Votre nouveau compagnon de travail, un Cobot
Suivez l'article
 Dave from DesignSpark
Dave from DesignSpark
Que pensez-vous de cet article ? Aidez-nous à vous fournir un meilleur contenu.
Dave from DesignSpark
Merci! Vos commentaires ont été reçus.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
Que pensez-vous de cet article ?
Les robots industriels sont massifs, onéreux, rigides et dangereux pour les travailleurs humains, n'est-ce pas ? C'est faux : la future génération de robots collaboratifs, ou Cobots, sera en mesure d'intervenir aux côtés des humains et n'aura plus besoin de cages ou de barrières
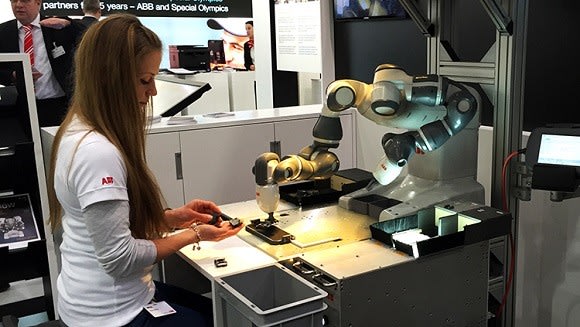
Crédit photo : ABB
Le robot en cage
Le développement des Cobots a fait migrer les robots du domaine de la science-fiction vers la réalité pratique. Jusque récemment, la machine humanoïde puissante et intelligente qui travaille avec les humains n'existait que dans les œuvres de fiction. Les premiers bras robotisés étaient relativement peu sophistiqués, équipés de simples capteurs qui renvoyaient des informations sur la position des articulations à l'ordinateur de contrôle. Des "capteurs de sécurité" sous forme de capteurs de fin de course servaient uniquement à empêcher le bras de s'endommager en cas de mouvement hors de portée exécuté par le contrôleur. Ils sont massifs, boulonnés au sol et manipulent souvent de lourds outils de soudure, très rapidement et avec dextérité. Il est difficile d'imaginer quoi que ce soit de moins engageant et collaboratif, les humains en sont donc tenus à distance, séparés du bras par des barrières lorsque celui-ci fonctionne. Ces machines assez impressionnantes ont caractérisé les usines d'assemblage à grande échelle des années 1980, mais leur prix élevé et leur manque de flexibilité les rendaient inaccessibles au plus grand nombre des entreprises. Par conséquent, comment lever les barrières et transformer un monstre en un cobot inoffensif et flexible ?
Lever les barrières mais réagir à la proximité excessive
Un simple détecteur IRP peut servir à détecter l'approche excessive d'une personne et désactiver le robot. On appelle cela un arrêt surveillé de sécurité, un dispositif facile à mettre en place, mais très perturbateur étant donné que la généreuse marge de sécurité entraînerait inévitablement de fréquentes désactivations. Les usines paraissent peut-être moins intimidantes sans ces fameuses cages, mais ce changement s'avère financièrement illogique si les ouvriers ont toujours besoin d'accéder à la zone.
Une meilleure méthode consiste à utiliser des capteurs de portée à ultrasons (sonar) ou infrarouge (lidar) autour du robot pour parvenir à une solution plus mesurée. Une zone de désactivation plus réduite autour du robot est désormais entourée d'une zone dite de ralentissement. Ceci garantit que toute personne qui entre dans la marge de sécurité réduit la vitesse de la machine et l'immobilise uniquement si la personne continue son approche. Ce faisant, elle devra naturellement ignorer les sons et voyants d'avertissement. Cette technique est connue sous le nom de la surveillance par vitesse et séparation. Un Cobot basé sur SSM pour l'exécution sécurisée fait l'objet d'une démonstration dans cette vidéo :
Notez que la "collaboration" consiste à alterner des actions humaines avec des mouvements du robot : le robot ne bougera pas tant que la personne restera dans sa zone. Cette méthode d'exploitation est très efficace pour de nombreuses tâches, mais à cause de la "cage virtuelle", déplacer le robot vers un autre emplacement implique de le déboulonner de l'établi avec le système de capteurs. Il vous faudra à nouveau boulonner et aligner les deux dispositifs sur le nouvel emplacement. Pour une flexibilité maximale sur le lieu de travail, un Cobot ne devrait pas nécessiter de système de capteurs, compte tenu des efforts à fournir et du réalignement à effectuer. Il est possible d'adapter la sécurité SSM sur un bras robotique d'ancienne génération et au moins une entreprise travaille actuellement à un système de vision destiné à transformer un ancien robot en cobot.
