referred to as the Lorentz force.

The right-hand rule shows the direction of the magnetic field in relation to the current path.
If the current is increased, the strength of the magnetic field is strengthened. Though, to do something useful with the field, it would take incredible amounts of current. Furthermore, the wire delivering the current would be carrying the same magnetic strength, thus creating uncontrolled fields. By bending the wire into a loop, a directed and concentrated field can be created.

The field has not changed. By bending the wire into a loop, field directions are simplyaligned.
Electromagnets
By looping wire and passing a current, an electromagnet is created. If one loop of wire can concentrate the field, what can you do with more? How about a few hundred more! The more loops you add to the circuit, the stronger the field becomes for a given current. If that's the case, why don't we see thousands **, if not **millions, of windings in motors and electromagnets? Well, the longer the wire the higher resistance it has. Ohm's law (V = I*R) says to maintain the same current as resistance increases, voltage must increase. In some cases it makes sense to use higher voltages; in other cases some use larger wire with less resistance. Using larger wire is more costly and is generally more difficult to work with. These are factors that have to be weighed when designing a motor.

An energized electromagnet producing a magnetic field.
Experiment Time
To create your own electromagnet, simply find a bolt (or other round steel object), some magnet wire (30-22 gauge works fine), and a battery.
Note: Lithium Batteries are NOT recomended for this experiment.

Wrap between 75-100 turns of wire around the steel. Using a steel center further concentrates the magnetic field, increasing its effective strength. We will go over why this is happens in the next section.


A bit of heat shrink or tape can help keep the coils on the steel center.
Now, using sand paper, remove the insulation from the ends of the wires, and connect each wire to each terminal of the battery. Congratulations! You have built the first component of a motor! To test the strength of your electromagnet, try to pick up paper clips or other small steel objects.

It's not magic, it's SCIENCE!!!
Ferromagnetism
Looking back to the beginning of our thought experiment, magnetic fields may only be produced by a current. Taking the definition of current as a flow of electrons, electrons orbiting an atom should create a current and thus a magnetic field! If every atom has electrons is everything magnetic? YES! All matter, including frogs, can express magnetic properties when given enough energy. But not all magnetism is created equally. The reason I can pick up screws with a refriderator magnent and not a frog is the difference between ferromagnetism and paramagnetism. The way to differentiate the two (and a few more types) is through the study of quantum mechanics.
Ferromagnetism will be our focus, since it is the strongest phenomenon and is what we have the most experience with. Further, to relieve us from having to understanding this at the quantum level, we are going to accept that atoms of ferromagnetic materials tend to align their magnetic fields with their neighbors. Though they tend to align, inconsistencies in material and other factors like crystaline structure create magnetic domains.

When magnetic domains are aligned in a random order, neighboring fields cancel each other out resulting in a non-magnetized material. Once in the presence of an strong external field it is possible to re-align these domains. By aligning these domains, the overall field strengthens, creating a magnet!

This re-alignment can be permanent depending on the strength of the field. This is great because we'll need these in the next section.
Permanent Magnets
Permanent magnets behave in the same way as electromagnets. The only difference is, well, they are permanent.

In all drawings, arrows will be pointing away from the north pole and towards the south pole. Another convention is to use the color red to represent north and blue to represent south. To identify a magnets polarity, you can use a compass. Since opposites attract, the needle will point north to the south pole of the magnet.

You can perform the same experiment with an electromagnet to determine polarity.

If you reverse the flow of current, you can see how an electromagnet can reverse its poles.
This is a key principle for building motors! Now, let's look at some different motors and how they use magnets and electromagnets.
DC Brush Motors - The Classic

The DC brush motor is one of the simplest motors in use today. You can find these motors just about anywhere. They are in household appliances, toys, and automobiles. Being simple to construct and control, these motors are the go-to solution for professionals and hobbyists alike.
The Anatomy of a Brush Motor

To better understand how one works, let's start by tearing down a simple hobby motor. As you can see, they are simple in construction, comprising of a few key components.

