Sunride Project - Multi-Rocket Avionics System Mk1
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
MRAS Mk1 - Multi-Rocket Avionics System 
Sunride is a student-run rocket building project, we consist of over 50 students from both the University of Sheffield and Sheffield Hallam University. We are currently producing two high-power rockets which will target altitudes of around 30,000ft. These require an advanced avionics package to control the core functions; data gathering, payload deployment, drogue, and main parachute deployment. Sunride has previously launched two award-winning rockets, AMY and HELEN in order to help us progress we decided to design our own (MRAS) Multi-Rocket Avionics System. This system will first be used for Sunride's VESNA and Sunfire rockets and then carried forward as we continue our goal of being the first UK student team to get a rocket to space.
The avionics team at Sunride consists of Zefy Pissaki, Richard Padden, Andreea Anghiel, Mostafa El Debeiki, Rashmita Gajjala, Rhithika Srinivasan and William Meadows. It is led by me, Jacob Lawson.
The PCB Design Process
The avionics PCBs were designed using Autodesk Eagle. This allowed us to start the design with schematics which then worked as an intelligent reference when physical PCB was designed. The MRAS must fit into both Sunride’s VESNA rocket and Sunride’s Sunfire Rocket, along with any future rockets. Any rockets going forward should be larger than VESNA, as such the size constraints are only that the MRAS must fit in VESNA. To make sure there was space for all the required components we split the system into 4 sections: Control Unit, UI & Arming, Power and Actuation.
P1 - Control Unit
The core of the MRAS, this PCB contains the Teensy 3.6 which runs the flight code and controls the entire avionics package. It also includes the two IMUs, the high-g ADXL377 and the low-g DFRobot BMX160+BMP388, along with an SD card reader built into the Teensy 3.6 for storing flight data and measurements. To connect to modules on the other boards 3.5mm pitch (0.1376 inches) terminal blocks have been used, the screw lock mechanism of the terminal blocks secures all inter-board wires during flight.

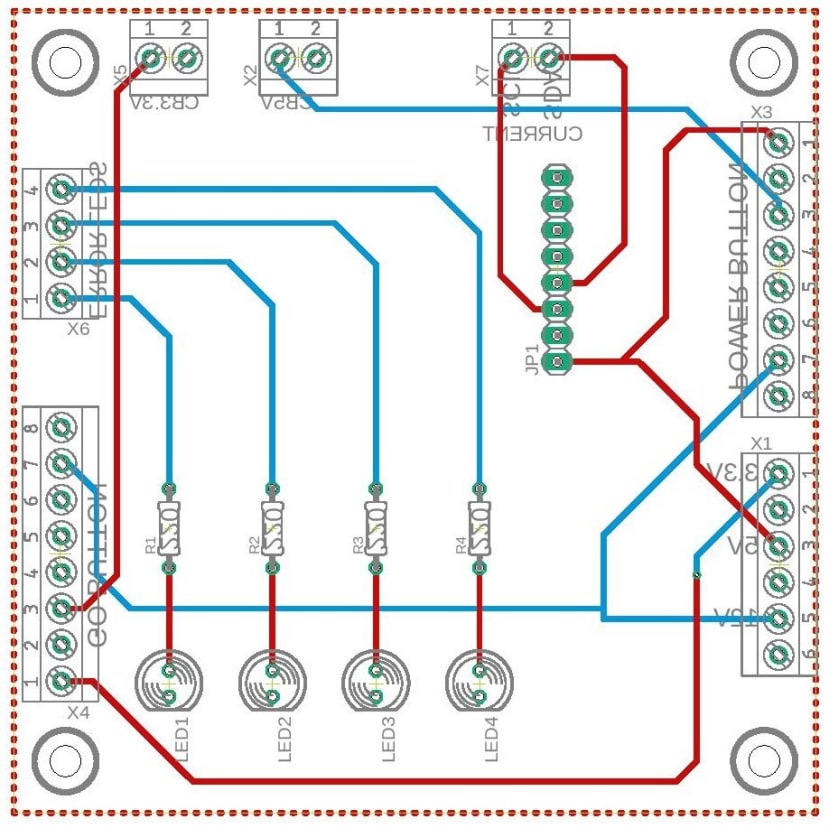
P2 – UI & Arming
This board acts as the main user interface for the avionics package. It is here that the 2 switches connect to the avionics via terminal blocks and the 4 LED array error code system is soldered on. Also due to space constraints on the control unit PCB the INA3221 current sensor is connected to this board.
