HeliosRover – Self-driving Solar Car with Tracking Abilities
Follow project
 Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
 HeliosRover is an innovative educational tool; a self-driving solar car designed to spark interest and impart knowledge in robotics, electrical engineering, and renewable energy among high school learners in underserved areas of Cape Town.
HeliosRover is an innovative educational tool; a self-driving solar car designed to spark interest and impart knowledge in robotics, electrical engineering, and renewable energy among high school learners in underserved areas of Cape Town.
Parts list
| Qty | Product | Part number | |
|---|---|---|---|
| 1 | Steel Chassis | ||
| 4 | Off-road Wheels | ||
| 4 | Anti-shock Vibration Mounts | ||
| 4 | Ball Joints | ||
| 1 | Nvidia Jetson TX2 | ||
| 1 | PCA PWM Board | ||
| 1 | VESC (Vedder Electronic Speed Controller) | ||
| 2 | Brushless DC Motor H5055 200KV 1380W | ||
| 1 | DS Servo 60kg.cm Spline 18T | ||
| 1 | USB IMX179 Camera | ||
| 1 | 4S20P 16.8V 30Ah Lithium-Ion Battery | ||
| 1 | 4S BMS (Battery Management System) | ||
| 2 | 300W 20A Constant Current Adjustable Buck Converter | ||
| 2 | LTC3780 DC-DC Buck Boost Converter | ||
| 1 | 80W Solar Panel | ||
| 1 | Arduino Uno | A000066 | |
| 1 | CNC Shield | ||
| 4 | DRV8825 Stepper Motor Driver | ||
| 4 | 42BYGH48 1.2A Stepper Motor | ||
| 2 | Light-Dependent Resistor (LDR) | ||
| 2 | Rubber Drive Belt | ||
| 1 | Vodafone Wifi Router | ||
HeliosRover is named after the Greek Sun God, “Helios,” symbolizing its solar tracker abilities and “Rover” represents its autonomous and rugged capability, this project features an advanced power management system, robust mechanical design, lane detection and following using machine learning and computer vision. It also features a renewable energy hub through its onboard solar panel and dynamic solar tracker system. These subsystems work in harmony as HeliosRover is a system integration project with strong educational objectives. The car has a long history of STEM outreach and has already inspired many underprivileged high school learners to study engineering.
Background - The Challenge:
I grew up with consistent exposure to cutting-edge technology which ignited my passion for problem-solving and increased my interest in engineering and robotics. It became evident that the exposure to such technologies had a profound influence on my educational and career choices, leading me to study mechatronics engineering at university.
In Cape Town, South Africa, significant disparities in knowledge and educational resources exist, with less privileged areas grappling with limited access to technology and educational exposure. HeliosRover is conceived to bridge this educational divide and foster interest in electrical engineering at the high school level, empowering learners to pursue careers in engineering and contribute solutions to the challenges faced by their communities.
Before the inception of HeliosRover, a smaller-scale solar car was developed to serve as my first educational tool, focusing on solar energy and basic autonomous functionalities. This solar car used distance sensors for self-navigation compared to HeliosRover's advanced AI and computer vision, and it also featured solar tracking abilities. Although more rudimentary, this car served its purpose in outreach programs, illustrating the potential of renewable energy and autonomous technologies to learners, and fostering an interest in STEM fields.

Figure 1: My first small-scale solar car
This initial project was impactful, creating a positive ripple effect among the learners it reached. However, it was clear that there was a need for an upgraded, more technically advanced version that could not only enhance educational outcomes but also be more engaging and inspiring. This need led to the evolution and creation of HeliosRover.
Approach - Rapid Prototyping:
HeliosRover’s developmental journey involved meticulous, phased rapid prototyping, with each phase refining specific subsystems before integration into the final product, coupled with interactive outreach at each stage to foster learning and inspiration.
First Phase: Basic Mobility & Initial Outreach
In the initial phase, the focus was on constructing basic mobility and steering mechanics, involving the assembly of the chassis, steering servo motor, and rear drive system. This transformed HeliosRover into a rudimentary, remotely controlled car. This version of HeliosRover was first introduced during a robotics programme, where it effectively demonstrated the fundamental principles of mobility and steering to the learners. This interactive exposure served as an early beacon of the possibilities within engineering, creating a tangible, hands-on learning experience and sparking interest and curiosity among the students.

Figure 2: High School learners interacting with HeliosRover during a robotics programme
Second Phase: Advanced Technologies Integration
The next phase marked the integration of advanced technologies like the Nvidia Jetson TX2 and an onboard camera system. This upgrade enabled digital remote control driving and initiated the development of self-driving functionalities. During this stage, extensive data collection and testing were conducted for autonomous road lane detection and following.

