
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
使用手柄控制机器人执行相应的动作较为常见,但这种方法的缺点也很明显,对机器人的控制不够直观,执行效率较低,学习操作的时间较长。通过检测人体的肢体动作,将这种动作反应到机械上,这样的操作学习成本很低,容易上手。我们在实验室打造了这样一套装置。

简而言之,这套机甲装置主要分为两个部分,检测动作装置和执行动作机构。这里主要介绍了执行机甲部分的制作流程和方法。一般的动作机器人的成品外形如图所示。
在制作开始前,对制作方案进行了充分的探讨,为了提高机器人的运动速度,我们决定使用轮子作为机器人的下半部分,对机器人的手臂也做了相应的调整。机器人的手臂是由舵机这样一个小单元构成的。一般这样的舵机分为独立式和串联式两种,后者易于布线,在这里我们使用了串联式舵机。


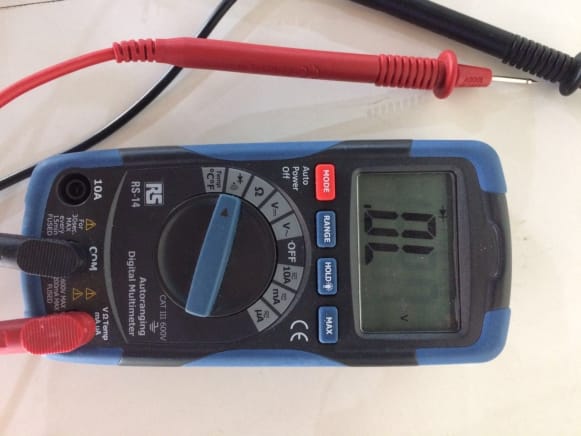
为了使用上位机软件对舵机的初始位置和最大最小角度进行设置,我们使用了对应的通讯芯片对单个舵机进行调试,手工制作了电源接线,使用了RS的万用表来测试连接性。
电机的装配是最难的,要考虑零件的装配顺序,同时要考虑舵机的实轴和虚轴的机械稳定性。
通过上位机的软件设置对应舵机的参数,同时配合机械结构的调整不断修正手臂的参数,这个操作需要耐心和细心,不小心就需要重新安装,我们得到的左臂的参数表如下。

|
Name |
Servo ID |
Min |
Original |
Max |
Tune |
|||
|
L_S |
S_5 |
0 |
0° |
765 |
184° |
988 |
237° |
65 |
|
L_W |
S_6 |
0 |
0° |
750 |
180° |
750 |
180° |
-125 |
|
L_Z |
S_7 |
20 |
5° |
300 |
72° |
601 |
144° |
125 |
|
L_E |
S_8 |
0 |
0° |
384 |
92° |
384 |
92° |
41 |
通过一天的安装得到了机器人的两条运动控制手臂。外形如下。

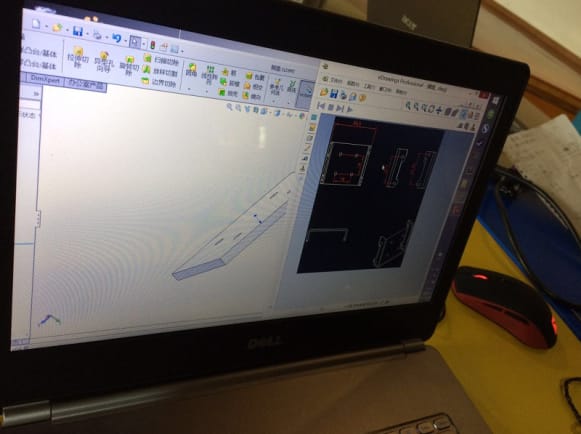
整条手臂由4个舵机构成,其中各个舵机的运动最大角度和位置如表所示,其对应的初始位置也被固定下来。为了保证后期的模型动作设计,需要利用三维软件将模型的空间模型建立起来。这里使用了solidworks对构建的手臂进行建模。后期需要使用Unity对模型进行空间动作的虚拟。

到此,机器人的上半身手臂的搭建基本就结束了。