P3 – Power Board
The MRAS requires multiple voltage inputs to power various components; 3.3V, 5V and 12V. To supply these voltages from the same 14.4V liPo battery power supply SPX29302T5-L/TR voltage regulators were used. To ensure compatibility of the MRAS with future Sunride rockets, spare voltage supply output channels for 3.3V and 12V were implemented. This brings the number of supply outputs for each of the power board’s voltage regulators to 3.

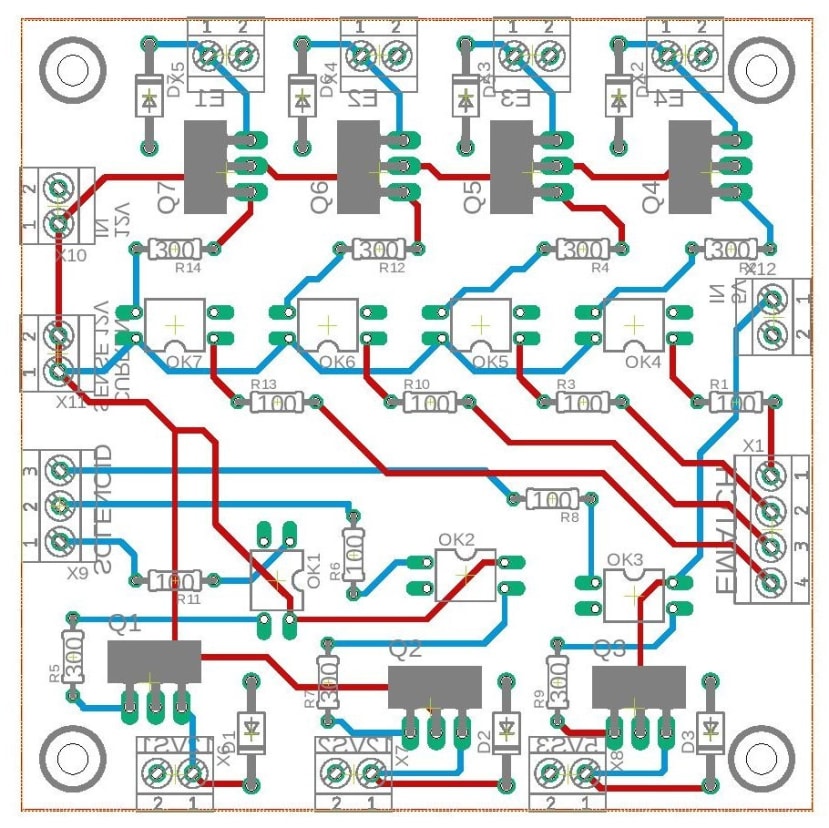
P4 – Actuation
To control the solenoids and the pyro charges that deploy the payload and parachutes while ensuring they do not misfire the MRAS required a dedicated actuation PCB. For each solenoid and pyrocharge channel, there is a Cosmo K101B 4-Pin DIP Optocoupler, this ensures the high voltage supply is disconnected until the command signal is sent from the Teensy 3.6. In series after the optocoupler's high voltage output, there is also a TIP 120G NPN Darlington Transistor, this raises the current of the signal to the required amount for actuating the solenoids. While the TIP120G is not required for the pyro charges they are still included so that all actuation channels can be used for both solenoid and pyrocharge control. The default actuation channel set up is 4 pyrocharges, 2 12V solenoids and 1 5V solenoid.
MRAS Production
Wonderfully on top of the RS student project funding which was used to acquire the components which were soldered onto the PCB, the Sunride avionics was also sponsored by PCBWay. The component soldering took place in the University of Sheffield student-run IFroge engineering workspace. Coronavirus restrictions meant only a few team members could work on the MRAS at the same time.
