Die Räder zum Drehen bringen: Dauermagnet-Gleichstrommotoren mit einem Mikrocontroller verbinden
Artikel folgen
 Dave von DesignSpark
Dave von DesignSpark
Wie finden Sie diesen Artikel? Helfen Sie uns, bessere Inhalte für Sie bereitzustellen.
Dave von DesignSpark
Vielen Dank! Ihr Feedback ist eingegangen.
Dave von DesignSpark
There was a problem submitting your feedback, please try again later.
Dave von DesignSpark
Was denken Sie über diesen Artikel?

Der bescheidene Dauermagnet-Gleichstrommotor mit Bürsten ist nach wie vor bei Konstrukteuren für kleine mobile Roboter, Automobilsysteme und Spielzeuge beliebt. Er besteht aus drei Hauptkomponenten:
- Einem Außengehäuse mit zwei im Inneren angebrachten Dauermagneten, die den Stator bilden.
- Dem Rotor oder Anker, der aus mindestens zwei auf einen Eisenkern gewickelten Kupferdrahtspulen (Wicklungen) besteht und sich innerhalb des Stators dreht.
- Dem Kommutator mit Bürsten, über die die drehenden Spulen mit der Stromversorgung verbunden werden können. Der Kommutator wird in isolierte Segmente aufgeteilt, sodass das von jeder Spule erzeugte elektromagnetische Feld bei der Drehung der Welle die Polarität wechselt.
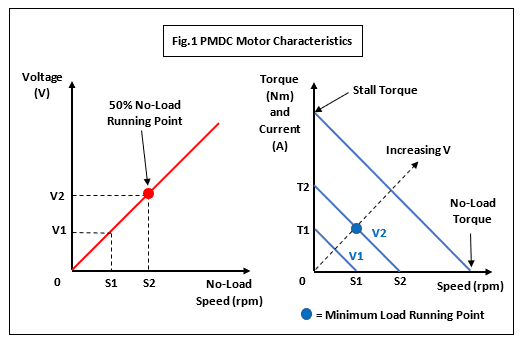
Durch die Wechselwirkung zwischen dem statischen Magnetfeld und dem Rotorfeld dreht sich der Rotor. Für einen funktionierenden Motor werden mindestens zwei Spulen benötigt, wobei der Kommutator in zwei 180° große Segmente aufgeteilt sein muss. Ein praktisch einsetzbarer Motor erfordert mindestens drei Spulen und drei 120° große Segmente. Ein Zwei-Spulen-Motor startet nicht selbsttätig und „blockiert“, wenn die Nord- und Südpole der Stator- und Rotorfelder gleich ausgerichtet sind. In diesem Fall überbrücken wahrscheinlich die Bürsten die Segmentlücken, sodass die Spulen kurzgeschlossen werden und die Stromversorgung unterbrochen wird. Durch Hinzufügen einer dritten Spule wird dieses Problem beseitigt und sichergestellt, dass der Motor selbst starten kann. Hochwertige Motoren haben mindestens fünf Spulen, manchmal sogar mehr, um einen wesentlich reibungsloseren Betrieb zu gewährleisten. Das Schöne am Dauermagnet-Gleichstrommotor sind seine Einfachheit und die Linearität seines Betriebs (Abb. 1). Wie Sie sehen, sind alle Linien in den Diagrammen gerade.
Antrieb eines Dauermagnet-Gleichstrommotors
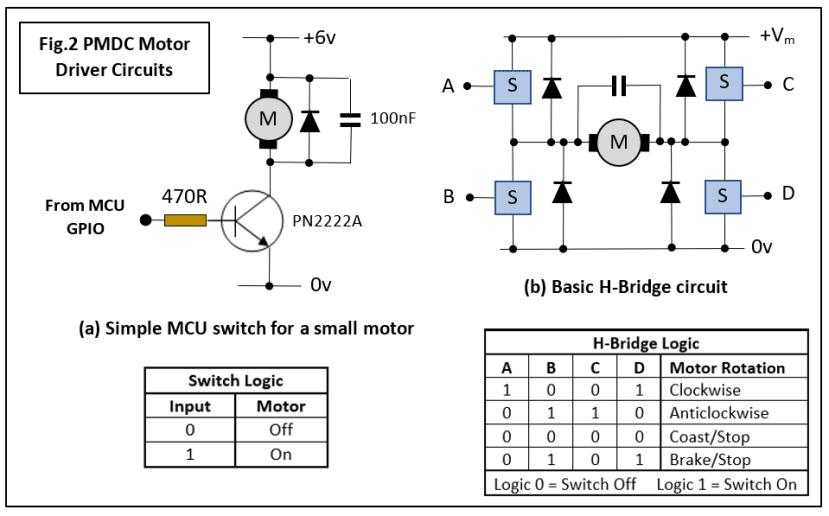
Die einfachste Schaltung besteht aus einem Schalter und einem Gleichspannungsnetzteil. Diese ermöglichen das einfache Ein- und Ausschalten ohne Richtungssteuerung. Ein praktisches Projekt erfordert wahrscheinlich einen Elektronikschalter – ein MOSFET- oder Bipolar-Transistorgerät, das über einen Mikrocontroller-GPIO-Pin gesteuert wird (Abb. 2a). Der dargestellte einfache Einzeltransistor-Schaltkreis eignet sich für Niedrigspannungs-Hobbymotoren mit einem Stillstandsstrom von weniger als 1 A. Zu beachten ist dabei die Diode zum Schutz des Transistors vor der hohen Sperrspannung, die beim Ausschalten einer induktiven Last auftritt. Der Kondensator hilft dabei, die durch die Kommutatorwirkung des Motors erzeugte elektromagnetische Störung zu verringern.
