Carte Arduino associée à des capteurs Ultrasonic pour un contrôle automatique de robinet
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
À propos de ce projet :
Concernant la gestion responsable de l'eau, nous sous-estimons quelques-uns des faits suivants :
- Laisser couler l'eau du robinet pendant que l'on se brosse les dents peut gaspiller 15 litres d'eau.
- Les fuites de robinets à raison d'une goutte par seconde peuvent gaspiller jusqu'à 10 220 litres chaque année.
- Les douches et les bains sont les principales sources de consommation d'eau (27 %) dans un environnement domestique.
- Environ 95 % de l'eau entrant dans nos foyers repart à l'égout.

Ce projet vise à appliquer une technique adaptée de gestion de l'eau dans un environnement domestique en économisant l'eau gaspillée par les robinets qui fuient ou restent ouverts en les automatisant.
Voici comment nous allons procéder :
L'installation est illustrée ci-dessous. Dès qu'une main est détectée sous le robinet, le servomoteur ouvre le robinet et vérifie la présence en continu. Lorsque l'utilisateur retire ses mains, le robinet s'arrête immédiatement. Cela permet d'utiliser uniquement le robinet lorsque nécessaire et d'économiser une eau précieuse.
Avantages :
Un robinet ordinaire a un débit de 7,5 litres par minute. En fermant simplement le robinet, nous pouvons économiser plus de 378 litres par personne et par mois. Le simple fait de se brosser les dents ou se laver les mains en laissant l'eau couler consomme environ 7 litres d'eau par jour et 2 585 litres d'eau par an. En appliquant notre système, nous pourrions économiser la majeure partie de ce volume qui pourrait être ensuite utilisée de façon positive et contribuer à réduire les problèmes de raréfaction de l'eau.
À faire soi-même :
Conditions requises :
- Arduino Uno (R3) (715-4081)
- Servomoteur (SM-S2309S)
- Capteur Ultrasonic (HC-SR04)
- Afficheur LCD 16 x 2 (214-3301)
- Platine de montage (485-3892)
- Soudage + fer à souder (859-9312)
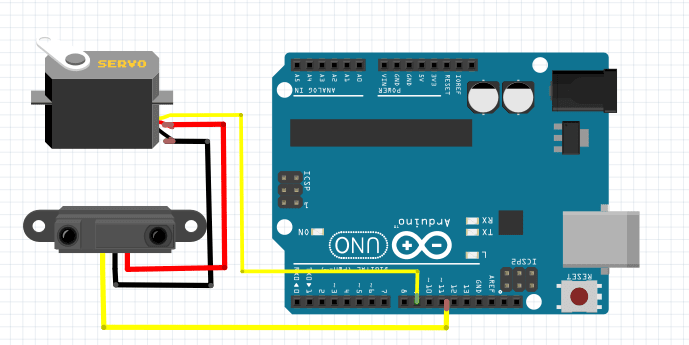
Connexions de circuits :
- Broche de signal de servomoteur connectée à la broche Arduino ~9.
- Les broches Écho et Déclenchement du capteur Ultrasonic sont connectées aux broches 12 et ~11 de la carte Arduino, respectivement.
- Connexions LCD ci-dessous :
|
Broches LCD |
Broches Arduino |
|
VEE |
GND |
|
RS |
~6 |
|
RW |
GND |
|
EN |
7 |
|
D4 |
~5 |
|
D5 |
4 |
|
D6 |
~3 |
|
D7 |
2 |
-
Toutes les broches VCC et GND des différents composants sont connectées aux broches correspondantes de la carte Arduino UNO.
Quelques connaissances de base en soudure sont nécessaires : pour ce projet, j'ai créé mon propre shield de façon à pouvoir utiliser les composants requis en "Plug and play". Voici comment procéder :- Choisissez une platine de montage de qualité (j'utilise généralement des platines UNIVOLT)
- Coupez cette platine aux dimensions correspondant à la carte Arduino.
- Placez ensuite vos composants sur cette platine pour vérifier la disposition.
- Une fois satisfait, soudez les connecteurs Berg mâles en conséquence.
- Créez des connexions comme expliqué plus haut.
- Insérez votre shield personnalisé dans la carte Arduino et branchez tous les composants dessus.

Installation sur le lavabo :
- Reliez un mécanisme de coupure adapté au servomoteur, comme illustré dans la vidéo.
- Connectez ce mécanisme avec du fil qui s'enroule autour de la tête d'un robinet tournant.
- Placez et fixez le servomoteur à une certaine distance du robinet, de façon à générer un couple parfaitement adapté. J'ai utilisé un adhésif de marque M-seal pour ce faire.
- Ensuite, placez un capteur ultrasonique juste en dessous du robinet en vous assurant que l'eau ne l'affecte pas et que des relevés corrects sont garantis.
- Branchez l'écran LCD.
- Il ne vous reste plus qu'à charger le code et profiter de votre robinet automatisé.
- Regardez la vidéo pour mieux voir le produit fini.
Discussion autour du code :
- Le code utilise trois bibliothèques, dont l'une, LiquidCrystal.h>, doit être importée de façon externe. Vous trouverez cette bibliothèque dans le dossier.
- La valeur de distance requise pour déclencher le servomoteur dépend de l'environnement. Par conséquent, vous devez étalonner au préalable votre capteur ultrasonique pour la même raison.
- D'autre part, l'angle de rotation du servomoteur peut varier en fonction du robinet utilisé. Il est donc tout aussi important de répéter l'étalonnage à ce stade.
- J'ai également inclus dans mon code l'impression série de la distance à chaque fois que le capteur ultrasonique se met à jour. Cette section est facultative.
- J'ai utilisé une variable "allow" qui garantit que les mêmes instructions conditionnelles ne sont pas exécutées de façon consécutive. Cela permet de rendre l'exécution du projet plus fluide.
Galerie :




Téléchargements
-----------------------------------------------------------------------------------------------------------------
GANEEV SINGH est étudiant en électronique et communications préparant un "Bachelor of Technology" à l'IP University de Delhi. Ses principaux centres d'intérêt sont l'électronique, les systèmes embarqués, la robotique et l'automatisation. Il espère poursuivre ses études dans ce domaine au niveau Master et contribue actuellement à des projets d'ingénierie avec RS Components & Controls (I) Ltd. qui seront publiés sur www.designspark.com.
Commentaires