VLAD - A Sample Collection CanSat for the Mach-21 Competition
Follow project Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
 This project details the creation of a CanSat for the Mach-21 Competition, by the Imperial College London Rocketry Team.
This project details the creation of a CanSat for the Mach-21 Competition, by the Imperial College London Rocketry Team.
Parts list
| Qty | Product | Part number | |
|---|---|---|---|
| 1 | 3mm Diameter Plain Steel Parallel Dowel Pin 24mm | 270-574 | |
| 3 | RS PRO Steel1 Module Worm Gear, 1 Start , 18mm Diam , 32mm Long , 16mm Pitch Diam. | 521-6890 | |
| 1 | Parallax Inc Servo Servo Motor, 4 → 6 V, 27 Ncm, 50 rpm | 781-3046 | |
| 1 | RF Solutions, LoRa Module Transceiver 868MHz, -148dBm Receiver Sensitivity | 125-1259 | |
| 1 | pico Technology 2204A PC Based Oscilloscope, 10MHz, 2 Channels | 793-3654 | |
| 5 | RS PRO Zinc Plated Steel Threaded Bar, M5, 1m | 530-315 | |
| 25 | RS PRO 8MHz Crystal ±30ppm 2-Pin 11.35 x 5 x 3.5mm | 144-1055 | |
| 1 | Keil Tungsten Titanium Carbide Tip Twist Drill Bit, 6mm x 100 mm | 569-916 | |
| 1 | RS PRO, M6 Countersunk Head, 12mm Steel Pozidriv Bright Zinc Plated | 553-504 | |
| 2 | Microchip ATMEGA32U4-AUR, 8bit AVR Microcontroller, ATmega, 16MHz, 32 kB Flash, 44-Pin TQFP | 177-2992 | |
There are many ingredients to a good sauce. Garlic, salt, and of course tomatoes. These tomatoes can usually be found in a can, and you may not think of it as much. After all, what could you possibly fit into that volume? Turns out, quite a lot.
Turns out, you can even go as far as fitting a complete set of electronics, a retractable spike mechanism, and a landing gear mechanism capable of self-righting the entire thing. All this, to make a “CanSat” capable of sample collection and storage after being launched several hundred meters in the air by a rocket. However, I'm jumping ahead of myself; let me introduce our team.
Imperial College London Rocketry (ICL Rocketry) is a student rocketry team at (you guessed it) Imperial College London. With over 80 active members, we undertake many projects, ranging from the design of a throttleable hybrid engine to rockets designed to break altitude records.
After catching wind of the Mach-21 CanSat competition in Scotland this summer, we in the Electronics & Payload team knew we had to make one and compete. It was the perfect chance to expand the team's expertise by throwing ourselves into a project that would force us to learn many new skills.
Something unusual was that the competition rules are very open. In the category we chose, we could put any novel idea or concept inside it, as long as it satisfied the safety, volume and mass requirements. That is a lot of freedom.
After a lot of brainstorming, we had the idea of testing out something we had never made before; a deployable payload. deployable payloads separate from a rocket at its apogee, landing separately and performing a task along the way. The CanSat competition is a perfect testing ground for this and will allow ICL Rocketry to develop larger and more complex deployable payloads in future, for use on our flagship competition rockets.
As for what task we could perform with this CanSat, we thought we would try our hands at a small lander. The idea was that in a real space mission, these could be deployed “en masse” to rapidly collect soil data on a planet.
Now that we had a concept down, we started designing.
The Design
Our design can roughly be split into four; the sample collection mechanism, the landing gear mechanism, the electronics, the body and the parachute.
The Landing Gear
Now firing the spike wouldn’t be very useful if it wasn’t facing into the ground. Another major challenge of the project was to find a way to ensure this.
Originally we considered using custom parachute design to ensure the upright landing, and we explored some such as cruciform parachutes, however, we later realised that it would require us to make our own parachute and that there would still be a high probability of falling to the side. We thus decided to design landing gear that could right the parachute even if we ended up falling to the side.