-
Brushes - Delivers power from the contacts to the armature through the commutator
-
Contacts - Brings power from the controller to the brushes
-
Commutator - Delivers power to the appropriate set of windings as the armature rotates
-
Windings - Converts electricity to a magnetic field that drives the axle
-
Axle - Transfers the mechanical power of the motor to the user application
-
Magnets - Provide a magnetic field for the windings to attract and repel
-
Bushing - Minimizes friction for the axle
-
Can - Provides a mechanical casing for the motor
Theory of Operation
As the windings are energized, they attract to the magnets located around the motor. This rotates the motor until the brushes make contact with a new set of commutator contacts. This new contact energizes a new set of windings and starts the process again. To reverse the direction of the motor, simply reverse the polarity on the motor contacts. Sparks inside a brush motor are produced by the brush jumping to the next contact. Each wire of a coil is connected to the two closest commutator contacts.

An odd number of windings is always used to prevent the motor from getting locked into a steady state. Larger motors also use more sets of windings to help eliminate "cogging," thus providing smooth control at low revolutions per minute (RPMs). Cogging can be demonstrated by rotating the motor axle by hand. You will feel "bumps" in the motion where the magnets are closest to the exposed stator. Cogging can be eliminated with a few tricks in design, but the most prevalent is removing the stator all together. These types of motors are referred to as ironless or coreless motors.
Pros
-
Simple to control
-
Excellent torque at low RPM
-
Inexpensive and mass produced
Cons
-
Brushes can wear out over time
-
Brush arcing can generate electromagnetic noise
-
Usually limited in speed due to brush heating
Brushless Motors - MORE POWER!

Brushless motors are taking over! Ok, maybe that was an overstatement. However, brushless motors have begun to dominate the hobby markets between aircraft and ground vehicles. Controlling these motors had been a hurdle up until microcontrollers became cheap and powerful enough to handle the task. There is still work being done to develop faster and more efficient controllers to unlock their amazing potential. Without brushes to fail, these motors deliver more power and can do so silently. Most high-end appliances and vehicles are moving to brushless systems. One notable example is the Tesla Model S.
The Anatomy of a Brushless Motor

To better understand how one works, let's start by tearing down a simple brushless motor. These are commonly found on remote control airplanes and helicopters.

-
Windings - Converts electricity to a magnetic field that drives the rotor
-
Contacts - Brings power from the controller to the windings
-
Bearings - Minimizes friction for the axle
-
Magnets - Provide a magnetic field for the windings to attract and repel
-
Axle - Transfers the mechanical power of the motor to the user application
Theory of Operation
The mechanics of a brushless motor are incredibly simple. The only moving part is the the rotor, which contains the magnets. Where things become complicated is orchestrating the sequence of energizing windings. The polarity of each winding is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity, giving each winding a "push/pull" effect. The trick is keeping this pattern in sync with the speed of the rotor. There are two (widely used) ways this can be accomplished. Most hobby controllers measure the voltage produced (back EMI) on the un-energized winding. This method is very reliable in high velocity operation. As the motor rotates slower, the voltage produced becomes more difficult to measure and more errors are induced. Newer hobby controllers and many industrial controllers utilize Hall effect sensors to measure the magnets position directly. This is the primary method for controlling computer fans.

Pros
-
Reliable
-
High speed
-
Efficient
-
Mass produced and easy to find
Cons
-
Difficult to control without specialized controller
-
Requires low starting loads
-
Typically require specialized gearboxes in drive applications
Stepper Motors - Simply Precise


Stepper motors are great motors for position control. They can be found in desktop printers, plotters, 3d printers, CNC milling machines, and anything else requiring precise position control. Steppers are a special segment of brushless motors. They are purposely built for high-holding torque. This high-holding torque gives the user the ability to incrementally "step" to the next position. This results in a simple positioning system that doesn't require an encoder. This makes stepper motor controllers very simple to build and use.
The Anatomy of a Stepper Motor

To better understand how one works, let's start by tearing down a simple stepper motor. As you can see, these motors are built for direct drive loads containing a few key components.