Lever la restriction "Ne pas toucher"
Le terme collaboration implique effectivement que robots et humains doivent s'approcher suffisamment l'un de l'autre pour interagir, et chacun doit être sûr que l'autre ne lui fera pas de "mal". Dans l'environnement collaboratif, le contact physique entre humain et machine peut s'avérer inévitable et même désirable, car il permet au robot d'apprendre par l'expérience. Une méthode évidente pour réduire les hématomes et les ruptures serait de fabriquer le bras robotisé et son effecteur terminal (pince) en matériaux tendres et souples. De nombreuses recherches ont été effectuées sur la "soft robotics", divisées en deux domaines : des robots complets fabriqués à partir d'un matériau souple, tels que les robots serpents, et les actionneurs/pinces en mesure de saisir des objets de formes inhabituelles ou fragiles. Pour la plupart des applications en atelier ou en usine, les robots flexibles n'offrent pas assez de précision de mouvement ou de saisie. Il devient alors nécessaire de trouver d'autres moyens d'assurer la sécurité et le confort du collègue humain.
Le robot collaboratif
Jusqu'à présent, nous avons établi deux caractéristiques essentielles qui font d'un robot un Cobot : il doit exécuter une tâche avec un degré raisonnable de précision et de répétabilité et, ce faisant, détecter et réagir de manière sécurisée aux intrusions imprévues dans son enveloppe d'opération. À cela peuvent s'ajouter des capacités très recherchées : facilité de programmation par une personne non experte, de déplacement à différents endroits et de repositionnement pour de nouvelles tâches et enfin, de contrôle par limitation de force pour éviter de s'endommager lui-même et la pièce travaillée. La prochaine vidéo illustre ce que l'on pourrait appeler un assistant robot "de bureau" qui remplit ces critères et mérite le terme Cobot :
Le YuMi n'est pas unique, mais il illustre bien la pensée actuelle derrière la conception de cobots. Visuellement, les nouveaux cobots ne ressemblent absolument pas aux bras robotisés pour établi employés dans le passé.
- Les articulations sont conçues pour éliminer les points de pincement susceptibles d'écraser une main humaine.
- Les composants de bras sont espacés les uns des autres, afin d'éviter qu'un membre humain se retrouve pris en ciseaux entre deux de ces bras.
- Les bras sont lisses : tous les engrenages, axes et câbles sont complètement enfermés dans un châssis sans aspérité, arrondi et matelassé, sans danger pour les coudes.
- La vitesse de mouvement est limitée pour des raisons de compatibilité avec les temps de réaction humains. Ceci s'applique uniquement si la détection de contact est disponible lorsqu'humains et cobots opèrent dans le même espace.
- YuMi est également en mesure de détecter le contact, ce qui lui permet de forcer l'arrêt si le bras rencontre un obstacle.
