
 戴夫来自 DesignSpark
戴夫来自 DesignSpark
你觉得这篇文章怎么样? 帮助我们为您提供更好的内容。
戴夫来自 DesignSpark
Thank you! Your feedback has been received.
戴夫来自 DesignSpark
There was a problem submitting your feedback, please try again later.
戴夫来自 DesignSpark
你觉得这篇文章怎么样?
当小编第一次见到踩着独轮车的小鲜肉从身边“飘”过的时候着实被他脚下的“风火轮”吸引了目光。随着各项技术的不断发展,越来越多的人都踩着“风火轮”出街了,这样也避免了限号的尴尬。那自平衡机器人的控制到底是如何实现的呢?跟着小编一起来了解一下吧。
在机器人技术发展过程中,用机器模仿生物的智能行为始终是人们研究的目标。与一般移动机器人相比,独轮机器人系统结构更加简单,外型灵巧,独轮机器人将系统与地面接触点数目降到最小,减小了外界扰动,可以高速运行,有广阔的应用前景。国内外很多研究学者对其进行了各方面的研究,其中机器人的平衡控制问题是控制中必须研究的一个问题。自平衡机器人平衡控制系统是其完成各项任务的基础,所以研究自平衡机器人的平衡控制系统有重要的意义。近几年来,在传感器技术以及人工智能理论的推动下,自平衡机器人的研究得到较快和较深入的发展。
自平衡机器人平衡系统工作原理如下图所示,自平衡机器人由体内嵌入式微处理器控制,采用加速度传感器和角速度传感器组合构成的姿态检测系统来检测机器人的运动姿态。因信号中混杂着干扰噪声,先要对姿态检测系统采集到的角速度、加速度的数据做滤波处理,再经过一定的控制算法,计算出PWM信号,控制输出转矩,对电机进行驱动控制,调整车体平台的运动姿态,从而使机器人始终保持动态平衡。

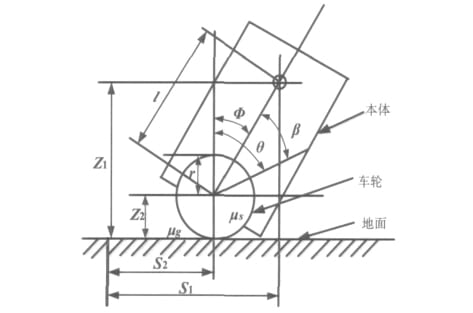
两轮自平衡机器人可以看作是绕轮轴线旋转的一维空间的倒立摆。当机器人重心偏移时,系统发生倾斜,如下图所示。
自平衡机器人其中的控制器为可变论域自适应模糊PID控制,控制车体倾斜角度。其控制过程是:首先由姿态传感器采集车体倾斜角度信号,模糊控制器I再根据倾斜角度的大小及其变化率的大小进行论域调整,得到论域因子α,论域因子α作用到模糊控制器II上,动态改变模糊控制器II的论域范围。然后经糊控制器II推理得出PID增量ΔKp、ΔKi和ΔKd,再经PID控制器对Kp、Ki和Kd进行参数调整,使机器人保持动态平衡。

模糊 PID 控制方法实现了论域随自平衡控制系统要求进行自适应伸缩,较好地解决了机器人自平衡系统控制规则数量与控制精度间的矛盾。仿真研究表明,该控制方法使机器人的平衡控制系统具有自适应能力强,调节时间短,实时控制性能好的特点。
虽然为了安全起见,国家对平衡车出街进行了一定的限制,但这丝毫不影响平衡车技术的发展,制造出更稳定、更可靠的平衡车成为了大家一起努力的目标。经过小编的介绍您对这项技术是不是也有了更深入的了解呢?自动控制领域的发展越来越迅速,非常有意思。