RealCycle - Smart Plastic Recycling Bin
Follow project Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
 In Hong Kong, only 4% of plastic bottles are successfully being recycled. This is due to contamination, types and high volume of plastic bottles. To address it, we ideate a smart bin that could identify the cleanliness and type of plastic bottles.
In Hong Kong, only 4% of plastic bottles are successfully being recycled. This is due to contamination, types and high volume of plastic bottles. To address it, we ideate a smart bin that could identify the cleanliness and type of plastic bottles.
Parts list
| Qty | Product | Part number | |
|---|---|---|---|
| 2 | camera | ||
| 8 | limit switch | ||
| 6 | MG995 servo motors | ||
| 4 | strain guage | ||
| 1 | ultrasonic sensor | ||
| 1 | laser sensor | ||
| 2 | stepper motor | ||
| 1 | LED strip | ||
1. Problems to solve
The current inefficient and wasteful recycling process inspired us to create a smart recycling bin that utilizes advanced technology.
In light of this situation, we found three pain points to the problem: contamination, plastic types, and high volume of plastic bottles. To address them, we decided to solve the problem with the following three main strategies.
2. Three strategies solutions
- To start, we have integrated cutting-edge computer vision technology and strain gauge to detect and reject dirty bottles, which helps to protect the recyclables inside the bin.
- In addition, we have incorporated Near-Infrared (NIR) Spectroscopy to sort plastic bottles based on their plastic types. This technology allows us to optimize transportation efficiency and reduce processing costs.
- Last, but not least, it features a compression mechanism that compresses plastic bottles, making transportation of recyclables more efficient.
3. Operation of "Realcycle": Enhancing Plastic Recycling Efficiency and Purity
Introducing the Plastic Bottle:
When a plastic bottle is placed into the entrance of the "Realcycle" recycling bin, it smoothly slides into the analysis chamber, where the transformative recycling process begins.
Contaminant and Object Detection:
Within the analysis chamber, "RealCycle" employs cutting-edge computer vision technology. This technology allows the machine to meticulously examine the contents of the plastic bottle, identifying potential contaminants such as liquids and non-recyclable materials. Additionally, the system employs strain gauges to measure the weight of the object within the chamber, comparing it to the estimated weight range based on the bottle's volume, ensuring the integrity of the recycling process.
Plastic Type Identification:
Concurrently, "Realcycle" employs Near-Infrared (NIR) technology to identify the plastic type of the bottle. This step is vital for accurate sorting and recycling.
Decision-Making Process:
Based on the comprehensive analysis, Realcycle makes an informed decision about the bottle's recyclability. There are two possible outcomes:
i. Accepted Bottle:
If the plastic bottle is identified as clean and recyclable, the gate on the right-hand side of the machine opens. The bottle is guided to drop between two stainless steel compressing wheels.
The compressing wheels efficiently reduce the bottle's size, optimizing storage space and transportation efficiency. The compressed bottle advances to the sorting gate, a pivotal juncture in the process.
Sorting Process:
The sorting gate directs the plastic bottle into one of two bins within the machine, based on its plastic type. This sorting process ensures accurate separation of Type 1 plastic (PET) from other plastic types, enhancing downstream recycling processes.
ii. Rejected Object:
In cases where the plastic bottle contains contaminants or the object is not a plastic bottle, "Realcycle" promptly rejects the item to maintain recycling purity.
The bottom plate of the analysis chamber returns the rejected object to the user through the entrance, granting the user the opportunity to reclaim the item.
If the user chooses not to retrieve the rejected object, the bottom plate returns to its original position, and the object is prepared for responsible disposal.
In both acceptance and rejection scenarios, RealCycle prioritizes efficiency, recycling integrity, and user engagement, paving the way for a more sustainable future.
4. Solution details
i. Systems Overview
Orchestrating 8 actuators and 19 sensors effectively is not an easy task. With different processes requiring different amounts of computational power, hardware control and speed, we have come up with the following system:
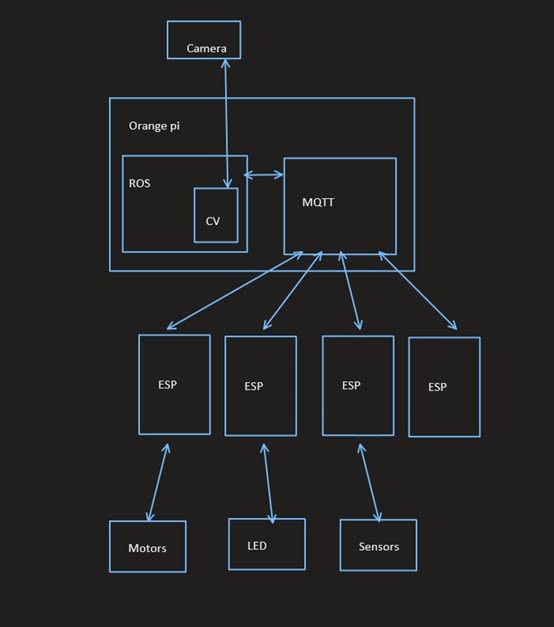
We use ESP32 to control the hardware like motors directly. ESP32s will also upload sensor data to the orange pi (an SBC) through MQTT broker. The ROS installed on the orange pi would host the CV algorithm and make decisions based on all sensor data.