Drehzahlregelung
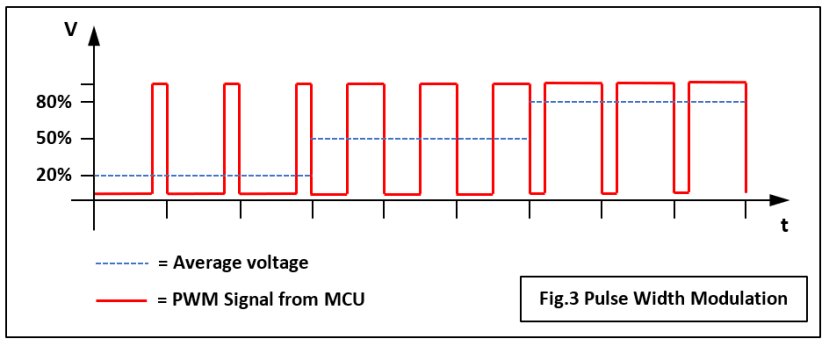
Die meisten Anwendungen benötigen auch eine Möglichkeit, die Motordrehzahl zu ändern, insbesondere wenn ein Regelkreis verwendet werden soll. Aus dem linken Diagramm in Abb. 1 ist ersichtlich, dass die Drehzahl des Dauermagnet-Gleichstrommotors linear mit der angelegten Spannung in Beziehung steht. Eine direkte Spannungsänderung durch den Betrieb der Treibertransistoren in ihrem linearen Bereich mithilfe eines Digital-Analog-Wandlers (DAC) würde zwar funktionieren, jedoch mit einer massiven Energieverschwendung in Form von Wärme. Eine viel elegantere Methode ist der Antrieb der Schalter mit einem digitalen PWM-Signal (Pulsbreitenmodulation) (Abb. 3).
Dies ist aus den folgenden Gründen mit Abstand die beste Methode:
- Das Impulslängenverhältnis der Impulsfolge ist direkt proportional zur durchschnittlichen Spannung.
- Die Treiber werden immer noch ein- und ausgeschaltet, wodurch die Verlustleistung minimiert wird.
- Die meisten modernen Mikrocontroller-Einheiten verfügen über integrierte PWM-Signalgeber-Hardware.
Das PWM-Signal wird durch ein UND-Gatter mit den anderen Eingangssignalen zur H-Brückenschaltung hinzugefügt, sodass alle Schalter deaktiviert werden, wenn das Signal schwach ist, und aktiviert werden, wenn es stark ist. Dies bedeutet, dass der Motor während der starken Phase mit Strom versorgt und während der schwachen ausgeschaltet wird. Der Motor befindet sich während dieser Ausschaltzeit im Frei- bzw. Leerlauf. Wenn alle Schalter über die Steuersignale ausgeschaltet werden, verlangsamt sich der Motor und stoppt. Wie lange das dauert, hängt von der Last ab. Der Dauermagnet-Gleichstrommotor hat eine einzigartige Eigenschaft: Wird die Stromversorgung abgeschaltet und werden die Klemmen kurzgeschlossen, kehrt sich das Rotorfeld kurz entgegen der Drehkraft um, was den Motor zum plötzlichen Stillstand bringt. Bei der H-Brückenschaltung wird dies durch gleichzeitiges Einschalten der Schalter B und D erreicht.
PWM-Frequenz
A question often asked is: ‘What PWM frequency should I use?’. In principle, anything up 20kHz can be used to get it out of human hearing range. I have found that with small hobby motors it’s hard to get a reasonable range of speed control with much more than 250Hz. One explanation may be that the very narrow pulses of a high-frequency signal are just not long enough to ‘kick’ the rotor into action. One thing is certain: it depends on the motor, and a certain amount of experimenting may be needed.
Die L293D-Vierquadranten-Halbbrücke
Wie bereits erwähnt, ist die H-Brückenschaltung so nützlich, dass sie in verschiedenen Formen von einer Reihe von Chipherstellern erhältlich ist. Der L293D ist zum Beispiel schon seit Langem auf dem Markt und sehr beliebt bei Konstrukteuren, die eine Schnittstelle zwischen einem Mikrocontroller und kleinen Gleichstrommotoren benötigen. Der Chip enthält eigentlich vier „Halbbrücken“, wobei letztere die beiden Transistorschalter auf jeder Seite des H sind. Anders ausgedrückt kann ein Chip als zwei unabhängige H- oder Vollbrücken zur Steuerung von zwei Motoren verdrahtet werden (Abb. 4).

Zum Schluss:
Die neuesten Entwürfe von Dauermagnet-Gleichstrommotoren verfügen über eisenlose, röhrenförmige Spulenarmaturen, die sich um den Dauermagnetstator drehen. Sie sind zwar teuer, können aber sehr schnell beschleunigen/verzögern und bieten eine wesentlich höhere Effizienz als die Standardsorte mit Eisenkern. Es war ein eisenloser Motor – für den Einsatz im Weltraum etwas modifiziert –, der den Mars Exploration Rovers Spirit und Opportunity viele Jahre lang die Antriebskraft lieferte – weit über die ursprüngliche Missionsdauer hinaus.