Remap UK - Wheelchair and Tablet Control Solution: Part 4
Follow article Dave from DesignSpark
Dave from DesignSpark
How do you feel about this article? Help us to provide better content for you.
Dave from DesignSpark
Thank you! Your feedback has been received.
Dave from DesignSpark
There was a problem submitting your feedback, please try again later.
Dave from DesignSpark
What do you think of this article?
Remap is a UK charity that provides bespoke engineered solutions to help people with disabilities to achieve greater independence and quality of life (Remap.org.uk). As reported in our previous news articles, we are providing a solution for Kane to become more independent by giving him the ability to control various components of his wheelchair that normally are carried out for him by his parents or a carer. This article focuses on the equipment design finalisation and development, and the trials and tribulations over the last year, leading to the recent initial commissioning activities. Logistical constraints arising from Kane relocating with his parents from West Sussex to Derbyshire have added to the challenge, and Remap volunteer engineer Noel has been progressively assisted by Remap colleagues in the local Derbyshire group.
The timeline of these activities is described below.
Quarter 2 2021
Since the previous blogs around a year ago, Remap volunteer engineer Noel’s work continued on the motor controller boards and managed to squeeze two PIC controllers circuits onto one board. Resulting in space for one “shield” board, and three stacked PIC boards, giving me the capability to drive the five motors needed, plus one spare driver for the future. The open-source application KiCAD was used to layout the boards for the PCB manufacturer (JLC PCB in China) on double-sided boards. Once laid out, the Gerber files were sent to the PCB manufacturer to supply them.
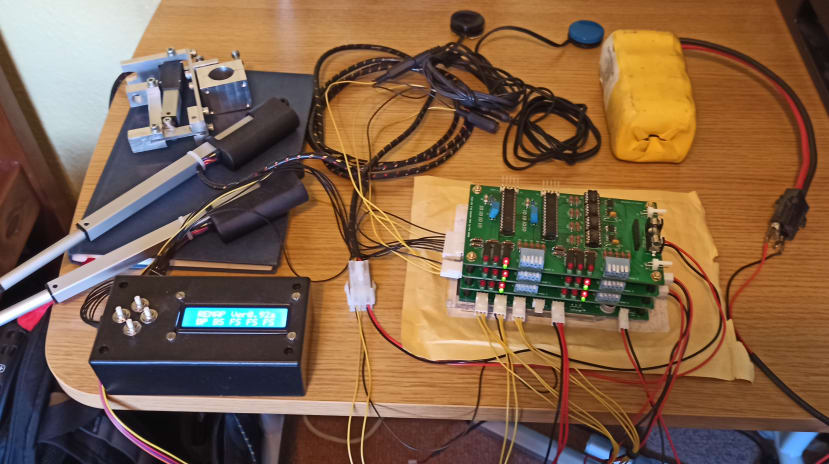
With a test “brick” now built and working, the Arduino software was updated to take advantage of the new PIC features. The various component parts are shown in the picture below.
Noel says “My approach was to include as many safety features as I could to reduce any risk of pinning Kane down in the wheelchair”, these include -
- Standby/Active mode
- Speed ramping-The motors' speeds are ramped up over a period of time, this reduces the jolting of the arms as they move and reduces the chance of any electrical “spikes” on the power rails.
- Electrical braking
- Speed reduction on approach–for more accurate and controllable positioning of the arm than was previously possible.
- Motor overrun timer
- Overcurrent detection
- Position sensing
Quarter 3 2021
With progress now being made on the software, Noel needed to test the system “in anger” with a real arm. The client arranged to provide a Daessy arm to do this. Here it is on the test rig ready for testing.

Noel continues “With the forward/backward actuator in place, improvements were made on the position sensor. The early version didn’t have the range I felt I needed, and I was also concerned about the fact that it rubbed against the actuator arm and might cause wear, as well as the readings being likely to change over time. “
“During these tests, there was a moment when I heard a pop and saw a small puff of smoke from the motor controller boards. After closer inspection and testing, I managed to blow several output stages again and came to the conclusion that it was the fast “braking” of the motors from high speeds that was the issue. I managed to reduce the stress experienced on the output stage by not trying to stop the motors dead if they were running fast (a bit like wanting to do an emergency stop in a car by throwing it into reverse!) I would now ramp down the motor speed until it was close to being stopped, when I would then put the brakes on hard. “
“However more “harsh” tests on the motor controller by making it drive all the motors on the Daessy arm in sequence continuously for a few minutes resulted in more puffs of smoke, and the circuits failing. I decided not to try and pursue the task of getting the current components to handle the load, but to redesign the output stage with larger power handling components by choosing discrete MOSFETs rather than a single H-bridge component. The ratings of the discrete components were now 10 Amps, with a capability of handling short peaks of 38 Amps.
I built a “breadboard” version first to check that the new components could handle the now better-understood loads of the motors.
The new circuit seemed to handle the load without blowing up or getting warm. I set about modifying the PCB, ready to put an order into the PCB manufacturer.
Here is the newly laid out board on the “KiCad” PCB design application and below this is a 3D view of what the board might look like when populated with components. You can see the eight larger MOSFETs (four for each of the two circuits on the board).”