The decision of whether to collect or reject the bottle is then published to the MQTT server (also hosted on the orangepi) and the ESP32s will pull data from the MQTT broker.
ii. Computer Vision
The combination of computer vision (CV) technology and strain gauge sensors can help us quickly identify problematic inputs to the machine, such as dirty bottles and glass bottles.
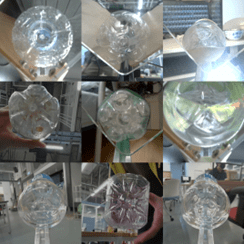
Located at the bottom of the analysis chamber, a camera that streams the video to the first CV algorithm to determine if the bottle contains liquid or not. Each image only takes 0.25 seconds to be processed on an Orange Pi 5.
Whilst the first CV algorithm focuses on checking the cleanliness of the bottle. The second CV algorithm approximates the volume of the bottle. With the volume information, we can derive the expected weight of the bottle. We then use strain gauge sensors to crosscheck if the measured weight exceeds the expected weight. If so, then we know it is either dirty (contains liquid) or it is not plastic, possibly something that is heavier.
We have trained 4 generations of CV models; the last generation uses more than 4000 images for training. Through these iterations, we have improved the accuracy, ability to generalize, inference speed and model size. We have also tested different methods of data sampling and model architecture.
For data sampling, we tried dynamic background sampling, where the background changes in every sample. The idea is that the model will be very good at generalizing and can work in any environment. After comparing the results and considering our deployment environment, we opted for static background sampling as it produces a more stable result (accuracy is more predictable and stable) and is still able to generalize, e.g., bright light shining in from outside of the machine, water splashing on to the bottom acrylic (visible to the camera).

For model architecture, we have tried some well-known architectures such as Google’s Inception V3, VGG-16, VGG-19, and EfficientNet-V3. After testing and learning their speciality, we have developed our own architecture. By combining their strengths such as the ability to generalize, accuracy, resistance to overfitting, inference time, we constructed a model that is very accurate, very lightweight (smallest out of all the tested models) and the fastest (inference time). Below are some of the training logs showing the improvement throughout the experiment.
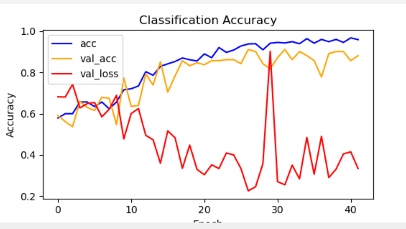
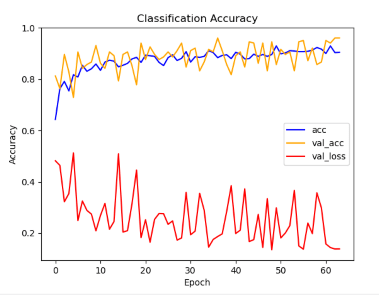
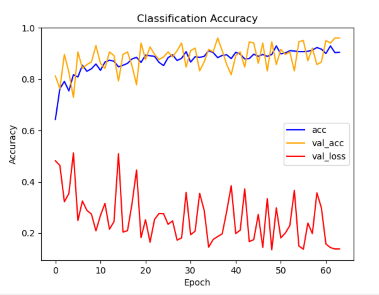
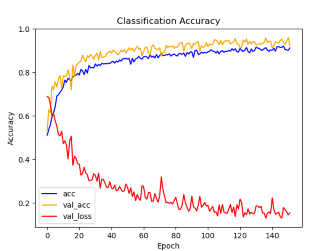
Blue: Accuracy (The higher the better)
Yellow: Validation Accuracy (The higher the better)
Red: Validation loss (The lower the better)
Green: Loss (The lower the better)
iii. Strain Guage
The 3 strain gauges at the bottom of the analysis chamber measure the weight of the input bottle by measuring the deformation of the bottom plate.
Pre-calibration of the strain gauges was done using the HX711 and ESP32 development board. Different bottles were used to cross-check the weight calculated by the HX711 with the actual weight as measured by an electronic balance, adjusting the calibration factor as necessary and to be more precise.
