Wireless Power Transfer for Underwater Vehicles
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Introduction
Space the final frontier, or is it? It is often said we know more about the moon’s surface than the depths of our oceans [1]. Extraordinary, considering that we have only visited the moon on six occasions, yet there have been countless exploratory missions in our oceans. The main reason for the difficulty in exploring underwater environments is charging underwater vehicles (UVs) as they are range limited by battery storage [2]. Which impedes the use of UVs as the charging process is cumbersome and often costly.
The most common charging techniques employed by UVs include battery swapping, illustrated in Fig. 1, and conductive charging [3].

Battery swapping involves replacing the depleted battery in the UV with a fully charged battery. This process has the advantage of not needing to wait for the battery to charge. However, the UV still needs to be removed from the ocean. This requires expensive machinery such as a crane and a large support vessel to lift the vehicle from the water as illustrated in Fig. 2. Further increasing the cost, duration and number of crew members required for research missions.
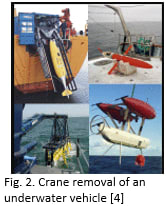

Fig. 3. Indicates the wet mate base station in the centre and the cables running to the UV on the right.
These two charging methods result in underwater exploratory missions that require multiple people to be onboard a ship in potentially hazardous environments to remove the UV from the ocean to charge it. Highlighting the need to introduce wireless charging.
Wireless Charging
Wireless charging is the transfer of power through a gap, with no electrical connection, to electrical devices for the purpose of replenishment [7]. There are two main types of wireless power transfer, radiative and coupling [8]. Radiative power transfer consists of power transfer through lasers and microwaves. Whereas the coupling type makes use of electric and magnetic fields to transfer power.
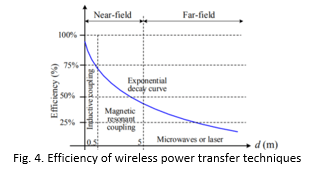
Radiative power transfer is used to transmit power over distances far bigger than the coil dimensions whereas the coupling type of power transfer is over smaller distances [9]. Therefore, radiative power transfer techniques have a much lower efficiency than coupling-type techniques shown in Fig. 4 [10]. Resulting from the large operating distance of a radiative power transfer system. Radiative power transfer systems also operate at a much higher frequency than coupling-type power transfer systems. Therefore, this results in higher attenuation of microwaves and lasers in saltwater, further decreasing the efficiency, since attenuation is directly proportional to frequency in seawater [5].
Coupling-type power transfer systems that use magnetic and electric fields are called inductive and capacitive power transfer systems. In particular, inductive wireless power transfer (IWPT) systems are the most popular wireless power transfer systems today [11].
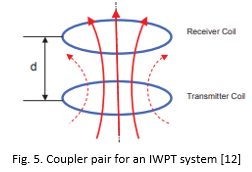
As indicated in Fig. 4. IWPT systems have some of the highest efficiencies for wireless power transfer systems. An IWPT consists of a receiver coil and a transmitter coil linked by magnetic flux. Power is transferred through the principle of magnetic induction in the receiver coil. Therefore, IWPT systems lower the risk of electrocution as they ensure galvanic isolation between the transmitter and receiver.
Due to the efficiency, safety and flexibility of design, as coils can be formed into any shape, an IWPT was chosen to charge UVs.
Project Description
This project involves implementing a feasible and efficient underwater wireless charging system for UVs. The main focus of the research is on the magnetic coupler. The system enables UVs to remain underwater while charging, eliminating the requirement of expensive machinery and allowing researchers to deploy the UV and not need a large crew present aboard a ship to charge the UV.
The wireless charging system comprises of three main subsystems:
- The base station.
- The transmitter coil.
- The receiver coil.
The base station will allow for easy docking of the UV by hanging below the surface of the ocean. An underwater base station removes the need to take the UV out of the water. Therefore, saving time and resources. The base station also improves efficiency by consisting of materials with low magnetic permeability such as ferrite. Ferrite guides the magnetic flux of the inductive coupler, therefore reducing eddy current losses in seawater. In addition to using ferrite, the base station will be covered in neoprene, which is a durable synthetic rubber, used in swimsuits. This will add an additional level of insulation for the ferrite and magnetic coupler.
The transmitter and receiver coils make up the magnetic coupler. The magnetic coupler needs to minimise leakage flux to reduce eddy current loss to seawater. By controlling the leakage flux the coupler will not damage any sensitive sensors on the UV. Also, the coupler needs to reduce the amount of space it takes up. The transmitter and receiver should be optimised to work in non-ideal conditions where misalignments between the coils are present.
Conclusion
Wireless power provides an opportunity to improve the viability of UVs. This is accomplished by submerged UV charging. Additionally, the proposed charging system will reduce the cost of underwater research missions using UVs because the charging process is streamlined. The streamlined charging process means that less crew members are required and expensive ships do not need to be in constant proximity of the UV while it is in operation. The project progress thus far seems promising and I look forward to sharing progress as I complete the project.
Bibliography
[1] P. A. Tyler, Ecosystems of the Deep Oceans, Amsterdam: Elsevier, 2003.
[2] C. R. Teeneti, T. T. Truscott, D. N. Beal and P. Zeljko, "Review of Wireless Charging Systems for Autonomous Underwater Vehicles," IEEE Journal of Oceanic Engineering , vol. 46, no. 1, pp. 68-87, 2019.
[3] A. Mostafa, Y. Wang, H. Zhang, S. Tangirala and F. Lu, "An Ultra-Fast Wireless Charging System with a Hull-Compatible Coil Structure for Autonomous Underwater Vehicles (AUVs)," in 2022 IEEE Transportation Electrification Conference & Expo (ITEC), Anaheim, 2022.
[4] J. Bellingham, Platforms: Autonomous Underwater Vehicles, Academic Press, 2009, pp. 473-484.
[5] K.-H. Zhang, Z.-B. Zhu, L.-N. Du and B.-W. Song, "Eddy Loss Analysis and Parameter Optimization of," Journal of Power Electronics, vol. 18, no. 3, pp. 778-788, 2018.
[6] J. Flynn and H. Painter, "Current and Future Wet-Mate Connector Technology Developments for Scientific Seabed Observatory Applications," in OCEANS 2006, Boston, 2006.
[7] X. Lu, P. Wang, D. Niyato, D. I. Kim and Z. Han, "Wireless Charging Technologies: Fundamentals, Standards, and Network Applications," IEEE Communications Surveys & Tutorials, vol. 18, no. 2, pp. 1413-1452, 2015.
[8] T. Imura, Wireless Power Transfer Using Magnetic and Electric Coupling Resonance Techniques, Noda: Springer, 2020.
[9] S. Y. R. Hui, W. Zhong and C. K. Lee, "A Critical Review of Recent Progress in Mid-Range Wireless Power Transfer," IEEE Transactions on Power Electronics, vol. 29, no. 9, pp. 4500-4511, 2013.
[10] S. A. H. Mohsan, M. A. Khan, L. S. Rokia, A. Islam, A. Mahmood, A. Mazinani and H. Amjad, "A Review on Research Challenges, Limitations and," International Journal of Advanced Computer Science and Applications, vol. 11, no. 8, pp. 554-562, 2020.
[11] Z. Zhang, H. Pang, A. Georgiadis and C. Cecati, "Wireless Power Transfer—An Overview," IEEE Transactions on Industrial Electronics, vol. 66, no. 2, pp. 1044-1058, 2018.