Figure 3: HeliosRover with the camera and Nvidia Jetson integration
Third Phase: Solar Tracker Integration
The final development phase involved the modular integration of the solar tracker system, enabling its easy addition or removal based on specific requirements. The solar tracker's mechanical system was first developed on a wooden base system to test and optimize the mounting systems and dynamics. The solar tracker system was then added and tested on the car's chassis.
Figure 4: HeliosRover with its solar tracker system

HeliosRover Mechanical Design:
The mechanical blueprint of HeliosRover was designed using SolidWorks CAD drawings which can be seen below. The chassis, measuring 1m by 0.5m, is a meticulously welded structure of hollow steel bars, coated with rust-resistant metallic paint, serving as the robust foundation supporting the various hardware components of the car.
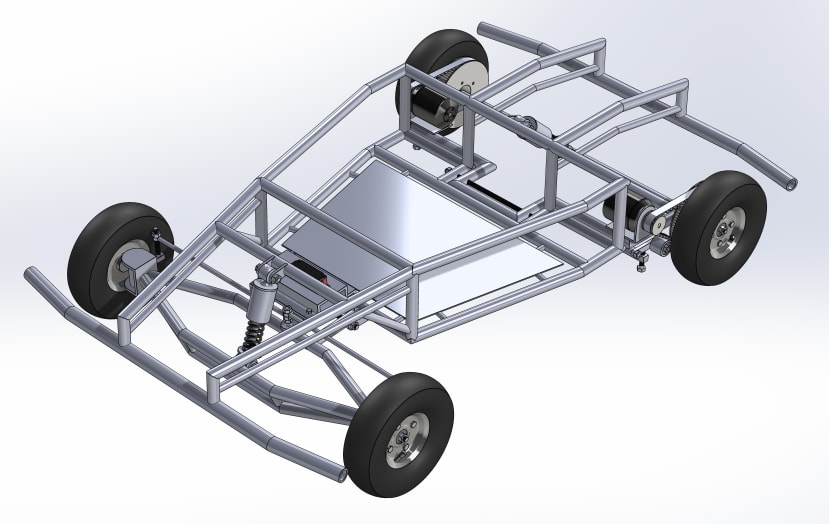
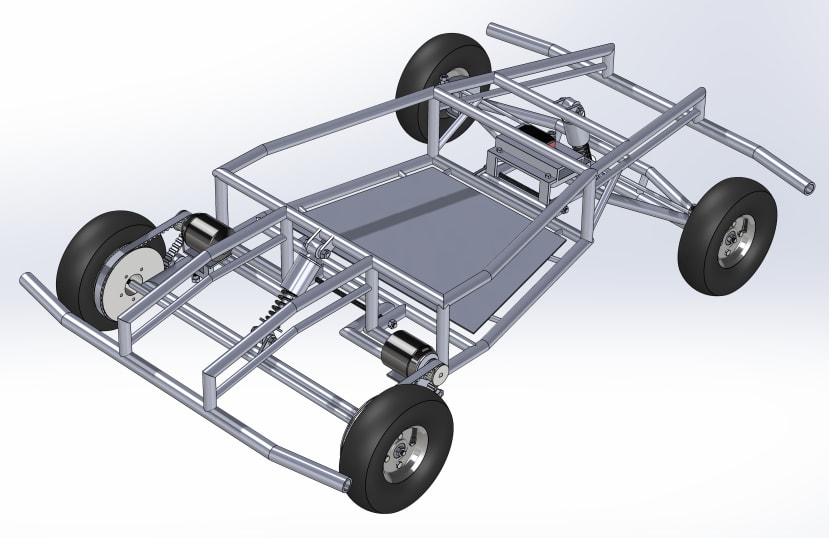
Figure 5: HeliosRover SolidWorks Isometric Views
An advanced suspension system is integrated, connecting the front and rear to the main platform through a well-calibrated shock and pivot mechanism, providing vibrational isolation for the electrical components housed within. Additionally, the innovative steering system, incorporating a spline extending from the servo motor, enables precise navigational adjustments, while the 3D-printed geared drive mechanism ensures efficient all-terrain navigation.
HeliosRover AI Self-driving:
HeliosRover's AI-driven autonomy is a harmonious blend of advanced hardware and sophisticated software, visually demonstrated in the accompanying video. The brain of the operation, an Nvidia Jetson TX2, orchestrates the seamless interaction between the onboard 150-degree FOV USB IMX179 camera and the PCA board, controlling the VESC for the two rear brushless DC motors and the steering servo motor. The collected visual data is processed in real-time, utilizing a convolutional neural network (CNN) implemented through TensorFlow, refined by transfer learning based on Donkey Car's pre-trained model and extensive custom data collection. This robust AI model is capable of accurate lane detection and optimal manoeuvring, making autonomous navigation both precise and reliable. The entire system is designed with transparency and educational enrichment in mind, ensuring each component and software element is accessible and understandable, serving as a real-world example of AI's capabilities in autonomous mobility.