Systèmes de vision
Si vous parcourez les nombreuses vidéos du fabricant sur ses produits pour robots collaboratifs, vous avez peut-être remarqué que a) la "collaboration" n'est pas tellement mise en évidence et que b) les tâches se résument pour la plupart à déplacer un objet d'un emplacement spécifique à l'autre. Ma conception d'un cobot utile consiste à pouvoir effectuer la même tâche qu'une infirmière de bloc opératoire d'un hôpital, à savoir tendre les instruments au chirurgien à sa demande ou, plus vraisemblablement, le faire sans que le chirurgien les demande selon l'entraînement et l'expérience. Afin d'atteindre cet objectif, ce cobot a besoin d'yeux et d'être en mesure d'interpréter ce qu'il voit. Les cobots tels que YuMi et Sawyer de Rethink Robotics disposent de caméras et peuvent être entraînés à reconnaître des objets. Le niveau de sophistication n'est pas très élevé, mais cela signifie que les objets nécessitant un déplacement (Pick'n'Place) n'ont pas besoin d'un positionnement très précis au point de saisie et que le robot peut ajuster avec finesse le point de dépose en observant les points de référence cible. Regardez Sawyer utiliser son Robot système de positionnement avec repères dans cette vidéo :
Comme vous pouvez le voir, il peut se verrouiller sur un plateau de composants dans un mode d'apprentissage, mais si le plateau est accidentellement déplacé, il est incapable de se réaligner sans intervention manuelle. Mon assistant robot idéal devrait reconnaître des outils disposés au hasard sur un établi, les saisir et les "passer" avec la bonne orientation, sans me transpercer en cours de route, un défi de taille. Heureusement, la reconnaissance et les systèmes de suivi des objets ont récemment connu des améliorations notables de performances, tout le mérite revenant au développement continu de véhicules autonomes ; attendez-vous donc à croiser de plus en plus de cobots dans un avenir proche.
Apprentissage contre programmation
Il existe trois méthodes d'entraînement principales pour amener un robot à effectuer une séquence de mouvements particulière : via pupitre, par guidage manuel et la programmation. La méthode par pupitre s'applique uniquement aux robots massifs en cage dont un opérateur utilise le boîtier de commande situé en dehors des barrières pour contrôler le robot manuellement tout au long de sa routine, afin qu'il enregistre la séquence dans sa mémoire. L'opérateur humain "enseigne" à la machine ce qu'elle doit faire..
La méthode par guidage manuel repose sur le même principe d'enseignement que la méthode via pupitre, à la différence que cette méthode s'effectue réellement à la main. Le cobot est placé en mode apprentissage dans lequel ses moteurs sont désactivés ou leur alimentation réduite à un niveau qui leur permet de garder une position, puis le bras est déplacé à la main tout au long de la séquence voulue. Les capteurs de mouvement situé sur chaque axe de servomoteur, destinés à fournir un fin contrôle de boucle en fonctionnement normal, enregistrent à la place les actions pour pouvoir les "rejouer" ultérieurement. Regardez cette démonstration vidéo réalisée lors d'un salon :
De nombreux robots sont toujours programmés avec un code généré hors ligne sur un ordinateur. Forth est un langage développé voilà de nombreuses années, précisément pour s'appliquer au contrôle de robots en temps réel. Sa capacité à produire à grande vitesse du code compact et rapide justifie qu'il soit toujours utilisé de nos jours : les bras robots industriels ST Robotics séries R sont par exemple programmés en RoboForth. Les hackers modernes ont eux aussi découvert ses charmes. Même les sondes spatiales comme la chasseuse de comète Rosetta et son atterrisseur Philae ont été programmés en Forth. Je parle beaucoup de Forth à cause d'un intérêt personnel : je travaille sur une version pour applications intégrées basée sur le microcontrôleur Microchip dsPIC. FORTHdsPIC a fait l'objet de plusieurs contributions sur le blog DesignSpark au cours des dernières années ! L'inconvénient de la programmation réside dans les besoins en temps et en personnels qualifiés pour créer ou modifier le code chaque fois que le cobot doit être redéployé. C'est précisément ce qui décourage les petites entreprises d'en acquérir un. Pour le moment, le guidage manuel semble être le premier choix en matière de méthode d'apprentissage.