-
Axle - Transfers the mechanical power of the motor to the user application
-
Bearings - Minimizes friction for the axle
-
Magnets - Provide a magnetic field for the windings to attract and repel
-
Poles - Increases the resolution of the step distance by focusing the magnetic field
-
Windings - Converts electricity to a magnetic field that drives the axle
-
Contacts - Brings power from the controller to the windings
Theory of Operation
Stepper motors behave exactly the same as a brushless motor, only the step size is much smaller. The only moving part is the the rotor, which contains the magnets. Where things become complicated is orchestrating the sequence of energizing windings. The polarity of each winding is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity, giving each winding a "push/pull" effect. A notable difference is how the magnet structure of a stepper is different. It is difficult to get an array of magnets to behave nicely on a small scale. It's also very expensive. To get around this, most stepper motors utilize a stacked plate method to direct the magnetic poles into "teeth".
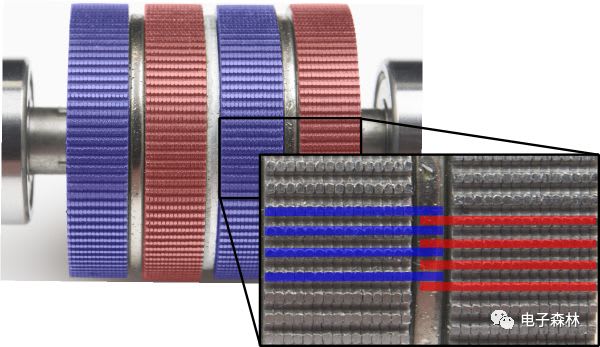
In a brushless motor, back EMF is used to measure velocity. A stepper relies on the short throw of each winding to "guarantee" it reaches the desired point in time. In highspeed travel, this can lead to stalling where the rotor can't keep up with the sequence. There are ways around this, but they rely on a higher understanding of the relationship between motor windings and inductance.
Pros
-
Excellent position accuracy
-
High holding torque
-
High reliability
-
Most steppers come in standard sizes
Cons
-
Small step distance limits top speed
-
It's possible to "skip" steps with high loads
-
Draws maximum current constantly
Linear Motors - The Future!!!

The future is linear! In high-speed pick and place machines speed is everything. With speed comes friction, with friction comes maintanence, with maintanance comes downtime, with downtime comes lost productivity. By removing the components needed to transfer rotary to linear motion, the system becomes much lighter and more efficient. Linear motors are simple to maintain, and, with only one moving part, are incredibly reliable. Did I mention they are incredibly fast?! This is the pick and place machine we are using in production, and it is incredibly fast! This machine also packs such a punch, there is a warning for pacemakers on it. There is an entire row of high-power, rare-earth magnets.
The Anatomy of a Linear Motor
To better understand how one works, let's look inside our pick and place machine downstairs.
-
Motion Module - Contains electromagnets and controller.
-
Magnets - Provide a magnetic field for the coils to attract and repel
-
Linear Bearning - Keeps the motor in alignment with magnets and is the only moving part.

Theory of Operation
The mechanics of a linear motor is nearly identical to a brushless motor. The only difference is if you were to take a brushless motor and unfold it into a straight line you'd have a linear motor. The Motion Module is the only moving part. Where things become complicated is orchestrating the sequence of energizing coils. The polarity of each coil is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity giving each coil a "push/pull" effect. In a linear motor, there is typically an encoder or some advanced positioning system to keep track of the location of the Motion Module. To reach a high position accuracy, the controllers are much more complicated than anything found on a conventional system. Microstepping is a method to "throttle" the magnets to provide smooth and precise motion. To achieve this though, linear motors require a highly specialized controller tuned for each motor. As controller technology improves, we are likely to see these motors decrease in price. Maybe someday our 3D printers will print in seconds and not hours!
Pros
-
Reliable
-
High speed
-
Efficient
-
No rotary to linear conversion required
Cons
-
Expensive
-
Require custom controllers
-
Purpose built for each system
-
Did I mention expensive?
Resources and Going Further
So we took a look at some different types of motors and how they might be used. Selecting a motor will require you to first determine the application requirements. With these requirements, you can look at the strengths and weaknesses of each motor type. But more importantly, look for the ratings on each motor. Each motor will have values for input power and output power. You can calulate the load requirements of a system but, sometimes it's easy enough to just try it! To give yourself a headstart integrating motors, take a look as some of these pages:
-
Gear Ratios
-
Bearings
-
Chain drives
-
Pulse Width Modulation
-
H-Bridges for motor control
-
Ardumoto Quickstart Guide