“I carried out a number of tests with the new cards by driving the arm’s motors under load, and all seemed to be working okay. “
Quarter 4 2021
“With a good chunk of the hardware now complete, including various modifications, I updated the software to include the various changes in movements. This involved changes in the arm movement to provide greater accuracy and consistency “
The motor controller boards were housed in a suitable enclosure that would be fixed to the wheelchair frame. A number of labels were fixed on the outside to identify what each lead was.

Quarter 1 2022
“With all the mechanical, electrical and software components now built, I was finally in a position to arrange a “first fitting” on Kane’s chair. As the build progressed there were always a few measurements that you hadn’t taken that you wished you had. Pre site visit code changes were made to take different parking options into account, and avoid making changes on the day.
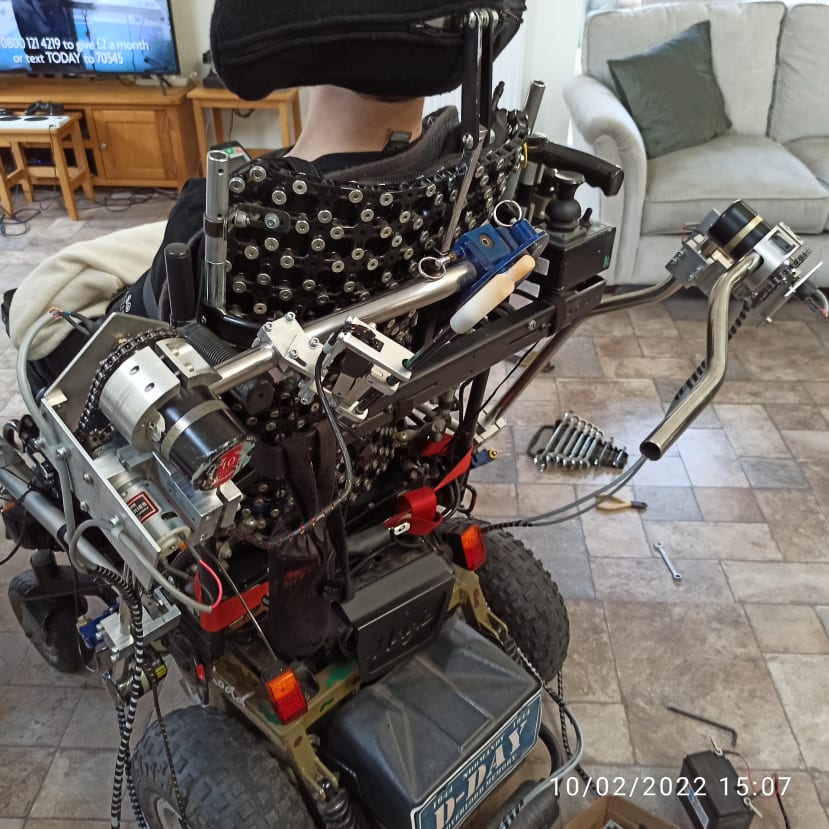
The pictures below show the system during and after fitting assisted by local REMAP colleague Malcolm, and all the motors were installed and adjusted to move the arms to the required positions.
Some mechanical clamp issues were noted for future modification
With the stick dispenser fixed to the tablet arm, it was adjusted so that Kane could pick up the stick pointer when he wanted to use the tablet, and could then return it to the holder when he had finished.
After a long day’s work, all the system components were in place, and Kane was able to learn how to use it.


After leaving, Kane’s family were able to provide a video of the equipment in use. It was clear that Kane is getting used to using his new system! The forward plan was to make some modifications and return to Kane with further testing.
As of today, a number of operational issues have been highlighted resulting in the need for further modification. The diagnostic box proved very useful in resolving some issues and highlighting others. Some modifications will require further mechanical adjustment over the coming weeks, which will allow the finished system to be enjoyed by Kane and his family.
The ingenuity of design to meet the challenge of the needs of Kane, combined with the diversity of engineering skills required to provide this Remap solution is thanks primarily to engineer Noel, who has dedicated his volunteer time in the last 2 years to helping Kane achieve his goal of improved independence and quality of life.