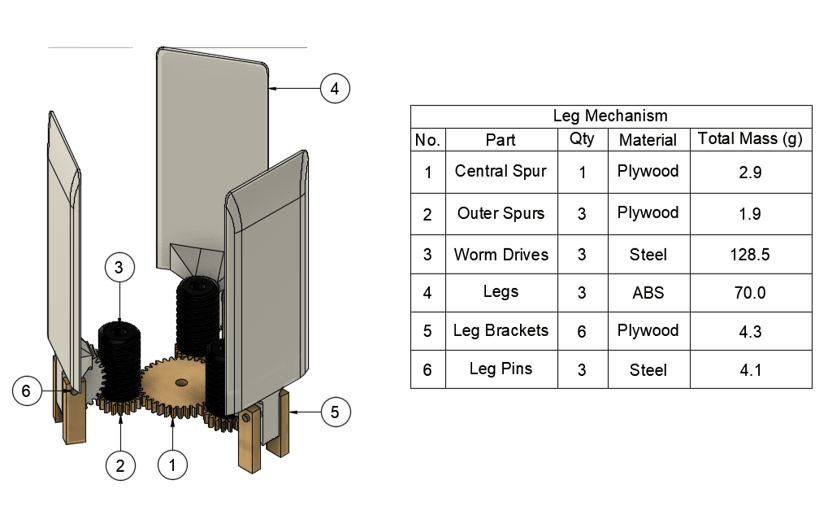
We settled on a design using three legs, driven by a servo in the centre. To transfer the power to the legs, we designed a gear reduction mechanism that uses a combination of standard gears and worm gears to transfer power to the legs. Worm gears were chosen for the additional advantage that they cannot be back driven, decreasing the chance that the legs get forced back into the takeoff state.
The Sample Collection Mechanism
We went through a lot of ideas for how to actually collect the sample, ranging from a drill to an excavator-style robot arm. After looking at all of them, we settled on a hollow spike fired at the ground, forcing a sample inside, and then retracting upwards. Springs however seemed like the only thing that could provide enough “oomph” to decidedly accelerate the spike into the ground. This presented several engineering challenges; how could we make a mechanism to both fire and retract the spike, that is compact enough to fit within the frame?
The solution presented itself as an ingenious mechanism designed by one of our members, inspired by the cocking mechanism of a rifle. After a latch is released, the primary springs would fire a decent housing downwards, driving the spike into the ground. For retraction, the spike would be rotated using the same mechanism as that used for the landing legs, freeing tabs attached to the spike which would cause smaller springs within the descent housing to fire. This separates the spike from the descent housing and retracts it upwards in the process.

The spike also gives the CanSat its name of VLAD, for reasons you can probably guess.
The Electronics
The electronics had the task of both the servo for the landing legs and the solenoid for the spike mechanism. On top of this, it has to communicate with a ground station to command the spike and landing leg deployment. Finally, it has to log all its data to some form of onboard storage.
The power source dictated most of our design decisions. Lithium batteries were not allowed for the competition, and as we had to power a relatively high power solenoid and servo, we had to go with the chemistry that could give the next best current draw, Nickel Metal Hydride. This led to us opting to use three rechargeable AAA batteries, leading to a nominal voltage of 3.6V.
As the servo to control the landing gear and the solenoid to control the spike required a much higher voltage of 6 and 12 volts respectively, we had to use buck-boost converters to step it up to the correct amount. The rest of the electronics could run off of 3.3V, so no further conversion was required.
In terms of sensors, we went for a BNO055 accelerometer and a BMP388 altimeter, in their breakout form. An ESP32 microcontroller was chosen for its built-in SPI flash, which as its soldered, is more resistant to the vibrations of a rocket launch than an SD card. Nevertheless, an SD card is present for easy removal and addition of the data. This ESP32 board is programmed through USB-C, and an RFM95W transceiver was chosen to communicate with the ground station.
Mounting all these components is far from trivial. We considered using a perforated board, however, we found that we would have difficulty finding breakout boards that were small enough to fit all the components, and the wiring would be complex enough that repairs would become impractical. We thus opted for a custom-designed PCB, which allows us to mount everything securely and reliably.
Structure
The Structure was designed around the previous components, such that they could all fit together, and be isolated from each other in their own separate compartments. The main components are laser cut plywood sheets, SRBF shell walls, and threaded rods.

The bottom of the structure houses the landing gear mechanism, the back the spike mechanism, and the front houses all the electronics. The structure should hopefully allow the components to survive the many loads that a CanSat suffers. Which loads? Well, the main ones are vibrations from takeoff, landing, and the parachute shock loads.
Parachute
It goes without saying, for something being dropped from 450m, a parachute is crucial. After abandoning the cruciform parachute idea, we decided to go for a simpler parachute design, sizing it for a decent rate of 7 m/s. For a total mass of 800g, this gave a required radius of 24".
We experimented with the idea of a chute release to stop the parachute from dragging the CanSat after it lands. However, that was abandoned as it added additional complexity, and we couldn't find a way to fit the mechanism within the CanSat.
Manufacturing and Assembly
This is where I would place some cool pictures and a video of the CanSat working. However, given the competition is in a few months, we haven't assembled it yet! All the parts are being manufactured as I'm writing. In a few weeks after this article first goes up, I will update it to reflect the progress!
Overall, the CanSat is on track to be ready for July, thanks to the huge efforts of the team, despite COVID reducing our access to tools and manufacturing to near zero. I, the author, merely have the role of student advisor and have been flabbergasted by how many skills the team has had to learn to be able to design this, and I couldn’t be prouder.
Wish us luck!