HeliosRover Solar Tracker:
The HeliosRover's Solar Tracker is a dynamic combination of mechanical design, precise control hardware, and intelligent software, illustrated vividly in the included calibration and indoor tracking test video. Mechanically, the tracker features four linear actuators, connected via ball joints to the solar panel and car's chassis, allowing optimal positioning to maximize solar energy absorption. An Arduino Uno, coupled with a CNC shield and four DRV8825 Stepper Motor Drivers, forms the control unit, enabling meticulous movement and adjustment of the solar panel based on the inputs from two LDRs positioned on either side of the panel. The software is a bespoke code ensuring real-time response to the light differences detected, accurately aligning the panel to the most abundant light source available.
Helios Rover STEM Outreach:
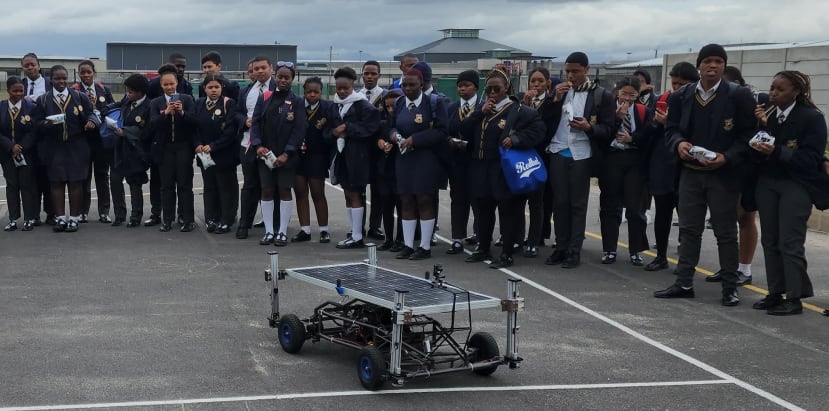
Figure 6: High School learners interacting with HeliosRover During an outreach event in 2023
HeliosRover’s latest outreach event in 2023 stands as a testament to its educational prowess, with vivid glimpses into the interactions captured in the included photos and a video featuring a learner expertly navigating the car via remote control. The event was marked by a symphony of excitement and curiosity among the learners, who, through hands-on demos, discovered the marvels of engineering, renewable energy, and autonomous mobility. The car’s open and modular design facilitated interactive learning, allowing students to observe and understand the intricate workings of each component, kindling their interest in STEM fields.
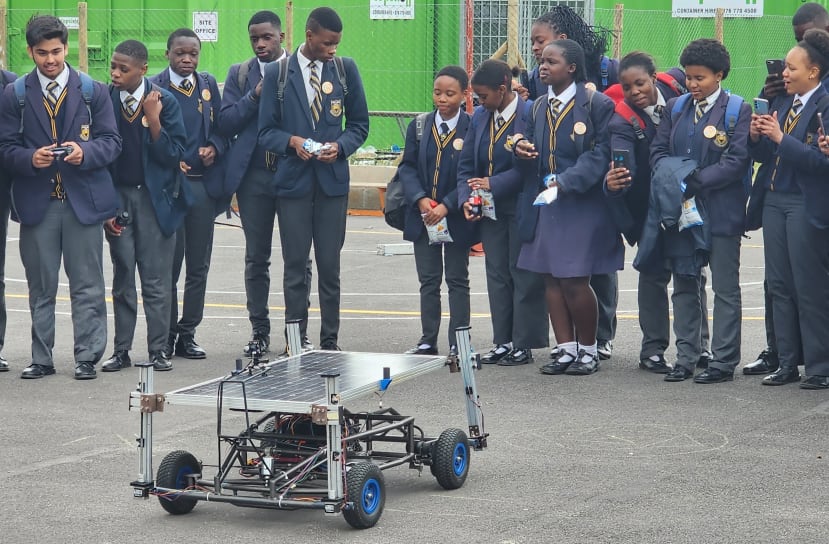
Figure 7: High School learners interacting with HeliosRover During an outreach event in 2023
The reactions from the learners were overwhelmingly positive, with many expressing a newfound interest in electrical engineering and a deeper understanding of sustainable technologies. The experience was not just about transmitting knowledge but also about igniting passions and planting seeds of curiosity and wonder in young minds. The interactions and reactions witnessed during the event underscored the transformative educational potential of HeliosRover, showcasing its capability to inspire and educate the next generation of engineers and scientists.
Conclusion
HeliosRover, through its intricate blend of technology and educational insight, has not only bridged knowledge gaps but also sparked interests and fueled passions in the realm of engineering and renewable energy among learners. It represents a beacon of hope and a catalyst for change in educational paradigms, preparing young minds for a future where technology and sustainability intertwine. The journey of HeliosRover symbolizes the power of innovation to educate, inspire, and drive positive societal change, hinting at a future where learning is interactive, inclusive, and profound.