À l'avenir, il est probable que l'intelligence artificielle devienne une caractéristique dominante du contrôle robotique. En d'autres termes, les robots, en particulier les cobots, apprendront par eux-mêmes comment atteindre un objectif spécifique. Ce concept a récemment engendré des débats houleux selon lesquels " les robots vont remplacer les travailleurs humains". Nous sommes aussi loin des voitures totalement autonomes sans conducteurs que des robots dotés de compétences humaines, aussi basiques soient-elles. Mon assistant robot ne se présentera pas à mon établi de sitôt ; en tout cas, pas avant de m'avoir convaincu qu'il ne confondra pas ma main avec la pièce travaillée et l'attaquer à la clé à douille.
Travail en cours
De nombreuses procédures de recherche et de développement sont en cours pour atteindre l'objectif du cobot idéal. Voici une sélection des récentes publications sur ce sujet.
Apprendre des objectifs robotiques à partir de l'interaction humaine physique. Cette idée va plus loin sur le plan du guidage manuel : si le cobot effectue un mouvement incorrect pendant son fonctionnement, l'opérateur humain est en mesure de le corriger immédiatement d'un geste physique. Ainsi, le robot "apprendra de ses erreurs".
Tissus cutanés lisses personnalisés pour capteurs de pince robotique pour une visualisation haptique des objets. Les chercheurs sont en train de développer un système de capteurs tactiles pour les "doigts" des pinces. Ce retour sensoriel permet au robot de se créer une visualisation 3D de l'objet qu'il saisit.
Dex-Net 2.0 : apprentissage approfondi pour la planification de saisies robustes avec nuages de points synthétiques et mesures analytiques des saisies. Cette publication s'attaque au problème de l'identification des objets dans l'objectif de sélectionner l'action de saisie optimale. Un système de vision utilise un réseau neuronal convolutif avec une base de données d'images pour reconnaître les objets quelle que soit leur orientation.
Normes/spécifications internationales : ISO 10218 and ISO/TS 15066
Passons maintenant aux aspects plus terre à terre. Factuellement, si vous souhaitez créer un cobot ou en ajouter un à votre personnel, celui-ci doit respecter les normes de sécurité internationales suivantes. ISO 10218 était écrite pour les robots massifs en cage du passé, mais elle contient tout de même déjà des références générales à la sécurité qui s'appliquent aussi à la nouvelle génération de cobots. La version ISO/TS 15066, plus récente, est une tentative de spécification destinée aux cobots. Par exemple, la spécification indique que : si le contact entre robots et humains est possible et qu'un contact accidentel se produit effectivement, ce contact ne doit générer ni douleur ni blessure. Les niveaux de douleur tolérés par les différentes parties du corps humain au contact avec un cobot ont fait l'objet de recherches et sont fournis dans cette spécification. Je ne parviens pas à me représenter comment les auteurs ont obtenu ces chiffres. L'ensemble s'appelle "données de niveau de survenue de la douleur" et doit être pris en compte dans toute conception. Bienvenu dans le monde des robots sans cage !
Enfin :
Nous sommes encore loin de l'assistant robot de style C-3PO et malgré tous les débats sur la collaboration, La plupart des cobots de la génération actuelle semblent passer leur vie privés de compagnie humaine, simplement à déplacer des choses d'un endroit à un autre. Cependant, leurs différents styles visuels les distinguent les uns des autres : nombre d'entre eux affichent des bras humanoïdes assez "musculeux", mais j'ai une préférence pour Sawyer, son air d'assemblage de plomberie animée et ses yeux clignotants qui pourraient bien refléter de l'intelligence à l'avenir.
Si vous avez des questions sur des aspects pratiques, suivez mes messages sur Twitter. Je mets des liens vers des articles intéressants sur l'électronique et les nouvelles technologies, je retweete des publications que j'ai repérées sur les robots, l'exploration spatiale et d'autres sujets..