Capteur de position inductif Renesas - IPS2550
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
Le IPS2550 est un capteur de position inductif sans aimant qui peut être utilisé pour la détection de position absolue à grande vitesse dans les applications automobiles, industrielles, médicales et grand public. Le IPS2550 utilise le principe physique des courants de Foucault pour détecter la position d'une cible métallique simple qui se déplace au-dessus d'un ensemble de bobines, composé d'une bobine émettrice et de deux bobines réceptrices.
Caractéristiques du produit :
| VEL | 600,000 RPM Max. |
|---|---|
| Précision (3,3V) | +/- 0.2 %FS |
| Précision (5,0V) | +/- 0.1 %FS |
| Limites de température | -40C to 160C |
Consultez la Fiche technique du IPS2550 pour obtenir des informations plus détaillées sur le produit. Des circuits intégrés pour capteurs de mouvement comme le IPS2550 sont disponibles pour vous chez RS.
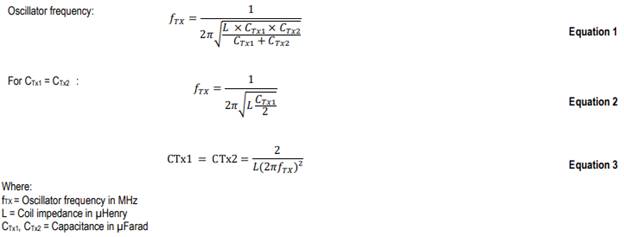
La fréquence de l'oscillateur est déterminée par les valeurs de la bobine Tx L et des condensateurs CTx1 et CTx2 comme suit :
Le système de poursuite angulaire illustré ci-dessous est une conception « en direct et accordable ». Vous pouvez modifier n'importe lequel des paramètres du système qui sont indiqués en bleu, afin de répondre aux exigences spécifiques de votre application. Il vous suffit ensuite de lancer une nouvelle simulation (en cliquant sur la flèche verte « play ») pour voir les résultats de ces modifications.
Cet exemple d'application démontre la capacité de l'IPS2550 à suivre la rotation d'un arbre cible pendant qu'il effectue une rotation mécanique complète, de 0 à 2*Pi (6,28 radians) en 0,2 msec. Cela équivaut à 300 000 tours par minute. L'utilisateur peut modifier de nombreux paramètres de conception pour voir comment ils affectent la capacité du système à suivre cette rotation angulaire. Il s'agit notamment de la « forme » de la cible du capteur de position inductif (IPS) (c'est-à-dire les cycles électriques par révolution mécanique), de l'inductance du capteur et des valeurs de capacité externe qui fixent la fréquence d'oscillation, de la tension d'alimentation d'entrée (Vdd), et même de la capacité du filtre passe-bas analogique, du nombre de bits de quantification et de la fréquence d'échantillonnage pour l'algorithme de détection de l'angle.
Essayez vous-même !
Si vous modifiez le paramètre IPS ‘n’ (cycles électriques cibles par tour d'arbre) de 1 à 2 et relancez la simulation, vous verrez comment le système se comporte à la vitesse de rotation « électrique » maximale effective de 600 000 tr/min. Vous pouvez également modifier les condensateurs du filtre passe-bas sur une large gamme de valeurs, pour voir l'effet sur la réduction souhaitée du bruit du produit de démodulation, mais aussi sur le retard ou le déphasage indésirable de l'angle de rotation détecté.
N'hésitez pas à essayer d'autres configurations de système. Notez que vous pouvez également déplacer les sondes de forme d'onde (oscilloscope) pour voir d'autres signaux sur les réseaux ou internes à n'importe quel composant du schéma.
Commentaires