SLAM Game
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
By Yunzhou, YAN | Xinyue, LI | Jiaying, FANG
Simultaneous Localization and Mapping (SLAM) is a new technology for robots to explore and understand their environments. One of main objectives using SLAM technology is to build a map automatically. This project is to develop a simple game by using SLAM technology. In this game, we develop a robot car with a LiDAR-SLAM system [see Fig. 5.1]. The objective of the game is to remotely control the robot car to escape from a maze. Without the prior knowledge of the maze, the LiDAR-SLAM system can build a map in a maze and players can follow the map to escape from the maze.

Figure 5.1: The outlook of the robot car
There are two major parts in the robot car. One is a STM32F103RBT6 microcontroller with an extension board and other components (see Fig. 5.2). It is used to control the movement of the robot car. The function of the ultrasonic sensor is to detect whether the car is too close to an obstacle or not. The Bluetooth module is for the wireless communication between the microcontroller and a mobile phone (this part will be described later). The other one is a Raspberry Pi 4B with a Lidar (LiDAR-SLAM sensor) (see Fig. 5.3). The Raspberry Pi regularly receives data from the Lidar and process the data with the Hector SLAM algorithm to generate a map. Moreover, it connects to the player’s computer using Wi-Fi to show the map (see Fig. 5.4). To remotely control the robot car, we develop a mobile app in the mobile phone (see Fig. 5.5(a)). It connects to the robot through Bluetooth communication. The app can report the distance between the obstacle and the car (see Fig. 5.5 (b), (c) and (d)).

Figure 5.2: The microcontroller with an extension board and other components in the robot car
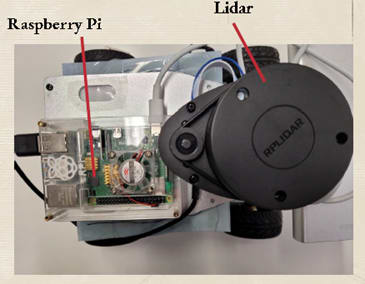
Figure 5.3: The Raspberry Pi with the Lidar sensor

Figure 5.4: The software to show the map generated by the Hector SLAM algorithm

Figure 5.5: Mobile app
Comment from judges: The team made a game by using a LIDAR (Light Detection and Ranging) sensor. However, it is not convincing that the game is interesting and it is better than using a camera instead. Moreover, the team cannot compare its performance with a game using a camera.