【转载】造一个可控的瓦力Wall-E的机器人
关注文章 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
原作者:dinochen1983
转载自:http://mc.dfrobot.com.cn/thread-269897-1-1.html
这周挑战我们就造一个WALLE吧
这一次做一个可以采用红外遥控走动的机器人,
参考迪士尼的机器人瓦力(Wall-E)进行设计,如图所示。


WALLE机器人是DINO-ROBOT系列中采用Arduino板进行控制,
采用ARDUINO控制电路的机器人。
这次还是与以前一样简单粗暴,
不过这次采用了一个小的ARDUINO板及2个小黄机去控制运动的轮子(轮子也是3D打印)。
与以往的风格一样,这个装置用到arduino电子析以及L293N电机控制板、会基本电路就可以安装了。材料如下:
(1) 4个 1.5V的电池与电池盒,用来给舵机供电
(2)1个9V的电池给ARDUINO供电
(3) 1个ARDUINO MINI 板,需要很小的尺寸要装在盒子内
(4 )2个小黄电机
(5) 电焊铁,电线及热融胶枪
(6) 小型开关2个,一个用来打开ARDUINO板,
一个用来打开舵机电池
(7) 电线若干。其它就是用3D打印机打印。
(8) 一个L293N电机控制板。
(9) 一个红外线接收头
(10) 一个红外的小遥控器。

材料就是相对多一点,经过训练的小学生都能做这个小型装置。
注意,由于只采用2个电机,没有复杂电路。
第1步,在3DSMAX设计出可爱的WALL-E机器人外型。其实机器人分两个部分,可以走动
的方形盒子身子(包括轮子),以及只是装饰作用的头部及手组成。如下图所示

最后电子电路图如下图所示。

第2步,在3DSMAX将不同颜色不同部分的组件分别排版,为了第三步的打印。
分开不同的颜色
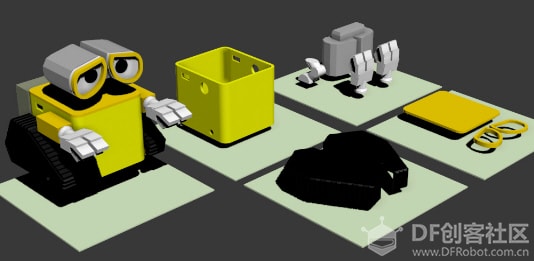

第3步,对构件进行粘合,采用热融胶枪连接部件,如下图所示。

活动的电机用热融胶固定在身体的盒子内,电池盒是机器人的背包,9V电池与ARDUINO板放在盒子内部。全部采用热融胶后如下图所示。头部与盖子相接,轮子外面有一个像坦克履带的盒子保护。

第5步,对ARDUINO板写入代码,这个代码就是就是ARDUINO板舵机简单代码,如下图所示。
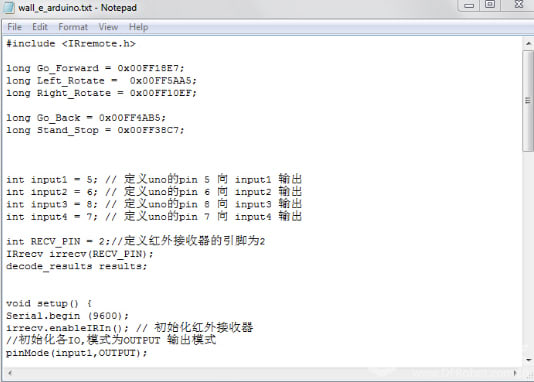
【点击下载你需要的arduino代码文件】

点击下载此文件wall_e_arduino.rar.rar (687 Bytes, 下载次数: 15)
第6步, 测试装置,打开开关,它就开始待命了,然后按一下上(2)下(8)左(4)右(6)中(5),分别控制它前进、后退、左转,右转及停下来,它就是不断的呆萌的走来走去了。