A database was created to record the average weight of bottles of a certain volume, which will be used in combination with computer vision to eliminate overweight or underweight bottles.
iv. NIR Spectroscopy
Since most recycling service providers focus on processing one type of plastic, it is desirable to separate different types of plastic bottles upstream.
Different types of plastic have different infrared spectrums. There are different spectral indices for each type of plastic.
We would like to identify PET and non-PET plastic bottles using infrared spectroscopy. Then, the sorting mechanism knows whether it should sort the incoming bottle into the PET or the non-PET bin.
We will employ 9 near-infrared LEDs emitting different wavelengths and shine on the object under test.
Mode of operation of NIR spectroscopy
Two modes of operation are used, reflectance and transmittance.
In reflectance mode
- Infrared light emitted from frontend A.
- NIR LEDs are driven by BJT transistors.
- Some light rays are reflected by the material.
- Frontend A picks up the reflected light.
- InGaAs photodiode current amplified by AD8606 trans-impedance amplifier
- read by ADC of ESP32
In transmittance mode
- Infrared light emitted from frontend B.
- NIR LEDs are driven by BJT transistors.
- Some light rays pass through the material.
- Frontend A picks up the reflected light.
- InGaAs photodiode current amplified by AD8606 trans-impedance amplifier
- read by ADC of ESP32
Data processing
The data collected from both the reflectance mode and transmittance mode are combined into an array, which is passed on to Principal Component Analysis (PCA). PCA is a technique that maximises the variance of the data while reducing the dimension. It extracts features from the high-dimension data which maximally represent the differences we are looking for.
After extracting the high variance features through PCA, a support vector machine is used as a classifier to draw the boundaries between the points produced by PCA, thus collapsing the coordinates of the points into discrete classes in terms of the type of plastic.
Here is a demonstration of how the DIY near-infrared spectrometer works:
Although RealCycle’s discrete NIR spectrometer is no panacea for sorting plastic types, it serves as a proof of concept that a low-cost and lightweight alternative to the expensive and bulky laboratory counterpart can be implemented.
v. Feedback Systems
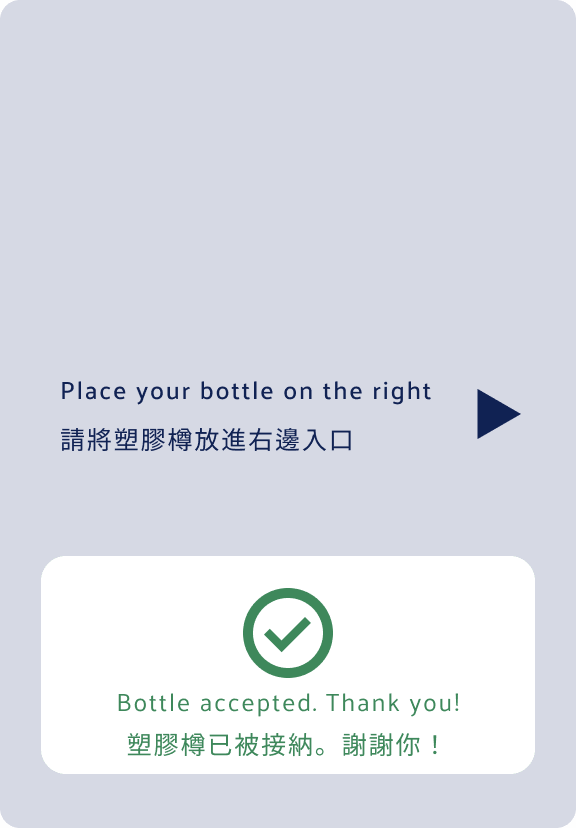
To educate users about the correct recycling methods, our machine provides different feedback for acceptance and rejection on a screen along with an LED.
At first, the default screen reminds users to put the recyclables into the collection hole located on the right side of the screen. At the same time, the ring of LED surrounding the collection hole turns green, indicating that our machine is ready to receive bottles. When a user puts an object into our machine, the LED turns blue to indicate that our machine is processing and asks users to wait for the result.
If the object is accepted, a pop-up message will be shown on the default screen, letting users know they are back in a loop and that the machine is ready to accept a new object. But if the object is rejected, the LED turns red, giving a warning signal to our user to take back the object that does not meet the quality standard.

5. Future Works
The project was originally designed based on the situation in Hong Kong, where multi-stream recycling is predominantly adopted. However, our team hopes to promote our machine to other cities, including those which are using single-stream recycling predominantly. Followed by this, we will strive to create a machine that can collect other quality recyclables as well.
Read more about our project on our website!